动态实时导航与数字化导板导航牙种植精确度的比较
2021-02-26赵娅琴刘艾芃岑峰杨凯文李艳芳邓文正
赵娅琴, 刘艾芃, 岑峰, 杨凯文, 李艳芳, 邓文正
1. 梧州市红十字会医院口腔科,广西 梧州(543002); 2. 右江民族医学院口腔医学院,广西 百色(533000);3. 梧州市红十字会医院医学影像科,广西 梧州(543002)
在缺失牙种植修复过程中,种植体的准确植入是成功的前提之一,也是完成高质量修复的重要保证。最佳的三维种植体放置对于种植修复至关重要,可以确保种植牙良好的功能、美学和种植体周围组织的长期健康[1⁃2]。随着数字化种植技术的发展,动态实时导航和数字化导板导航种植技术在临床上应用逐渐广泛,两者均能一定程度上实现牙种植术的微创与精准,弥补传统种植手术的不足[3]。动态实时导航与数字化导板导航种植技术的操作方法、实现原理等方面存在一定的差异[4],而这两种技术的精确度比较报道较少。本研究拟比较分别在动态实时导航与数字化导板导航下植入的种植体位置的精确度,以期为临床导航种植技术的应用提供参考。
1 材料和方法
1.1 主要设备与材料
Mimics16.0(Materialise 公司,比利时),口腔种植手术导航系统(苏州迪凯尔医疗科技有限公司,中国),六维齿科种植导板专业设计软件、数字化种植导板、导板手术器械盒(杭州六维齿科医疗技术有限公司),SO⁃MATOM Definition 螺旋CT(西门子公司,德国),Objet connex350 3D 打印机(Stra⁃tasys 公司,美国),Straumann 种植工具盒、Strau⁃mann 种植体(Straumann 公司,瑞士)。
1.2 研究对象
选择2018 年4 月至2019 年12 月于梧州市红十字会医院口腔科行种植牙手术需植入种植体共70颗(患者46 例),随机分为动态实时导航种植组和数字化导板导航种植组。每组35 颗种植体,均行种植手术植入缺牙区。参与手术的患者年龄19~71 岁,平均年龄(49.76 ± 13.69)岁。纳入标准:①缺失牙超过3 个月的牙列缺损,缺牙区有充足的骨量;②接受应用动态实时导航或数字化导板导航种植技术进行种植修复缺失牙;③全身健康状况良好;④有足够的开口度。排除标准:存在重度牙周病或其他严重口腔疾病者;2 年内接受过头颈部放疗或者正在接受头颈部放疗。本课题经梧州市红十字医院伦理委员会批准(No. LL2018⁃8),患者均签署知情同意书。
1.3 操作方法
