一种运用计算机视觉和光学导航技术的采摘机器人
2021-02-28河南工业职业技术学院倪江南
河南工业职业技术学院 李 旗 倪江南
为了全面提升采摘机器人的运行效率,本文基于计算机视觉结合光学导航的技术方式,实现控制系统的合理设计。在实际运行中,可以利用激光扫描与机器视觉相结合的方式,提升采摘的整体准确性与效率性,满足当下采摘机器人的使用需求。
1 计算机视觉
在计算机视觉研究领域,主要可以分为图像处理、模式识别、图像识别、景物分析以及图像理解等诸多的技术环节。图1为计算机视觉图。
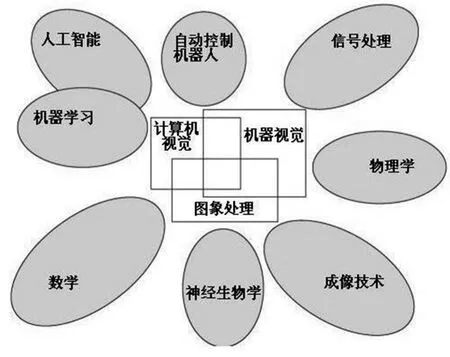
图1 计算机视觉图
1.1 图像处理
图像处理技术是一种可以将输入其中的图像实现转变的技术,形成所希望呈现的图像特征,该技术主要是利用计算系统将图像中的特征进行提取与处理。例如,在对某图像进行处理的过程中,可以将一些较高信噪比的图像信息进一步处理,以便突出图像当中的细节,便于工作人员的后续操作处理。
1.2 模式识别
模式识别技术是一种对图像提取一些特征信息或一些结构性信息,将其分为不同的类型。例如,对于文字以及指纹信息的识别,就可以区分这两种信息。计算机视觉的模式识别技术,可以对特定区域进行针对性的信息分类与整合。
1.3 图像理解
在对一幅既定的图像分析中,图像理解程序可以很好的对图像本身进行描述,同时也能对其进行解释,并基于图像中的实际内容做出相应的判断,因此在人工智能视觉的研究中,经常将其利用在一些景物的分析中。
2 视觉导航和液压伺服控制系统设计
采摘机器人的设计就是一种基于人体行为规律的参考,例如在行走移动功能、感知功能、作业能力等方面的设计中,就需要利用计算机编程技术来推动机器人的操作。另外,还需要利用相关程序,对机器人进行行为动作的编程,以此满足各种不同工作情景下的动作需求。
可以安装视觉自动导航功能,帮助采摘机器人形成环境图像,以此更加全面的规划动作路径。在采摘机器人的路径规划过程中,通常都是基于仿真模拟的系统设计方式,将其导入地图,并将其以bmp的格式进行保存。在这样的设计模式下,图像中的每一个像素点都是一个单独的栅格,可以形成准确性较高的路径。
在采摘机器人运行过程中,可以基于导入的环境地图并采用实时图像处理的方式,及时确定具体的目标;同时,还可以进行路径的合理规划。采摘机器人上的图像传感器可以实时的采集到图像,并对其图像进行平滑处理形成清晰度较高的图像,这样在行走路线规划的过程中,就能够实现更加准确高效的采摘操作。采摘机器人中的液压伺服系统主要包含液压泵、液压执行元件以及电液伺服阀等诸多设备构件,其中所使用的电液伺服阀是整个液压系统中的核心组成部分,其可以将电信号进行液压化,并对液压缸中的流量实现控制,以便全面控制机器人自身的运动。图2为采摘机器人机械液压控制原理图。
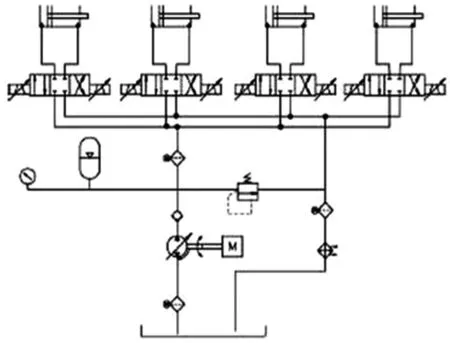
图2 采摘机器人机械液压控制原理图
3 光学导航技术在采摘机器人中的应用
光学导航装置可以帮助采摘机器人实现自主化的采摘作业。为了实现高效的采收作业,需要让光学导航装置对其作业环境进行全面的检测,同时也可以利用激光扫描的方式,帮助采摘机器人确定位置。在完成定位操作之后,还需要测量与实际采摘对象之间的距离。在这样的操作模式下,让采摘机器人可以锁定采摘对象,完成采摘操作。
