基于条纹图相位匹配的立体测量技术研究
2021-02-28朱荣刚张敏涛朱霞陈鹏
朱荣刚 张敏涛 朱霞 陈鹏



摘 要:基于多相机机器视觉的三维测量技术,需要在被测物体表面寻找特征点,根据特征点在各相机中图像位置的不同来确定其在空间中的三维坐标。如果被测物体特征点不明显,又或者较少的话,需要人为粘贴标记点。因此,测量结果的分辨率不高、测量过程也比较烦琐。通过条纹投影给被测空间添加二维相位分布,以此来实现对被测物体连续的特征点标记将能够解决上述问题。文章详细介绍了该技术中的相机标定、全局相位求解以及面形复原全过程,可为机器视觉在三维测量中的应用提供借鉴。
关键词:三维测量;相位测量;条纹投影;机器视觉
中图分类号:TP391 文献标识码:A文章编号:2096-4706(2021)16-0093-04
Research on Stereo Measurement Technology Based on Fringe Pattern
Phase Matching
ZHU Ronggang, ZHANG Mintao, ZHU Xia, CHEN Peng
(College of Network and Communication Engineering, Jinling Institute of Technology, Nanjing 211169, China)
Abstract: 3D measurement technology based on multi camera machine vision needs to find feature points on the surface of the measured object. According to the image position corresponding to the feature point in different cameras, the spatial three-dimensional coordinates of the feature point are determined. If the feature points of the measured object are not obvious or there are few feature points, it is necessary to manually paste the marked points as the feature points. Therefore, the resolution of the measurement results is not high, and the measurement process is cumbersome. The two-dimensional phase distribution is added by projecting the fringe pattern to the measured space. In order to realize the continuous feature point marking of the measured object, the above problems can be solved. This paper introduces the whole process of camera calibration, global phase solution and surface shape restoration in detail. It provides a reference for the application of machine vision in three-dimensional measurement.
