汽车防追尾报警装置的设计与仿真
2021-02-23张弛,高权
张 弛,高 权
(苏交科集团股份有限公司智能交通设计研究所, 江苏 南京 210017)
汽车高速行驶时,在雨、雪天气很容易发生制动侧滑,在雾天、夜间等视线不良的情况下行车时容易导致追尾碰撞事故,调查表明高速公路追尾碰撞发生次数约占总事故次数的33.4%,造成的经济损失约占总量的40%.对公路交通事故的分析表明,造成事故的主要原因是驾驶员不能对车辆之间的安全距离作出准确判断,尤其是大雾天或夜间,当发现问题紧急制动时,车辆间距离已小于安全制动距离,特别在高速公路上,车辆行驶速度快,交通追尾所造成的交通事故居多.因此,研究开发性能优秀、安全系数高的汽车防追尾预警装置对降低交通事故发生率具有重要意义.
在多雨、多雾的条件下,路面湿滑,可见度低,驾驶条件差,汽车的制动反应距离长,易发生汽车追尾事故.行车安全路线是指同一车道前后车保持正确的方向和适当的距离,在保证后端不会发生事故的同时不减少交通量[1].目前,我国高速公路采用基于汽车闭塞的高速公路通信控制方式实现对先行车辆的安全和高速无间隔移动运行控制,其采用的通信控制方式根据通信技术而议[2].
1 安全行车防追尾装置设计
1.1 制动距离分析
驾驶员在雨雾等恶劣天气下行车时,由于路面湿滑以及可见度降低,导致汽车的制动反应距离逐渐加大,易引起严重的交通事故,需准确分析汽车安全制动反应距离问题.通常情况下,汽车制动时间包括制动器反应阶段Ta、减速度增加阶段Ts、驾驶员实际反应阶段Tr以及持续制动阶段Tv.假设自车当前速度为Va,减速度为a,前后车的实际距离为d,那么实际最小刹车制动距离X1应为:
(1)
根据汽车上的车载雷达可以在行驶过程中计算出前方车辆应有的速度及其加速度,并对该车下一个时间段内的运动速度条件进行预测.假设前车速度为Vt,加速度为at,运动时间为t,那么前车运动距离X2应为:
(2)
为保证行车安全,防追尾安全距离应该满足:
d>X1-X2+d0
(3)
