自主列车运行系统分析
2021-02-28上海工程技术大学城市轨道交通学院徐纪康
上海工程技术大学城市轨道交通学院 徐纪康
卡斯柯信号有限公司 潘 亮 朱孟雯
1 背景
CBTC和无人驾驶技术已经相当成熟并被广泛使用在全国各地的城市轨道交通中。但是,当突发特殊情况(车地通信故障、区间/车站火灾等)时,需要依靠调度或者司机人工来处置并恢复到正常运行中。同时,为了保证在信号系统降级情况下的安全运行,需要采用次级检测设备来保证列车的粗略定位。所以,如何在故障情况下,减少人工干预和处置故障的时间,又能保证安全。同时,减少对于次级检测设备(主要是计轴或者轨道电路设备)的依赖,是需要解决的关键问题。
在航空航天领域,卫星系统完全靠“自主运行”来保证自身安全和各种任务的完成。后来,自主运行的概念应用到汽车自动驾驶领域。美国机动车工程师学会(SAE)定义了L0到L5的自动驾驶等级。汽车自动驾驶主要依靠信息通信技术、人工智能技术以及网络技术实现自动驾驶功能。
在轨道交通领域,列车在非完全封闭环境下的安全高效运行是基本问题。因此,本文主要根据现有CBTC和无人驾驶技术的特点和安全运行需求,结合航空航天相关技术和国内外相关文献,分析自主列车运行系统(TACS)的特点、功能以及部分典型场景。
2 系统特征和功能分析
TACS系统不是指无人驾驶信号系统(UTO),而是指列车能够在动态变化环境下(比如,雨雪天气突发情况下,列车前方火灾等情况下),列车自主感知周围情况,自主决定前方的运行策略,而不需要等待调度中心下发命令。因此,自主列车系统可以在非结构化和动态的开放环境中安全运行。
为了实现自主列车运行的目标,根据国外相关文献,定义了自主列车运行控制等级(LOAn)。TACS系统分为LOA1,LOA2,LOA3,LOA4四个等级。
自主列车运行系统逐级发展和实现,最终实现列车依赖于对周围环境的感知,自主决策,自主安全运行,达到无人调度的目标。但是,实现LOA4的目标,需要分步实现,如表1所示,不同的LOA等级代表不同的自主列车运行等级。

表1 自主列车运行等级功能研究
自主列车系统配合传统的CBTC系统,采用分级方式,最终使整个信号系统达到LOA4。实现整个地铁大系统的智慧运行。
3 系统关键技术研究
基于TACS的特征和功能分析,需要依赖于以下关键技术的成熟和实现:
(1)多传感器融合技术;
(2)人工智能技术(AI)。
本文主要从以上两方面来进行分析和阐述。
3.1 多传感器融合技术
系统需要感知周围环境,那么列车的安全定位精度和安全速度越准确,感知到的环境精度越高。那么决策也就最安全,最优。否则,可能导致问题或者事故的发生。所以,传统的速度传感器加上应答器已经无法满足列车保持定位的需求。参考纽约地铁改造的相关文档,采用以下的传感器方案,能够保证安全定位测速的同时,还能够提供障碍物检测功能,以满足LOA2的要求。如图1所示。

图1 基于新型传感器融合的列车定位技术
结合传统的速度传感器和应答器,采用传感器融合技术,能够提高列车的定位精度。同时,采用雷达可以检测列车前方的障碍物,并使用激光雷达来精确测量列车距离前方列车的目标距离,保证列车安全停车功能。
多传感器融合技术,涉及到相关算法的精度和安全认证要求,有待专门分析和研究。
3.2 AI技术
采用AI技术,保证列车在大量的运行过程中,学习各种故障场景的处置流程和方法。这样可以保证列车在以后碰到类似故障情况下,可以更快更优地进行自主处置和分析。
通过调查和统计发现,人的可靠性比AI机器的可靠性要低很多。因此,AI技术的应用,未来可能在故障处置的某些方面优于人工处置。
AI技术的安全性有待证明,所以,本文提出了基于AI融合的方案来提高AI技术的安全性。例如,采用雷达识别和图像识别技术的算法融合来降低AI技术误判的可能性,提高障碍物识别的安全性。人和AI机器的可靠性对比分析如图2所示。

