重载铁路移动闭塞系统架构研究
2021-02-23杨霓霏刘晓斌
杨霓霏,王 浩,刘晓斌,徐 强,赵 琳
(1. 中国铁道科学研究院集团有限公司 通信信号研究所,北京 100081;2. 中国铁道科学研究院集团有限公司 电子计算技术研究所,北京 100081)
重载铁路运输因具有运能大、效率高、运输成本低等优势而受到世界各国的广泛重视,是大宗货物经济有效的运输方式。大秦铁路是我国西煤东运的主要通道之一,也是我国第一条双线电气化重载运煤专线,作为我国重载铁路发展的标杆,大秦铁路从建成通车到现在已有30年[1-2]。随着经济社会的快速发展,对于重载铁路货运系统的运输能力提出了更高的要求。大秦铁路线上运行的机车车辆类型、编组长度等组合较多,现有的固定闭塞制式不能充分发挥各种类型列车的性能。基于重载列车车长、制动力等方面安全因素的考虑,大秦铁路重载列车目前普遍是地面信号显示绿黄灯时降速,地面信号黄灯时控制列车停车,不能使线路允许通过能力最大化,在一定程度上限制了运输效率的进一步提升。基于此,本文以大秦铁路为依托,对重载铁路移动闭塞系统进行研究[3],在既有重载线路考虑引入移动闭塞系统,从而提升大秦铁路乃至我国重载铁路货物运输能力。
1 移动闭塞原理
1.1 固定闭塞制式
在采用固定闭塞制式的系统中,信号显示是速差式信号。列车追踪目标点为前行列车所在闭塞分区的始端,后行列车从最高速度开始制动的计算点为要求开始减速的闭塞分区的始端,这两个点不因列车特性等因素而变化。在这种分级速度控制模式下,以一个闭塞分区为单位,根据列车运行的速度分级,对列车运行进行速度控制。分级速度控制系统的列车追踪间隔主要与闭塞分区的划分、列车性能和速度有关,而闭塞分区的长度是以最坏性能的列车为依据并结合线路参数来确定的,因此对于不同速度列车混合运行的线路,固定闭塞制式严重影响其运输能力。
1.2 移动闭塞制式
移动闭塞制式下,列车可以直接追踪到前行列车的安全后端,不再需要固定的闭塞分区划分。没有了固定闭塞分区划分的限制,从而可实现更灵活和更高密度的追踪。
移动闭塞系统采用连续速度曲线控制模式进行闭塞设计,通过车地通信系统获取实时列车位置信息,实现列车安全定位,地面无线闭塞中心根据前方线路状况及轨道占用情况,实时生成行车许可并发送给相应列车[4-5]。而列车车载设备则依据列车安全控制模型,根据列车动态特性参数、线路参数及速度和位置等实时动态信息,计算列车当前最大允许速度,实时监控列车运行,从而保证列车安全、高效运行。移动闭塞系统在显著缩短行车间隔和提升线路运输能力的基础上,由于不再依靠地面轨道电路设备识别轨道占用,而是以前行列车的尾端作为移动授权的终点,可以极大地减少轨旁设备,从而也能减少后期的维护成本,降低工程造价,是目前轨道交通可持续发展的信号控制模式。