式中,d0为两车之间最小的安全驾驶距离,通常车距可以缩小到1.5~3.0 m.
利用安全距离模型可以分为三种驾驶状态:
1) 正常驾驶状态,d>X1-X2+2,该状态表示与前车保持安全距离;
2) 提醒报警状态,X1-X2+2>d>X1-X2+1.5,该状态为潜在风险阶段,应提醒驾驶员注意前方车辆;
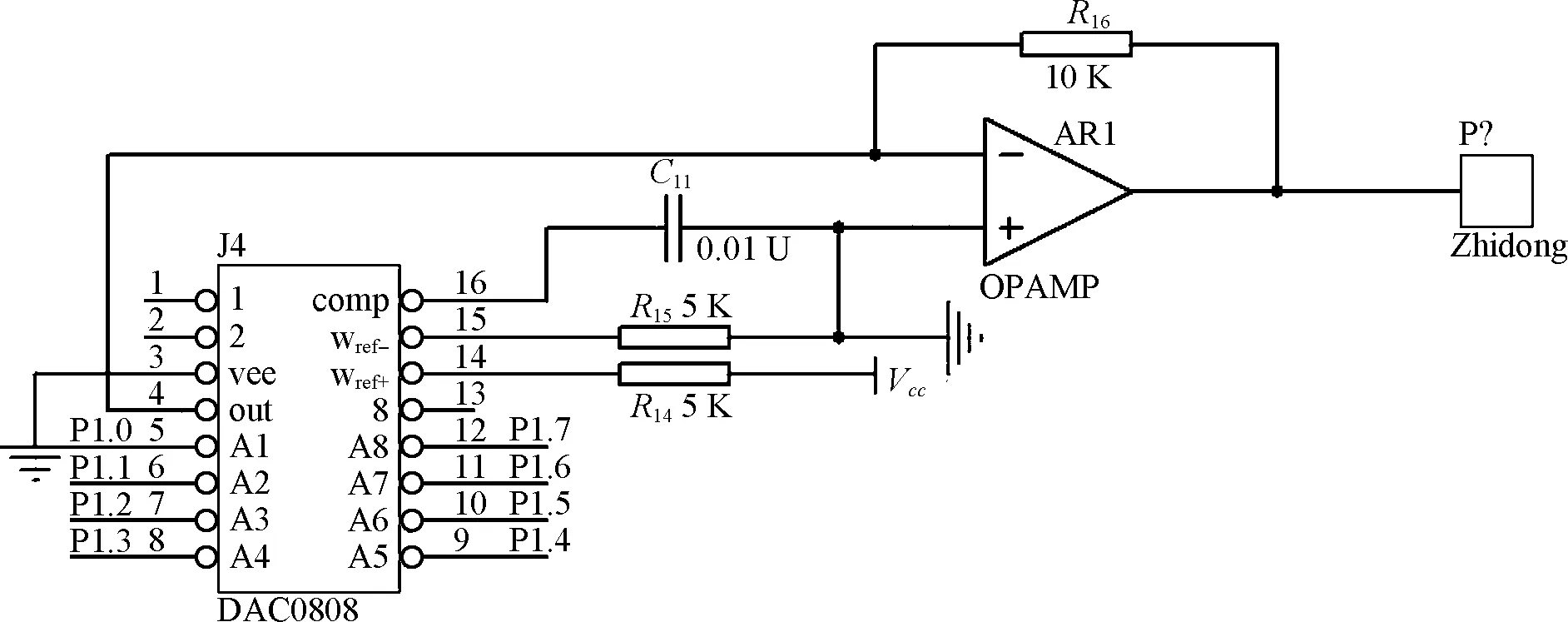
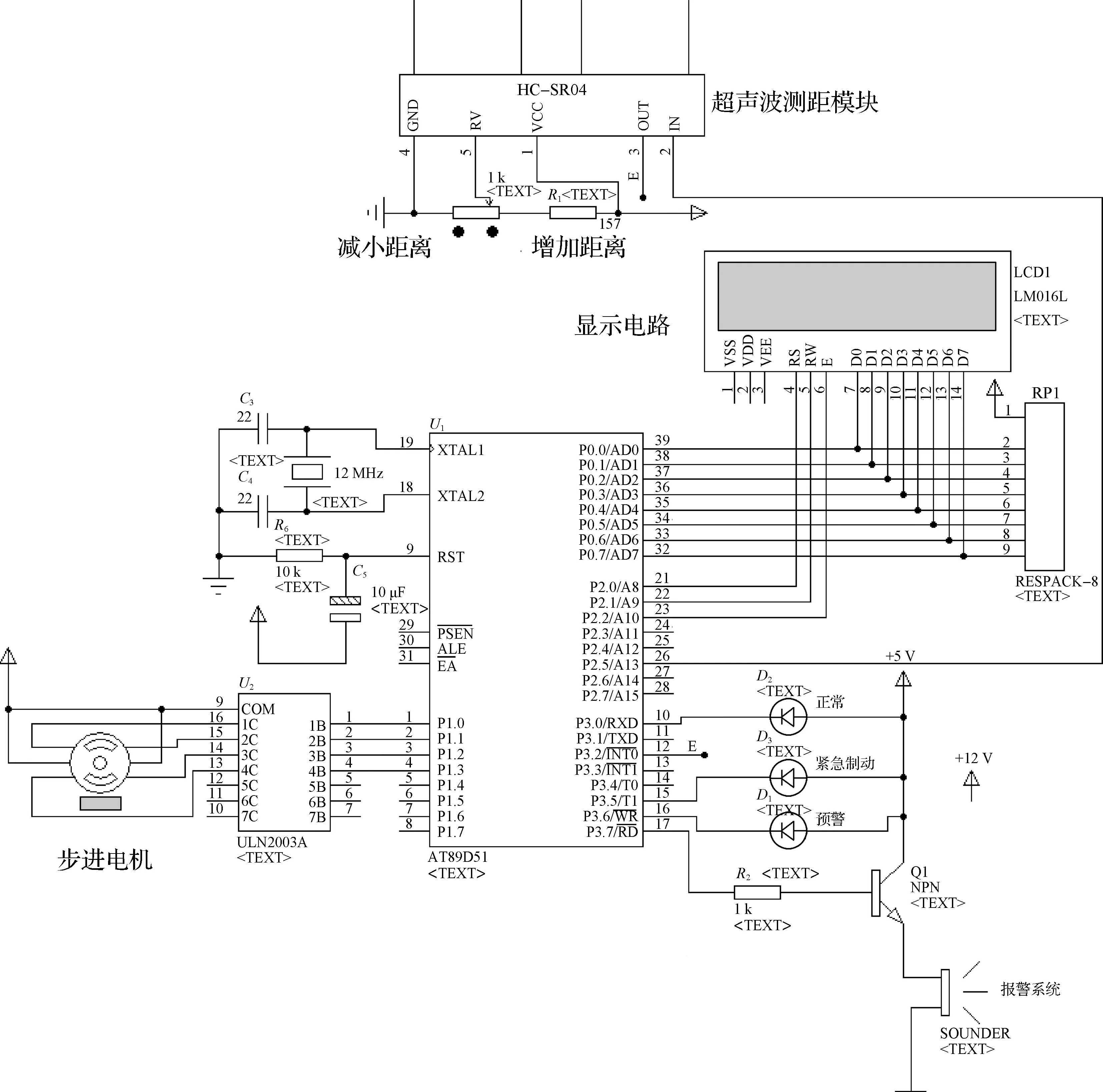
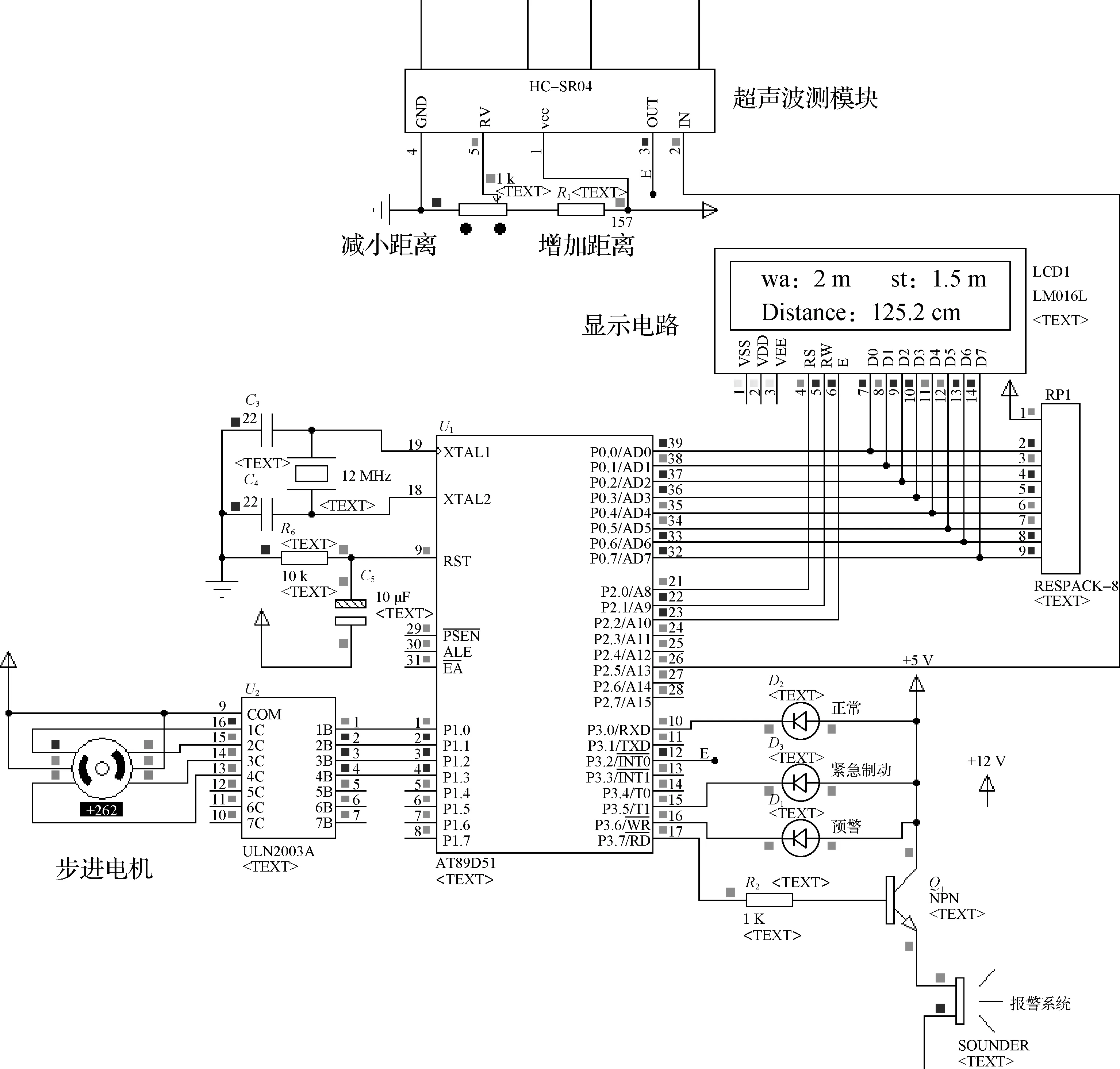
3) 危险报警状态,d 汽车防追尾技术首要解决的问题为汽车间安全距离的测量,如果汽车与汽车之间的距离超过安全距离,应及时触发警报并采取制动措施.目前常见的测距方法有超声波测距、激光测距、CCD摄像系统测距以及雷达测距等[3]. 本设计采用超声波测距,使用555定时器来形成多谐波振动波,以生成频率为40 kHz的方波[4],在三引脚的辅助下方波连续输出,由单片机控制脉冲的产生. 超声波测距基本原理为:由超声传感器检测到的超声能量产生的非线性超声回波被遇到的不可见障碍物散射,然后被照射物体完全反射. 基于超声波从发射到接收的时间T,可准确计算出相应距离: S=CT/2 (4) 式中:S为汽车与障碍物之间的距离;C为超声波在空气中的传播速度. C与温度有关,如温度变化不大,则可认为声速是基本不变的.如果测距精度要求较高,则应通过温度补偿的方法加以校正. 第一次超声波发射过程如图1所示,第二次超声波发射与第一次相同,通过中断计时器进行距离计算.设第一次发射与第二次发射的时间间隔ta=1 s,则(S1-S2)/ta=v相对. 当安全指示参数值S1-S2<0时,安全指示灯为绿色;当安全指示参数值S1-S2>0时,通过计算车辆的安全制动距离和车辆的安全制动行驶速度来引入安全系数W=S/v,W可以通过数值方式查询数值关系,得到如表1所示的参考数据. 