图2 人和AI机器的可靠性对比分析
4 系统典型场景分析
为了深刻理解自主列车控制系统,通过以下场景的分析,突出了自主列车控制系统的优势:
(1)正常场景,
(2)车地通信故障场景,
(3)火灾场景。
4.1 正常场景
如图3所示,在TACS中不再需要巡道车来完成早上的巡道任务。投入载客运营的列车具备自主巡道功能。列车接收到任务或者根据时刻表来运行。如果自主列车在运行过程中,遇到障碍物,则会自动在障碍物前方停车并上报故障信息。同时,如果前方轨道状态不平顺,列车主动降速,保证运行安全,同时主动上报轨道的健康状态。这也是自主列车控制系统的优势。
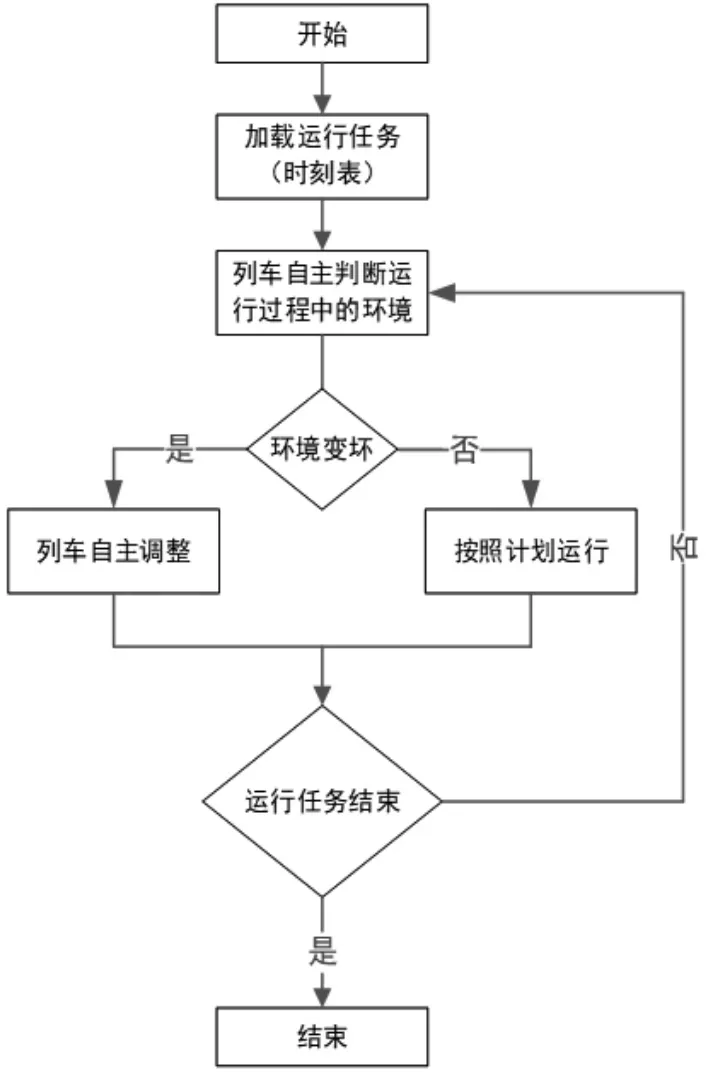
图3 自主列车运行系统正常场景流程图
当列车感知到雨雪天气,自动降低制动率值,减少打滑的情况发生。保证良好的运行状态。同时,根据计划,判断列车的早晚点情况而自动调整运行等级。
因此,TACS通过传感器,实现部分非通信信号专业设备的故障监测功能。
4.2 车地通信故障场景分析
当车地通信发生故障时,在原来的CBTC系统中,列车必须要先停车然后人工切换到后备模式。这不仅影响了本身列车的运行效率。同时也给周围的列车带来了运行中断的影响。从而,降低了整个系统的运行效率,提高了整个系统的运行安全风险。
但是,在TACS系统中不存在这个问题。如果车地通信故障,列车完全靠自身传感器感知前方的安全运行距离。不需要列车停车切换的这个过程。也不影响周围其他列车的正常运行。这也是TACS系统为了解决CBTC故障情况下降级到后备模式的痛点。
4.3 火灾场景
如图4所示,碰到火灾情况下,传统的方式主要依靠调度员的经验来处理,根据隧道内的风向,发生火灾列车的位置,以及前后列车的情况来分别发布调度命令给每个列车。这样的处置过程和反应时间相对比较长。
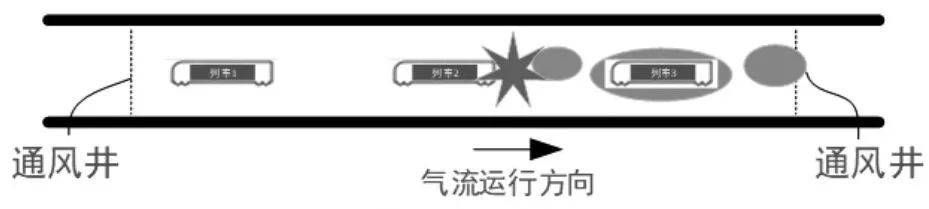
图4 火灾场景
但是,自主列车基于AI技术自主学习故障场景的处置方法,根据经验和规范,以及故障场景下的“环境”,更加快速地处置这种火灾场景。因此,在类似这样的故障场景下,自主列车比司机和调度员的反应更快,处置时间更少,可以减少很多不必要的损失。
因此,采用AI技术,通过大量故障场景的学习,使自主列车的“经验”更丰富。
本文分析了自主列车运行控制系统不同等级,以及不同等级下的功能分析。同时,本文提出了TACS需要考虑的多传感器融合技术和AI技术,以及相关的安全功能。通过对比分析不同场景下的TACS系统运行情况,突出了TACS相比CBTC系统的优点。但是,TACS系统关键技术的解决,有待相关厂商具体解决。