激光扫描功能已成为自主导航系统中十分重要的组成部分,同时也是一种重要的导航方式。在操作的过程中,主要利用激光扫描的方式得到各种农机的角度、距离等方面的信息,将其相关信息反馈到导航控制系统中,这样便可以实现高精度的自主化农机导航处理。
采摘机器人在运行的过程中,测量被采摘对象的角度。在确定了角度信息之后,便能够基于视觉技术计算出与采摘对象的实际距离,并利用激光扫描的方式确定自身的位置信息以及与被采摘对象之间的距离,以此驱动自身的移动模块来到合适的采摘位置,完成采摘工作。在采摘之后还可以利用视觉模块对果实的成熟度进行详细的分析与识别,这样便完成了一整套采摘任务。
视线信息就是在采摘机器人的移动过程中,需要对采摘机器人进行视线方面的测量,以此明确采摘机器人自身的位置与坐标。这样的功能可以对自主导航系统出现的误差进行有针对性的调整,避免出现位置方面的误差。
机器人的视觉技术往往与光学导航系统有着较强的关联,其可以分为两部分,分别为上位机系统和下位机系统。在上位机系统的设计中,由图像检测系统、控制系统以及无线通信系统所构成,同时在一些采摘机器人的设计中,也使用了信号采集系统。在运行中,能够对采摘机器人运行的信息数据进行全面的记录,并对其作业行为进行实时的监控。在下位机系统的设计中,基本上由导航系统、采摘机器人、自动充电系统所构成,这样就可以实现对机器人的物理控制。
在采摘机器人运行过程中,激光器旋转后便可以通过扫描的方式得到一系列发射角数据信息。在众多的发射角数据中需要选择3个发射角,并进行科学的运算分析之后,便能够得到较为准确的采摘机器人位置坐标。采摘机器人也可以利用激光扫描的方式,确定其自身的全局坐标位置。
4 采摘机器人光学导航定位测试
随着自动化技术的发展,采摘机器人的自动化程度越来越高。在投入到农业生产之前,需要保障采摘机器人可以对采摘对象准确定位,特别是在一些果实比较小的果树采摘中,对采摘有着较高的要求。
采摘机器人在采集图像信息后,一般会采用曝光融合的处理方式实现图像信息的全面处理和分析。在基于特定的图像处理算法之后,才可以实现图像特征的信息提取。本系统中的导航系统,需要基于图像特征对采摘机器人以及果实图像实现测算分析,以便能够实现自主导航作业。为了保障采摘的精准性,可以利用定位测试的方式对采摘机器人的实际运行情况进行分析和确认。相关工作人员进行详细的测量后发现,采摘机器人在此设计方式下可以实现较为准确的采摘作业。因此,将这种光学导航系统应用到采摘机器人上,有着较强的可行性。
总结:为了保障采摘机器人实现较高的采摘准确性与效率,需要提升采摘机器人的自身定位导航精确度,同时也需要利用光学导航的方式使采摘机器人可以及时的采集到各种图像信息,进行全面的信息数据分析与处理。现阶段的采摘机器人在实际运行中,经常会受到外界因素的影响,导致实际的采摘操作无论是在效率还是在准确性方面,都存在着严重的问题。本文所讨论采用的计算机视觉技术可以赋予采摘机器人光学导航的高效率运行逻辑,在采集到各种数据信息之后,能够实现图像信息的高精度分析、整合,以此更加准确的了解此时采摘机器人的位置,并发出最佳的操作指令。采摘机器人这样的操作方式已经得到了较为严谨的数据验证,可以实现良好的采摘效果。特别是在完成采摘操作之后,还能够利用视觉识别技术保障数据信息得到针对性的处理。