CBTC系统中列车占用位置判断方法
2021-02-24赵鹏,耿鹏
赵 鹏,耿 鹏
(通号城市轨道交通技术有限公司,北京 100070)
城市轨道交通中CBTC系统(communication based train control,基于通信的列车自动控制系统),实现了车-地双向、实时、大容量的数据传输,在保证运行安全的基础上,提升了运营效率。CBTC信号系统中车载控制器(以下简称 VOBC)通过速度传感器和雷达实时检测并计算列车位置[1],将位置信息周期性地发送给地面区域控制器(以下简称 ZC),ZC根据列车位置信息,并结合计算机联锁(以下简称CI)提供的站场信息实现列车追踪。当车地通信故障导致ZC无法获取列车位置信息时,ZC依赖CI发送的计轴占用状态判断列车占用位置,作为对位置报告检测方法的有效补充,提高了系统的可用性[2]。
ZC计算列车占用位置时,不能直接使用 VOBC发送的位置信息,必须考虑VOBC与ZC、CI与ZC之间存在的通信延时以及信息不同步问题。目前主流的实现方法是ZC收到VOBC发送的位置信息后,将VOBC与ZC间最大通信延时时间内估计的列车运行距离,以及列车退行时产生的尾部最大可能位置,作为该列车最大可能的包络范围[3]。当车地通信中断后,ZC若收到CI发送的计轴区段为占用状态,需考虑CI与ZC之间存在通信延时,不能认为非通信列车一定在“占用”的计轴上,也可能在前方或后方相邻“空闲”的计轴上,此时,“占用”计轴和“空闲”计轴均是列车可能的运行范围。后方CBTC列车进行追踪时,移动授权不能延伸进入“空闲”的计轴内。该方法在判断列车占用位置时保证了安全性,但一方面存在列车占用位置计算精度低的问题,尤其是CBTC混跑模式下效率较低,难以适应更小间隔、更高速度的线路应用需求[4];另一方面存在可能将计轴设备故障(以下简称ARB)识别为非通信列车占用的问题。因此,现提出一种新方法实现列车占用位置判断,对其进行改进。
1 轨旁控制设备融合
在目前设备分离设计的情况下,分布式“串联”通信会给系统造成不利影响。以计轴占用状态传输为例。ZC获取计轴状态信息需要经历计轴继电信号采集时间、CI驱采单元采集时间、CI驱采单元至逻辑部通信时间、CI逻辑部处理时间、CI以太网板至ZC逻辑部时间,时间累计可达到“秒”量级[5]。
设备间存在通信延时是判断列车占用位置必须考虑的因素,由于轨旁设备控制方式分离,缺乏统一的时钟基准,因此若要提高列车占用位置判断精度,必须尽可能减少网络延时。轨旁控制设备ZC实现对列车的连续式控制,CI实现后备模式控制,这两个设备从对外接口以及功能上具备融合的条件[6],因此将ZC与CI进行融合,称为新型区域控制器(以下简称TCS)。设备融合后,简化了系统构造与接口,促使原分配在不同设备上的系统功能更加协调,ZC与CI之间的通信延时消失,计轴设备的传输延时仅存在于继电信号采集与TCS逻辑部之间,现基于ZC和CI设备融合基础上,对列车占用位置判断方法进一步分析。
2 列车占用位置判断
当TCS与VOBC通信正常时,TCS采用 VOBC发送的位置报告信息进行列车追踪;当TCS与VOBC通信中断后,TCS无法获取列车位置,需要依靠计轴占用状态进行位置判断[7]。因此对通信列车和非通信列车的占用位置判断方法分别进行阐述。
2.1 通信列车
当VOBC向TCS汇报位置信息后,由于车地之间存在通信延时,TCS对该位置信息进行处理时,列车可能已经不在原来的位置,所以需要TCS在列车当前位置的基础上,向前或者向后延伸一段距离,作为列车最大可能的包络范围,使其他列车根据该包络范围进行追踪[8],如图 1所示。向后延伸的距离通常为最不利情况下列车退行距离,向前延伸的距离计算公式如下:

图1 通信列车Figure 1 Communication Train

式中:ldis为列车的头部最大可能位置;vmax为列车最高运行速度;tvobc-tcs为车地最大通信延时时间。
2.2 非通信列车
若车地通信中断导致 TCS无法获取列车位置信息,则 TCS只能根据计轴占用状态判断列车占用位置。考虑通信延时以及信息不同步问题,对如下场景分别进行考虑。
假设计轴占用状态由继电信号采集至 TCS逻辑部的延时为tstde,列车最高运行速度为vmax,列车最短车长为ltrain,当前占用的计轴长度为lstde,列车悬垂长度为lxc,TCS至VOBC最大通信延时时间为ttcs-vobe,列车紧急制动加速度为aeb。
1) TCS与VOBC通信中断前,TCS存储了列车的位置信息和运行方向,当VOBC判断通信中断后施加紧急制动并且停车,TCS应考虑这段时间内列车实际运行的距离。因此应在存储的最后有效位置信息基础上向前和向后分别延伸一段距离,作为列车最大可能的包络范围,如图2所示。向后延伸的距离通常为最不利情况下列车退行距离。向前延伸的距离计算公式为
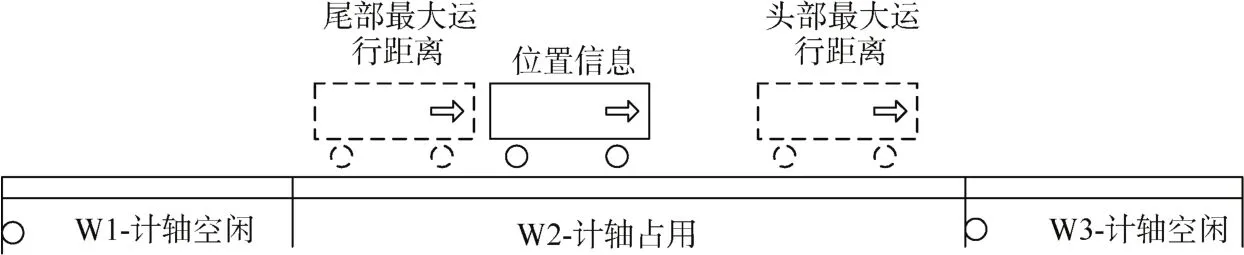
图2 通信列车降级Figure 2 Non-communication Train

2) 列车降级并且施加紧急制动停下来之后,TCS无法确定该非通信列车的状态,列车可能继续前进,也可能保持静止,因此需要依靠计轴占用状态判断非通信列车的可能运行范围。如图3所示,当非通信车所在计轴W2占用,相邻计轴W1和W3均为空闲时,由于计轴设备继电信号采集至 TCS逻辑部之间存在通信延时,列车实际位置可能在空闲的计轴内。因此以W2左侧端点为起点,向后考虑最不利情况下列车退行距离,以W2右侧端点为起点,向前考虑获取计轴设备占用状态最大延时时间内列车运行距离vmax×tstde作为列车最大可能的包络范围。

图3 非通信列车占压一个计轴Figure 3 A single axle counter occupied by a non-communication train
3) 当非通信车继续前行顺序占压两个计轴时,如图4和图5所示,根据占压顺序,将W2定义为驶出计轴,W3定义为驶入计轴。对于驶入计轴W3,考虑列车最后轮对刚刚驶出计轴W2,由于W2存在延时,TCS依然收到W2为占用状态,因此非通信列车向前可能运行范围为

图4 驶入计轴的可能运行范围Figure 4 The possible range of a driving-in axle counter

图5 驶出计轴的可能运行范围Figure 5 The possible range of a driving-out axle counter

对于驶出计轴 W2,考虑列车第一轮对刚刚驶入计轴 W3,此时列车退行,由于W3存在延时,TCS依然收到W3为占用状态,因此非通信车向后可能运行范围为

经过Tstde时间后,若计轴W2和W3依然保持占用状态,则TCS无法确定非通信列车的状态,以W2左侧端点为起点,向后考虑最不利情况下列车退行距离,以W3右侧端点为起点,向前考虑获取计轴设备占用状态最大延时时间内列车运行距离vmax×tstde作为列车最大可能的包络范围。
4) 当 TCS收到驶入计轴为占用状态,驶出计轴为空闲状态时,如图6所示。非通信列车最后轮对刚刚驶出计轴 W2至第一轮对刚刚驶出计轴W3的时间为

图6 列车完全驶入下一计轴Figure 6 The train fully driving into the next axle counter

考虑计轴 W2占用传输延时,最不利情况下TCS认为非通信列车最后轮对刚刚驶出计轴W2至第一轮对刚刚驶出计轴W3的时间为

则从TCS收到计轴W2由占用状态变为空闲状态时刻,T2时间内该非通信车向前一定不会超出计轴W3范围,向后考虑列车最大退行距离,作为列车可能的运行范围。
5) 经过T2时间后,TCS无法确定非通信列车的状态,则以计轴W3的左侧端点为起点,向后考虑最不利情况下列车退行距离,以计轴W3的右侧端点为起点,向前考虑计轴占用最大延时时间内列车可能运行范围vmax×tstde作为列车最大可能的包络范围,如图7所示。