表1 各路段安全距离与速度 高速公路上的安全系数W1=S/v=180/120=1.5;普通公路上的安全系数W2=S/v=15/30=0.5.汽车防追尾装置设置为:在高速公路上,当W>1.5时,报警、黄灯亮,当W<1.5时,红灯亮,减速或紧急刹车;在普通公路上,当W>0.7时,报警、黄灯亮,当W<0.7时,红灯亮,减速或紧急刹车. 1.3.1 超声波发射电路 1) 超声波信号产生和发射的电路系统由超声波信号产生电路和超声波信号控制电路两部分组成,如图2所示.本设计采用HC-SR04超声波测距模块,该模块采用IO-TRIG触发测距,给至少10 μs的高电平信号,模块自动发送8个40 kHz的方波,自动检测是否有信号返回;有信号返回,则通过IO-ECHO输出一个高电平,电平持续的时间就是超声波从发射到返回的时间.本模块使用方法简单,一个控制口发一个10 μs以上的高电平,就可以在接收口等待高电平输出;一旦有输出便开启定时器进行计时,当接收口变为低电平时读取定时器的值,由此计算出距离. 图2 基于超声波原理的发射装置设计 2) 超声波发射电路通过555可控电路系统与外围振荡变阻器相连,可控制电路板,形成40 kHz多谐超声波综合控制电路元件.由555定时器和外接元件R1、R2、C构成多谐振荡器,脚2与脚6直接相连.电路没有稳态,仅存在两个暂稳态,电路亦不需要外接触发信号,利用电源通过R1、R2向C充电,C通过R2放电,使电路产生振荡.电容C在2/3Vcc和1/3Vcc之间充电和放电,从而在输出端得到一系列的矩形波.555多谐振荡器输出相关参数计算: tW1=(R1+R2)Cln(Vcc-VT+)/(Vcc-VT-) (5) tW2=R2Cln(0-VT+)/(0-VT-) (6) T=(R1+2R2)Cln2 (7) f=1/T=1/(R1+2R2)Cln2 (8) 式中:tW1为Vcc由1/3Vcc缓慢上升到2/3Vcc所必需的工作时间;tW2为整个电容Vcc在555控制电路中所需要的放电时间;R1和R2为定时器的电阻,不应小于1 kΩ,但两者之和应不大于3.3 MΩ. 