列车自主定位和列车自主完整性检查是实现移动闭塞的关键技术,也使得取消如轨道电路等轨道占用检查系统、简化轨旁设备成为可能,但保留轨道占用检查系统并不制约移动闭塞制式的实现,甚至更有其积极意义[6-7]。当移动闭塞系统的列车定位或列车完整性检查功能故障时,在未安装轨道电路或计轴设备的线路上恢复列车运行将变得非常困难。因此,轨道占用检查系统对于充当移动闭塞系统的后备系统和支持多制式列车混运有着重要的意义。针对既有重载铁路信号系统的情况和特点,在保留既有主要轨旁设备基础上建设移动闭塞系统是一个值得研究的方向[8]。
2 重载铁路移动闭塞系统架构
2.1 重载铁路既有信号系统
以具有代表性的大秦铁路为例,重载铁路线轨旁安装有轨道电路和信号机,轨道电路以绝缘节分割,将轨道划分成区段,完成轨道占用检查和发码功能,为车载提供机车信号授权,信号机为行车提供目视信号授权。区间自动闭塞系统根据区间运行方向、闭塞分区占用/空闲状态、按照固定闭塞制式控制区间通过信号机显示和轨道电路的发码。如图1所示,机车装备CTCS-0级系统、测速测距设备、轨道电路信息读取设备(TCR,Track Circuit Reader)、CTCS-0级的列车接口和司机接口。
2.2 基于CTCS-0级系统的移动闭塞功能改造
为实现移动闭塞功能,需引入以下技术和设备:轨旁新增定位应答器,车载新增应答器传输模块(BTM,Baliser Transmission Module),实现列车自主定位功能;列尾新增列车完整性检查列尾单元,车载新增列车完整性检查单元,实现列车完整性检查功能;车载安装列控用通信电台,实现基于无线通信的车地双向通信;车载新增列车超速防护(ATP,Automatic Train Protection)主控单元及其他设备和功能单元;轨旁新增无线闭塞中心(RBC,Radio Block Center)系统。改造后的重载铁路车载和轨旁信号系统如图2所示。
RBC系统是移动闭塞地面系统的核心设备,RBC与既有的联锁系统通过列控专用网络连接,从联锁系统获取车站进路状态信息及所有站内和区间轨旁设备状态信息;RBC接入无线通信系统核心网,实现与车载的双向通信,从车载获取列车数据信息和实时的列车位置信息,并向车载发出以移动授权(MA,Movement Autority)信息为主的控制信息。
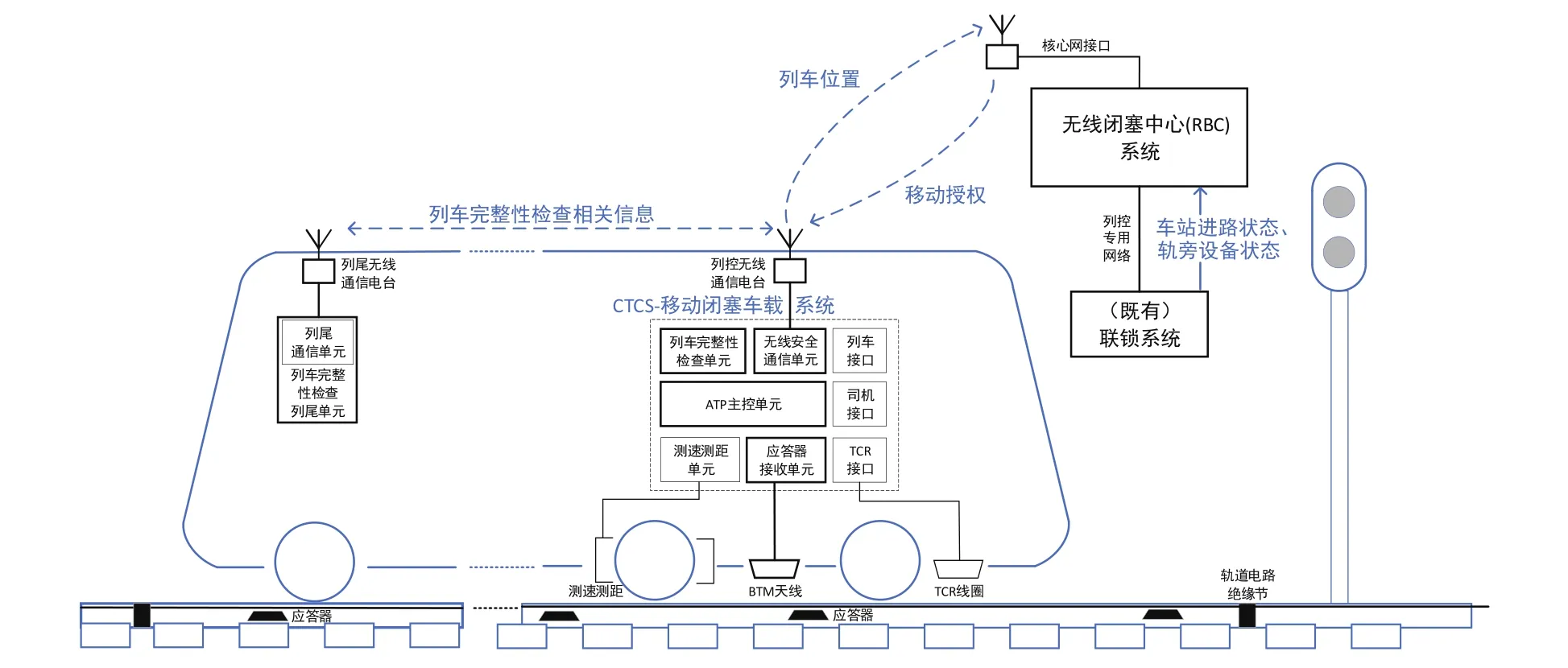
图2 改造后的重载铁路车载和轨旁信号系统
2.3 系统架构设计
CTCS是我国铁路信号系统的基本体系,随着铁路信号系统的发展,CTCS体系也在稳步地发展和完善,移动闭塞属于CTCS-4级功能要求,本文以CTCS体系为依托进行系统架构的设计。系统架构如图3所示,设计要点如下:
(1)线路上布置应答器,实现列车自主定位并向列车提供RBC呼叫信息;
(2)车载新增ATP子系统,ATP与所属位置的RBC建立通信,向RBC报告列车位置等信息,接受RBC分配的MA并严格按MA控制列车运行;
(3)列车上配置具备列车完整性检查功能的设备,实现安全的列车完整性检查功能;