图7 非通信列车占压一个计轴Figure 7 Single axle counter occupied by a non-communication train
综上所述,TCS以存储的与VOBC通信中断前的最后有效位置和运行方向为基准,通过计轴设备的占用顺序对非通信列车的占用位置进行管理,在保证安全性的基础上提高了系统效率。
3 方案对比
通过实验对改进方案与原方案进行比较,其中,各延时参数取值为最大延时时间。计轴占用状态由继电信号采集至TCS逻辑部延时时间tstde=3 s;列车最高运行速度vmax=33 m/s;最短运营列车车长ltrain=60 m;计轴W1、W2、W3、W4的长度均为lstde=500 m;列车悬垂长度lxc=3.32 m;TCS至VOBC最大通信延时时间ttcs-vobc=6 s;列车紧急制动减速度为aeb=1.2 m/s2;最不利情况下列车退行距离为15 m。
根据以上数据对列车运行过程进行分析。列车在计轴W2上以CBTC等级运行时,向TCS发送的车尾和车头的位置报告记为[(W2,30 m),(W2,100 m)],计轴偏移量按照从左向右方向描述,则考虑车地通信延时因素,TCS计算的列车包络范围为[(W2,15 m),(W2,298 m)]。
当发生车地通信中断,记为T1时刻,TCS存储的最后一包接口有效位置为[(W2,30 m),(W2,100 m)],列车施加紧急制动并且停下来经历的时间Δt1=27.5 s。则考虑车地通信延时因素,当TCS判断通信中断后,Δt1时间内,计算的列车包络范围为[(W2,15 m),(W3,251.75 m)]。
Δt1时间后,记为t2时刻,若计轴 W3保持为空闲状态,则考虑计轴占用采集延时因素,TCS计算的列车包络范围为[(W1,485 m),(W3,99 m)]。
非通信车继续前行至同时占压W2和W3,记为t3时刻,则在计轴出清采集最大延时时间 3 s内,TCS计算的列车包络范围为[(W2,428.32 m),(W3,155.68 m)]。
经过计轴出清采集最大延时时间后,记为t4时刻,若计轴W2和W3依然保持占用状态,则列车可能停在该位置或者计轴故障占用。从安全角度考虑,TCS计算的列车包络范围可为[(W1,485 m),(W4,99 m)]。
非通信车继续前行至W2空闲时,记为t5时刻。则非通信列车最后轮对刚刚驶出计轴W2至第一轮对刚刚驶出计轴W3的时间Δt2=10.5 s。Δt2时间内,TCS计算的列车包络范围为[(W3,0 m),(W3,500 m)]。
Δt2时间后,记为t6时刻,TCS无法确定非通信车的状态,则考虑计轴占用采集延时因素,TCS计算的列车包络范围为[(W2,485 m),(W4,99 m)],重复上述t2时刻过程。
当计轴 W4占用时,记为t7时刻,重复上述t3时刻过程,以此类推。
上述为通信列车降级至非通信列车顺序走行的完整周期。对于正常通信列车,原方案和改进方案对列车占用位置判断无区别。列车降级后,原方案将非通信车占用计轴以及前后相邻计轴均作为列车可能占用位置,改进方案明显提高了列车占用位置精度。对比分析见表1。

表1 列车占压范围对比Table 1 Comparison of train occupation ranges m
表1中,“占压范围”指的是列车可能占用位置的区间长度。在计轴长度均为500 m情况下,改进方案对列车占用位置的判断精度提高了44.3%。列车占用位置精度提高后,后方CBTC列车追踪间隔更加紧密,同时可以提高计轴ARB判断准确度。其中,后车MA安全防护点回缩距离和计轴ARB判断对比分别见表2和表3。

表2 MA 回缩距离对比Table 2 Comparison of movement authority retraction distances m

表3 ARB 判断对比Table 3 Comparison of ARB justification
表2中,“MA回缩距离”指的是后方CBTC列车MA安全防护点距离前方第一个非通信车占用计轴的距离。原方案中,后车MA安全防护点与前方非通信车占用计轴间隔一个空闲计轴。改进方案后,后车MA安全防护点可延伸进入非通信车占用计轴,为了防止发生MA回缩,可统一将后车MA安全防护点延伸到前方第一个非通信车占用计轴入口处,并回缩列车最大退行距离。
表3中,“ARB判断”指的是能否识别计轴故障占用状态。通过方案对比,改进方案可提高 ARB判断的准确度,提高系统的可用性。
4 思考与展望
在判断非通信列车的可能占用位置时,受通信延时影响,现有技术方案中将占用计轴的两侧空闲计轴均作为非通信列车可能运行范围,现对该方案进行了改进,提出了非通信列车占用位置的精细化管理方法,一方面可提高列车追踪效率,另一方面可提高计轴ARB判断的准确度[9-10];提出将ZC和CI设备进行融合,主要是为了减少网络延时,即使分离控制,计算方法依然适用。除此之外,在阐述列车降级时,仅考虑了网络通信中断原因和一列CBTC车降级的场景,从安全角度考虑,ZC认为列车降级时刻至VOBC真正降级,还应考虑双向通信延时时间。比如VOBC->ZC方向数据链路发生阻塞,ZC->VOBC方向数据链路正常,则ZC判断通信中断后,VOBC仍需等待通信超时时间后才会真正降级,因此公式(2)应考虑2倍车地通信超时时间。当一个计轴内同时存在多列CBTC车降级时,位置管理更为复杂,从安全角度考虑,此场景可按原方案处理。因此,对列车占用位置的精细化管理还需要进行更深入地研究。
5 结语
城市轨道交通CBTC系统实现了列车移动闭塞模式追踪,提高了列车运营效率,但是也存在一定的问题。如何进一步提高列车运营速度,设备故障后如何降低对运营的影响等,是需要考虑的问题。笔者从轨旁控制设备融合以降低网络延时,列车降级后精细化管理列车占用位置两个方面进行了阐述,对提升CBTC系统的可靠性与可用性具有一定的参考价值。