计时器组件每个外部控制电路信号的稳定性将影响多谐振荡器整个电路中信号的稳定性,所以可以配置一定数量的定时器来中断或使用. 1.3.2 超声波信号接收 汽车防追尾警示装置接收电路的超声波接收探头采用RCT40.将cx2016a半导体集成电路模块用作超声波检测接收设备的总体集成电路模块,可对接收到的超声波进行放大、滤波. 1.4.1 声光报警电路设计 采用蜂鸣器作为汽车防追尾系统的声音警示装置,通过改变端口输入电平的方向和高低来控制电路进行发声,蜂鸣器根据晶闸管端口输入的电压和频率发出声音,蜂鸣器用直流电流运行,报警装置设计图如图3所示. 图3 报警装置设计图 采用LCD1602液晶显示器作为信号显示装置.LCD面板的结构比较脆弱敏感,不会单独使用,而是与电源电路连接,与综合控制电路组合到一个功能模块中[5].显示电路连接图如图4所示.由图4可见:VSS连接到电源开关接地;电源线连接到电源开关;D0—D7连接到控制器的I/O口,用于显示综合数据;BLA和BLK用作环境背光电源插头的外部接口,连接到相应的电源端口;V0连接到一个10 kΩ电阻值.因为控制器最大电流强度只有20 mA,所以在D0和D7之间连接1个10 kΩ的上拉电阻r,当控制器引脚板总是显示电平为低时,上拉串联电阻相当于接地,相应的引脚显示为低电平[6]. 图4 显示电路连接图 1.4.2 控制器电路设计 控制电路原理如图5所示.对由汽车速度及汽车和障碍物之间距离所得的安全系数进行比较,由单片机输出高低电平,经过DAC0808的A1—A8输入,4脚输出的模拟信号由运算放大器进行放大,刹车系数越大,制动强度就越大,从而达到刹车的目的.其他相关数据见表2. 表2 数模转换数据 图5 控制电路原理图 处理器系统通过单片机AT89C51进行设计,脉冲波从P3.0端口连续发射,为超声波换能器的启动提供动力.超声波检测计时后,利用定时器的计算功能完全记录发送和接收超声波所需的时间.