1.3.1 动态实时导航种植组 患者术前均安装U型管(配准装置)拍摄CT,拍摄后取下并保存U 型管。由同一医师将CT 数据导入口腔种植手术导航软件三维重建后进行种植体位置设计。常规术前准备并调整导航仪,将其置于距离患者头部前方约1.25~1.5 m,45~60 °角度位置,完成器械连接,进行参考板标定。标定完成后,安装固定装置,并将U 型管完全复位于缺牙区进行配准。配准完成后,进入导航,导航警示阈值设置为位移偏差0.2 mm,角度偏差2°,深度偏差0.2 mm。由同一医师在动态实时导航技术引导下进行种植体植入手术,精确地完成植入孔的预备和种植体的植入。见图1。
1.3.2 数字化导板导航种植组 患者术前均拍摄CT,在六维齿科种植导板专业设计软件中完成种植体位置设计和牙支持式导板设计,将数据导入至成型设备进行导板加工制作。常规术前准备,由同一术者进行导板试戴,就位后确认钻头进入方向与套环方向一致后进行导板固定,在数字化种植导板导航下逐级备洞,完成种植体的植入。见图2。
1.3.3 数据采集 两组患者拍摄术后CT,将术前设计方案和术后CT 数据导入Mimics16.0 软件。术后CT 三维重建后通过整体配准功能将重建模型与植入前模型进行配准。使用系统自带测量工具对术后实际与术前规划种植位置的颈部、根尖部、深度和角度偏差进行测量并记录。测量点取种植体颈部、根尖部横截面的中心点,定点后直接测量两点间的距离,深度偏差值取根尖部二者垂直距离。每一个指标由同一操作者连续重复测量3 次,取平均值。
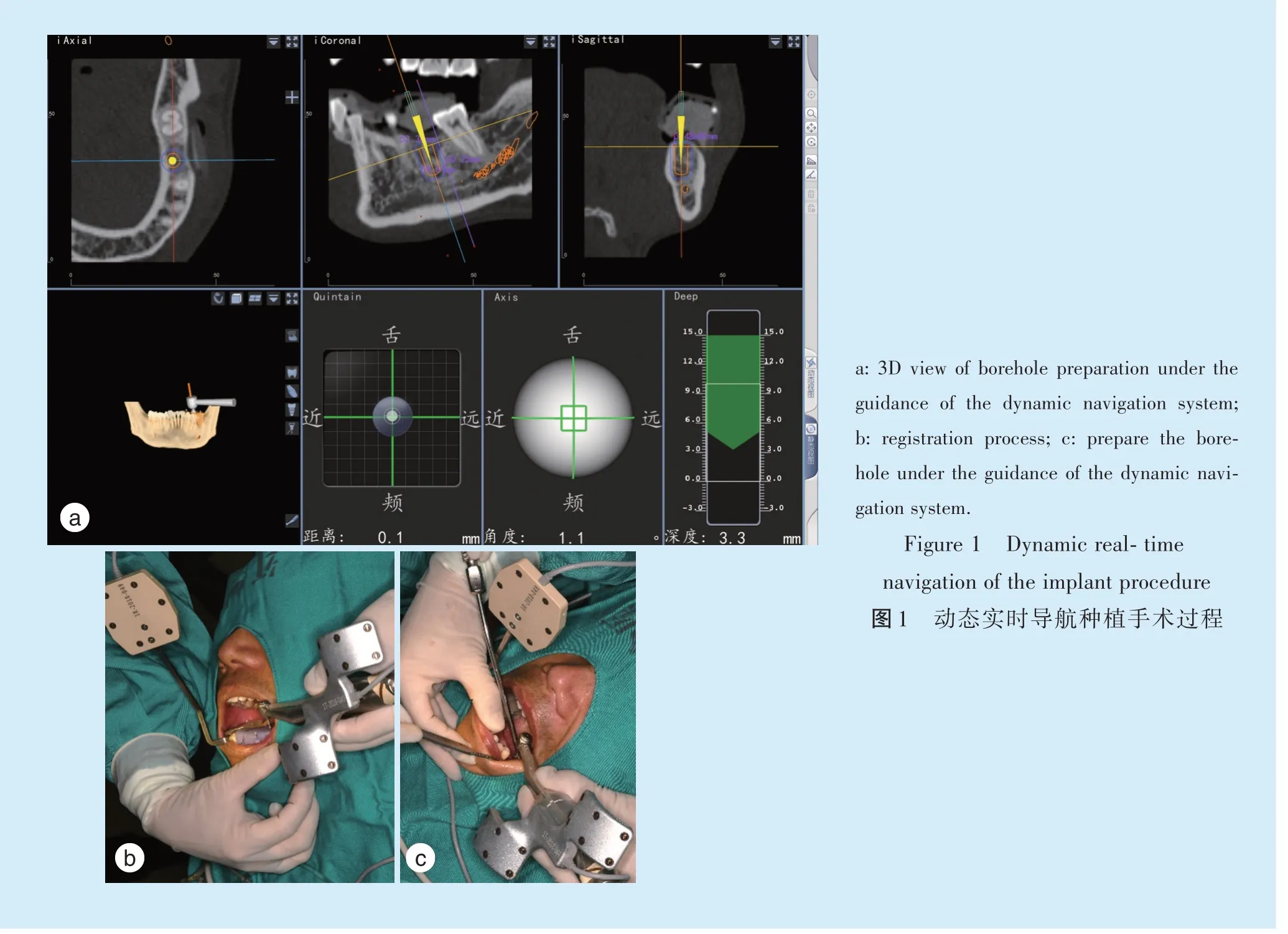
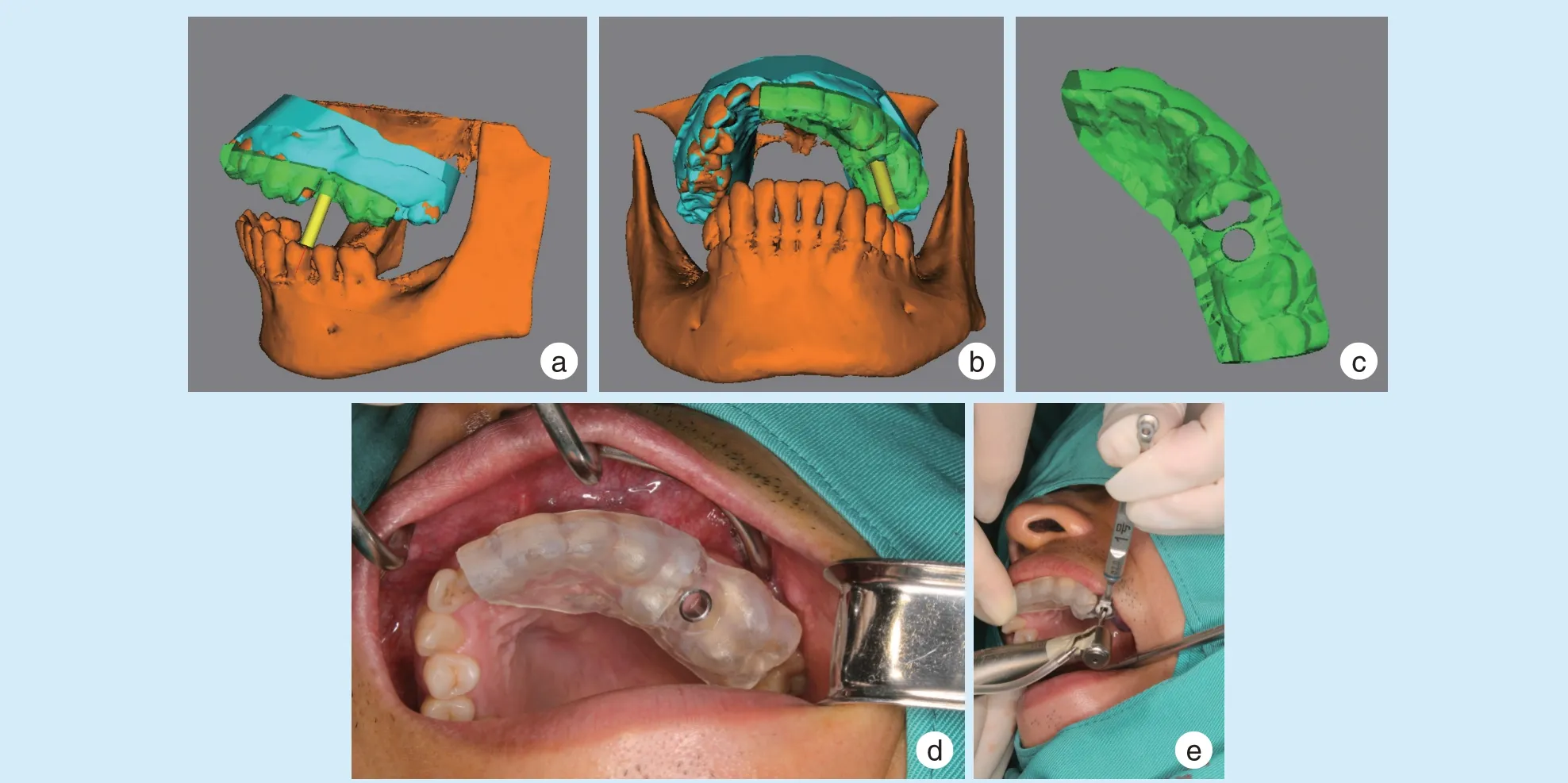
Figure 2 Digital guide of the implant procedure图2 数字化导板导航种植手术过程
1.4 测量指标
记录植体虚拟和实际植入位置的偏差情况:种植体颈部(植体最上缘横轴面)中心点、根尖部、深度的距离偏差(mm)和角度偏差(°)。见图3。
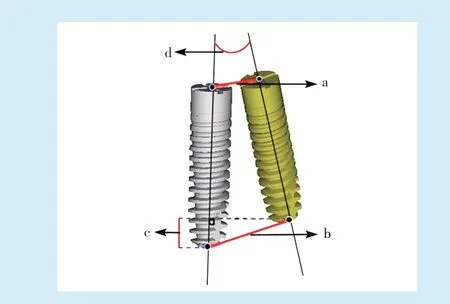
Figure 3 Model of measurement and deviation parameters图3 测量模型图和测量指标
1.5 统计学方法
运用SPSS21.0 软件进行统计学分析,两组病例中的计数资料采用χ2检验进行分析,计量资料用x±s表示,用Shapiro⁃Wilk 检验各组数据的正态性,符合正态分布的两组间均数比较采用完全随机设计t检验进行比较,不符合正态分布的两组间均数采用Mann⁃WhitneyU检验,检验水准α=0.05。