Keywords: three dimensional measurement; phase measurement; fringe projection; machine vision
0 引 言
基于多相机的三维测量技术,是基于视差原理并利用成像设备从不同的位置获取被测物体的多幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。这种方法具有结构简单、效率高和成本低等优点。适合在线、非接触监测的应用场景。因此,近年来许多学者对此进行了大量研究[1-3]。其中,多数工作集中在对测量系统的数学建模、系统的标定方法[4,5]以及目標特征点匹配算法[6]的研究上,这里又以特征点匹配最为关键,直接影响测量结果的准确性和精确性。因此,本文将采用条纹投影的方法,通过空间相位的唯一性,实现准确匹配,来提高测量精度。
1 原理
这里以双相机条纹投影三维测量为例。如图1所示,其包含条纹投影装置和两套图像采集装置,其中,条纹投影装置用来对被测空间投影条纹图,图像采集装置则负责采集由物体高度调制后的变形条纹图。通过分析两个图像中每个像素点的相位分布,结合相机本身在世界坐标系中的位置,便可确定对应被测点的空间位置。
1.1 相机标定
相机标定的作用是将相机图像坐标系统一到被测空间的世界坐标系中。相机标定包含内参标定与外参标定两个部分。为了简化测量模型、提高标定速度,选取高质量的相机和消畸变镜头,此时相机内参的标定可简化为如图2所示的针孔模型。
相机坐标系中任意一点D(xc,yc,zc)成像于相机靶面图像坐标系u-v中(u,v)点上,而D(xc,yc,zc)是由世界坐标系中的点(xw,yw,zw)经过(R,T)变换而来,最终关系可表示为:
(1)
其中,P11~P34是需要标定的相机参数。
1.2 三维测量
测量过程主要包括条纹投影、相位求解以及面形恢复几个过程。其中,投射何种样式的条纹图是由相位求解算法来确定,面形恢复则是根据前面标定结果以及求解出的相位最终求得。具体过程如以下所示。
1.2.1 条纹投影
测量过程中,我们采用投影正弦条纹的方法,由于正弦条纹在求解相位的时候能够去除背景噪声等对测量的影响,提高测量精度。另外,要实现被测物体空间各点的无歧义特征点匹配,需要在投影仪坐标系中的x方向与y方向分别投影条纹图。
1.2.2 相位求解
相位求解我们采用传统的四步移相法,假设背景光强为I0(x,y),调制度为γ0(x,y),则采集到的投影条纹的光强表示为:
(2)
其中,φ(x,y)为需求相位,包含面型信息。φk(x,y)是可变相位,分别取0、π/2、π和3π/2,对应光强为I0(x,y)~I3(x,y),则有:
(3)
测量过程中我们需要实现相位的无歧义求解,最直接的方法是投影单周期条纹,也即此时λ=1。但是,实际测量过程中由于Gamma效应等各因素,测量精度通常随着条纹频率增加而提高,可以采用外差法来解决该问题。外差法[7]是指两种不同频率的相位函数φ1(x,y)和φ2(x,y)叠加得到一种频率更低的相位函数φb(x,y),λ1、λ2和λb分别为相位函数φ1(x)、φ2(x)和φb(x)对应的频率,φb(x)的频率λb经过计算后可表示为:
(4)
为了在全场范围内无歧义地进行相位展开,必须选择合适的λ1和λ2值,使得λb≥1。
1.2.3 面形恢复