当接收到超声波能量时,可以在接收电路系统的输出端控制该过渡信号的输出,并且不会在INT0端产生强迫中断的强信号造成时间差.超声波控制计算中断程序实现的流程如图6所示. 图6 超声波控制及计算车距流程图 处理系统通过单片机控制接收并显示两车的距离,若两车距离大于行驶速度下的安全距离,绿灯亮;若两车距离小于行驶速度下安全距离,则需要计算安全系数,安全系数大于1.5则报警、黄灯亮;安全系数小于1.5则红灯亮,提醒司机刹车或减速.车速控制流程如图7所示. 图7 车速控制流程图 通过调用距离计算子程序设定安全工作方式,将工作设为1,不工作设为0.若在安全距离之内,蜂鸣器打开报警,否则蜂鸣器不工作. Proteus软件具有强大的原理图绘制功能,能够实现单片机仿真与SPICE电路仿真的结合,具有模拟电路仿真、数字电路仿真、MCU及其外围电路系统仿真、RS232动态仿真等功能[9]. 如图8所示,防追尾警示装置包含三个主要控制部分,分别是单片机超声波测距部分、处理器控制部分以及液晶显示部分.通过控制步进电机的正反向运转来进行调速,超声波的测速控制电路通过单片机进行控制;超声波模块采用HC-SR04控制发出、接收超声波,若有遮挡便会自动返回,根据发出和接收的时间与超声波速度计算公式得出两车之间的距离. 图8 防追尾系统设计原理图 汽车防追尾警示装置仿真模拟有正常行驶状态、预警状态和紧急制动状态三种运行状态.考虑到紧急制动距离为1.5 m,本设计安全距离设计为2 m.运行仿真时液晶显示器会显示安全距离、紧急制动距离以及两车之间的实际距离.通过调整超声波模块HC-SR04上的RV1两端可以控制距离.D1、D2、D3均为显示灯,其中:D2显示绿色,车辆为正常行驶的状态;D3显示红色,车辆为紧急制动的状态;D1显示黄色,车辆为预警的状态. 当两车之间实际距离为2.5 m时,该距离大于设定的安全距离2 m,此时绿色指示灯亮起,步进电机持续运转,模拟汽车正常行驶状态(见图9).