2 结 果
2.1 一般资料与植牙区牙位分布资料
动态实时导航种植组患者年龄19~71 岁,平均(52.18 ± 14.15)岁,男11 例,女11 例;数字化导板导航种植组患者年龄24~70 岁,平均(47.54 ±13.16)岁,男16 例,女8 例。两组患者的年龄和性别组成分别经过完全随机设计t检验和χ2检验进行对比,无显著差异(P>0.05),具有可比性。
动态实时导航种植组植牙区牙位分布:前牙区9 例,前磨牙区12 例,磨牙区14 例;数字化导板导航种植组植牙区牙位分布:前牙区15 例,前磨牙区7 例,磨牙区13 例。经过χ2检验,两组患者的植牙区牙位分布差异均无统计学意义(P>0.05),排除了患者的植牙区牙位分布对本次研究结果的影响。见表1。

表1 两组患者植牙区牙位分布资料分析Table 1 Comparison of positions forimplanteeth data between two groups n=35
2.2 治疗结果
本研究共植入70 颗种植体,每个病例均完成种植体的植入,术后未见明显的不良反应。术后3个月随访率100%,所有种植体良好,未发现种植体周围牙龈炎症和松动等情况,影像学复查结果未见明显的骨吸收。
2.3 相关指标的比较结果
动态实时导航种植组的种植体根尖部、深度和角度偏差均小于数字化导板导航种植组,差异均具有统计学意义(P<0.05);两组种植体颈部中心点偏差差异无统计学意义(P>0.05)。见表2。
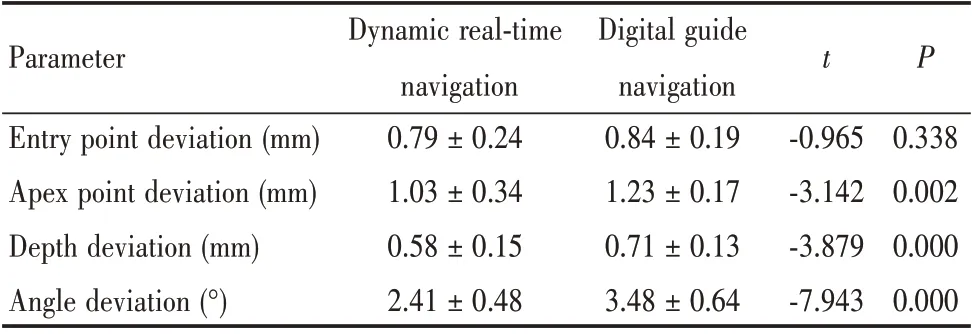
表2 两组种植体偏离程度相关指标比较Table 2 Comparison of various parameters of the accuracies between two groups x±s
3 讨 论
目前数字化种植导板应用于临床越来越常见;相对于传统自由手种植方法,数字化导板导航种植技术能控制钻孔的位置和深度,减少下牙槽神经损伤等风险[5];但其仍存在一定的局限性,如种植导板的支持方式选择、冷却障碍、视野受限、不支持动态调整设计以及导板厚度占据操作空间等[6]。动态实时导航种植技术的发展拓宽了精准种植的适用范围;其与种植手术的结合,能够在不影响冷却的情况下监控钻针三维位置与重要解剖结构的位置[7],尤其适合局部解剖条件复杂、种植部位深在的种植病修复例[8⁃9]。目前国内动态实时导航种植技术的设备一次性投入大,相对数字化导板导航种植技术临床应用不多,关于动态导航相关的文献也多为疑难病例汇报。