面形恢复过程如图3所示,选取CCD1中任意被测点PCCD1,测得其相位值(φx,φy),通过相位匹配可以获得其在与CCD1中的像素点位置PCCD2,再连接各自相机中心fCCD1和PCCD2,理论上fCCD1PCCD1和fCCD2PCCD2的交点位置Pw就是所需测量的空间位置。但是由于标定过程中多少会引入一定的误差,导致其未必相交,因而无法得到空间位置。根据公式(1),Pw(xw,yw,zw)为所求空间位置点,其即满足CCD1的坐标转换关系,也满足CCD2的坐标转换关系,联立得到如下方程组:
(5)
可以通过最小二乘法求解空间位置Pw(xw,yw,zw),多相机的模式下会增加方程组数量,求解更加精确,但是同时计算速度也会更慢。
2 实验
实验中采用的相机是微视MVC1450m相机,像素为1 390×1 040,投影器选取带PLD芯片的Benq MX503,像素为1 024×768。
2.1 标定
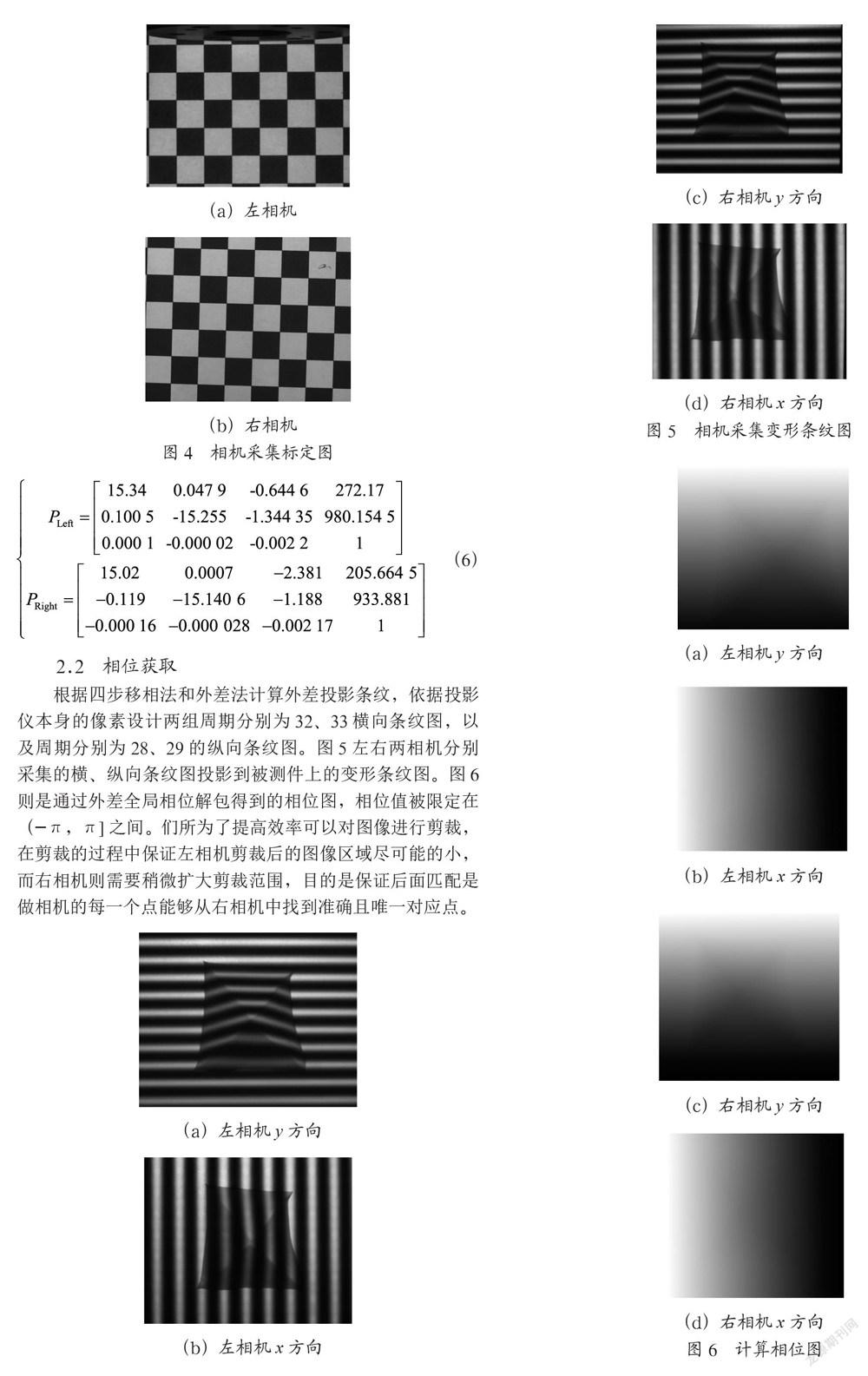
根据公(1),通过标定板上已知点的空间位置和对应的图像位置来标定相机。图4是左右相机分别拍摄一副标定板后得到的图像,上面棋盘格的交点位置表示着图像位置。
为了达到精确的目的,不断按照设定高度升降标定板并采集,实验中通过计算得到左、右相机的标定矩阵分别是:
(6)
2.2 相位获取
根据四步移相法和外差法计算外差投影条纹,依据投影仪本身的像素设计两组周期分别为32、33横向条纹图,以及周期分别为28、29的纵向条纹图。图5左右两相机分别采集的横、纵向条纹图投影到被测件上的变形条纹图。图6则是通过外差全局相位解包得到的相位图,相位值被限定在(-π,π]之间。们所为了提高效率可以对图像进行剪裁,在剪裁的过程中保证左相机剪裁后的图像区域尽可能的小,而右相机则需要稍微扩大剪裁范围,目的是保证后面匹配是做相机的每一个点能够从右相机中找到准确且唯一对应点。
2.3 面形恢复
根据式(5)和图6相位的二维分布,最终复原的被测物体三维轮廓如图7所示,与实际相吻合。
3 结 论
本文通过相位匹配的方法来进行特征匹配,实现多相机机器视觉的三维立体测量。实验结果表明,该方法与传统的机器视觉三维测量方法相比,其能够实现全部可探测像素点的完全匹配,进而可以实现完整的面形恢复。未来,可以在相机标定、亚像素级计算以及快速相位匹配等方面提升该测量方法的性能。
参考文献:
[1] 张业鹏,何涛,文昌俊,等.机器视觉在工业测量中的应用与研究 [J].光學精密工程,2001(4):324-329.
[2] 杨洪涛,何海双,李莉,等.双目立体视觉测量系统的精度分析 [J].传感器与微系统,2020,39(10):58-61+69.
[3] 隋婧,金伟其.双目立体视觉技术的实现及其进展 [J].电子技术应用,2004,30(10):4-6+12.
[4] 邓小峰,姚睿,周翟和,等.工业自动化产品质检中机器视觉系统标定方法研究 [J].测控技术,2014,33(3):144-147.
[5] 蔡健荣,赵杰文.双目立体视觉系统摄像机标定 [J].江苏大学学报(自然科学版),2006,27(1):6-9.
[6] 裴志军,陶建华.一种基于梯度特征列表的机器视觉目标匹配 [J].计算机工程与应用,2008(5):14-16+21.
[7] 王从军,周钢,李中伟,等.一种三频外差相移解相方法:200710052902.X [P].2007-08-02.
作者简介:朱荣刚(1984.01—),男,汉族,江苏大丰人,讲师,博士研究生,研究方向:光学测量和图形处理。