通过减小距离按键模拟两车之间的距离减小,当两车之间的实际距离约为1.96 m时,该距离小于设定的安全制动距离2 m,大于紧急制动距离1.5 m,此时黄色指示灯亮,步进电机减速模拟汽车自动减速过程(见图10).控制按钮模拟两车之间的距离减小,两车的实际准确距离为1.21 m时,小于紧急制动最小距离1.5 m,此时报警装置的红色紧急制动警示灯亮,步进电机停止转动,报警控制系统发出刺耳的蜂鸣器报警声. 图9 正常行驶状态仿真图 图10 预警状态仿真图 防追尾报警器实物模型包括HC-SR04超声波模块、LCD1602液晶显示器、AT89C51单片机最小系统、有源压电蜂鸣器、ULN2003大电流驱动列阵、28BYJ-48步进电机以及3个指示灯.整体装置模型如图11所示. 当电源通电时,该装置可以检测汽车运行的三种工况:安全行车工况、预警工况以及紧急制动工况.用步进电机的转速模拟汽车的加减速过程;液晶显示器上显示安全距离、紧急制动距离和检测到的实际距离.实物检测的过程与仿真过程相同,测试结果验证了仿真模型和防追尾报警器的可行性. 紧急制动状态是本设计的重点,步进电机模拟车辆行驶状况,液晶显示屏上显示测量距离、设定的安全距离和紧急制动距离.当超声波模块检测到的实际距离小于设定的紧急制动距离时,蜂鸣器发出报警,报警指示灯红灯亮,步进电机停止转动,模拟汽车减速自动刹车过程. 汽车防追尾警示装置从装置设计和系统设计两方面入手,研究建立了合适的防追尾测距装置模型.该模型能够准确地判断道路上驾驶车辆的安全性与行驶状态,在必要时可对检测的结果和错误进行及时处理,生成相应声光报警信号,提醒驾驶员注意安全.该防追尾警示装置的应用可以有效避免追尾碰撞等安全事故的频繁发生,提高道路的安全性和通行能力.1.2 超声波测距模型设计

1.3 超声波测速测距电路设计

1.4 安全行车警示电路设计



2 处理器系统设计及仿真
2.1 处理器系统设计


2.2 Proteus单片机仿真

3 防追尾报警器实物模型验证
4 结语