研究表明,当严格选择病例、合理设计和谨慎操作时,采用数字化导航种植技术的成功率与传统自由手种植方式相比无明显差异[10]。本研究采用动态实时导航和数字化导板导航种植技术实施种植手术,采用随机化方案,由同一名口腔医师在相同环境下实施,有效消除选择性偏差和控制实验的可变因素[11]。为了尽量减少误差,术者与主要操作者均经过专业培训和试验操作,满足学习曲线要求后开展试验。本研究两组种植手术过程均顺利,术后种植体位置与术前种植体设计位置在种植体颈部、尖端、深度的平均距离偏差低于种植安全范围,角度偏差低于4°,该结果与Tahmaseb等[12]在1 530 颗种植体中测得的种植体平均偏差安全范围相当,说明动态实时导航种植与数字化导板导航种植具备临床应用安全性和较高的精确性。
尽管目前动态实时导航及数字化导板导航较自由手种植技术有更高的精确性,但两者在临床应用过程中仍然会产生一定的误差。Kaewsiri等[10]研究数字化导航种植在单颗牙缺失位点植入种植体的精确度,结果显示,数字化导板组种植体颈部和种植体尖端偏差分别为(0.97 ± 0.44)mm 和(1.28 ± 0.46)mm,角度偏差为(2.84 ± 1.71)°;动态实时导航组颈部偏差(1.05 ± 0.44)mm,根尖偏差(1.29 ± 0.50)mm,角度偏差(3.06±1.37)°。Block等[5]评估了478 例涉及714 个种植体的患者的前瞻性数据,对于动态实时导航,平均角度偏差为(2.95 ± 0.25)°,平均总体平台位置偏差为(1.15 ±0.06)mm,平均总体尖部位置偏差为(1.28 ± 0.07)mm,提出使用动态导航可以实现种植体植入的准确性和精确性。Van Assche 等[13]对数字化导板系统的研究结果显示种植体颈部平均误差0.99 mm、根方平均误差1.24 mm、角度平均误差3.81°。本研究中的动态实时导航和数字化导板导航种植的偏差与以上研究相似。
动态实时导航和数字化导板导航种植手术均由系统的流程组成,因此在这个临床应用过程中任何一个环节产生的误差都将对手术整体的精确度有影响。动态实时导航种植的误差来源主要包括:术前CT 的拍摄、导航系统软件的内部参数设定、标定和配准过程以及术者在手术中的操作表现[8]。数字化导板导航种植的误差来源主要包括:术前CT 的拍摄、模型的制取、导板的设计、固定和术者操作表现[14⁃15]。
本研究结果显示,两组种植技术术前术后植体的颈部偏差无明显差异,而根尖偏差、深度偏差和角度偏差有显著性差异,原因可能是角度的偏差导致的根尖及深度的偏差。无论是动态实时导航组还是数字化导板导航组均能有效控制种植体植入点的位置[16]。
Block 等[5]在前瞻性研究中合并不同术者动态导航辅助下植入种植体精确度发现不同术者之间唯一的区别就是角度偏差;因此,无论何种技术,角度偏差尤为重要,合适的种植体轴向能降低后期修复及种植体的护理的复杂度。
此外,本研究还发现数字化导板导航组的角度误差较大,且基本分布在后牙,动态实时导航组的此方面数据差异相对较小。这可能是由于后牙区数字化导板导航辅助种植的种植体精度易受导板厚度占用开口度空间的影响而导致后牙区植入时角度偏斜。本课题组前期研究对比上颌前牙及上颌第一磨牙行数字化导板导航辅助种植的种植体精度,发现上颌前牙组的角度偏差为(3.25 ±0.51)°,上颌第一磨牙组的角度偏差为(3.89 ±0.64)°,上颌前牙组的角度偏差较上颌第一磨牙组小,差异有统计学意义[17],与本研究结果相近,提示在数字化导板导航的应用过程中不能忽视导板的厚度对后牙区种植体精度影响。Block 等[5]也在动态导航种植和自由手精度对比研究中发现,动态导航种植中使用常规手术器械可用于第二磨牙区域和开口受限的患者,以减少下牙槽神经或种植体撞击邻近牙根的并发症;该研究还提出与数字化导板导航相比,动态导航系统不需要特殊的钻孔系统或手术器械,且因为种植医师可以在监视器上看到手术,所以医师可以保持良好的姿势,降低医师疲劳程度。综上,数字化导板导航种植技术可尽量应用于开口度佳操作空间足的病例中,而难度较大操作空间受限的病例可适当选择动态实时导航种植技术以减小后牙区种植体的角度偏差,减低后期种植修复和种植护理难度。
数字化导板导航的种植精确度不如动态实时导航,但数字化导板导航种植技术一次性投入较少,在基层临床较易开展应用;动态实时导航系统具有微创、精准、安全、实时的优点,是未来数字化种植技术发展的方向。
【Author contributions】Zhao YQ processed the research and wrote the article. Liu AP processed the research and revised the article. Cen F reviewed the article. Yang KW and Li YF collected,processed and analyzed the data. Deng WZ designed the study and reviewed the arti⁃cle. All authors read and approved the final manuscript as submitted.