(4)采用IP化的车地通信接口,更好地适应通信领域的技术发展;
(5)地面新增RBC子系统,RBC与其管辖范围内的车载建立双向通信,管理与其通信的列车状态,接收列车位置报告并给车载分配MA及线路数据,控制列车以移动闭塞制式在区间运行;
(6)既有联锁改造,增加与RBC接口,将车站进路状态及区间轨道电路状态(代传)发送给RBC;
(7)既有CTC改造,增加与RBC接口,获取通信列车状态并可向RBC下达部分控车命令,包括临时限速命令;
(8)保持既有重载铁路固定闭塞信号系统功能并作为移动闭塞系统的后备系统,预留由ATP子系统实现列车运行监控装置(LKJ)的功能。
如图3所示,图中的棕色框是新增设备和系统,棕色线表示新增接口,而新增接口均是CTCS体系标准接口。蓝色框表示既有需改造设备,蓝色线为既有需改造接口。

图3 重载铁路移动闭塞系统架构
3 基于列车位置追踪的移动闭塞安全功能
作为列控系统的较高等级,移动闭塞系统基于各子系统的多项安全功能来实现,其中,有些是移动闭塞系统新增的关键技术,比如对于车载子系统的列车定位、列车完整性检查,对于地面核心设备RBC而言,就是列车位置的追踪功能。列车位置追踪功能是基于车载提供的列车安全位置、列车完整性状态、轨旁闭塞分区占用和空闲状态,实现对RBC管辖范围内所有列车位置进行实时标记和处理,为移动闭塞制式的MA分配提供安全依据。
3.1 基于轨旁区段状态标记追踪区域
系统初始状态下,“占用”的区段如图4(a)所示,区段A被标记为“未知区域”,表示可能有隐藏车辆(位置未知的车辆)在该区域内的任何位置。“空闲”的区段B则可确认该区段范围内无车。
3.2 给新报告位置的报告车标记追踪区域
如图4(b)所示,车1报告位置在区段A,不具备完整性,只能确定车头位置,无法确定车尾位置(只能估计一个后端);如图4(c)所示,车1报告确认了列车完整性,可以确定其后端的位置(称为确认后端)。以上两种情况都仍然要在位置报告车的前端到区段A的边界及后端到区段A的另一边边界标记“未知区域”,表示仍然可能有隐藏车辆在这两个区域内。
3.3 确认报告车前端和后端无隐藏车
必须经过一个安全的处理过程确认才能“清除”报告车前端和后端的隐藏车,如图4(d)所示,车1经历了一个前方轨道空闲(TAF,Track Ahead Free)确认过程之后,前端被标记为“无车区域”;如图4(e)所示,车1经历了一个后端筛选过程之后,后端被标记为“无车区域”。只有确认前端无隐藏车之后才可以为该车分配MA,只有确认了后端无隐藏车之后才可以为该车后方的车分配移动闭塞的MA。
如果错误地标记了无车区域,比如错误地标记了前端无隐藏车,则为车1分配MA后,车1依据MA提速运行,会与实际存在于车头前方的车发生碰撞;比如错误地标记了后端无隐藏车,则为车1后方的车分配以车1确认后端为终点的MA,可能会造成后车与车1后方实际存在的车发生碰撞。
3.4 为全部轨道实时标记列车追踪区域
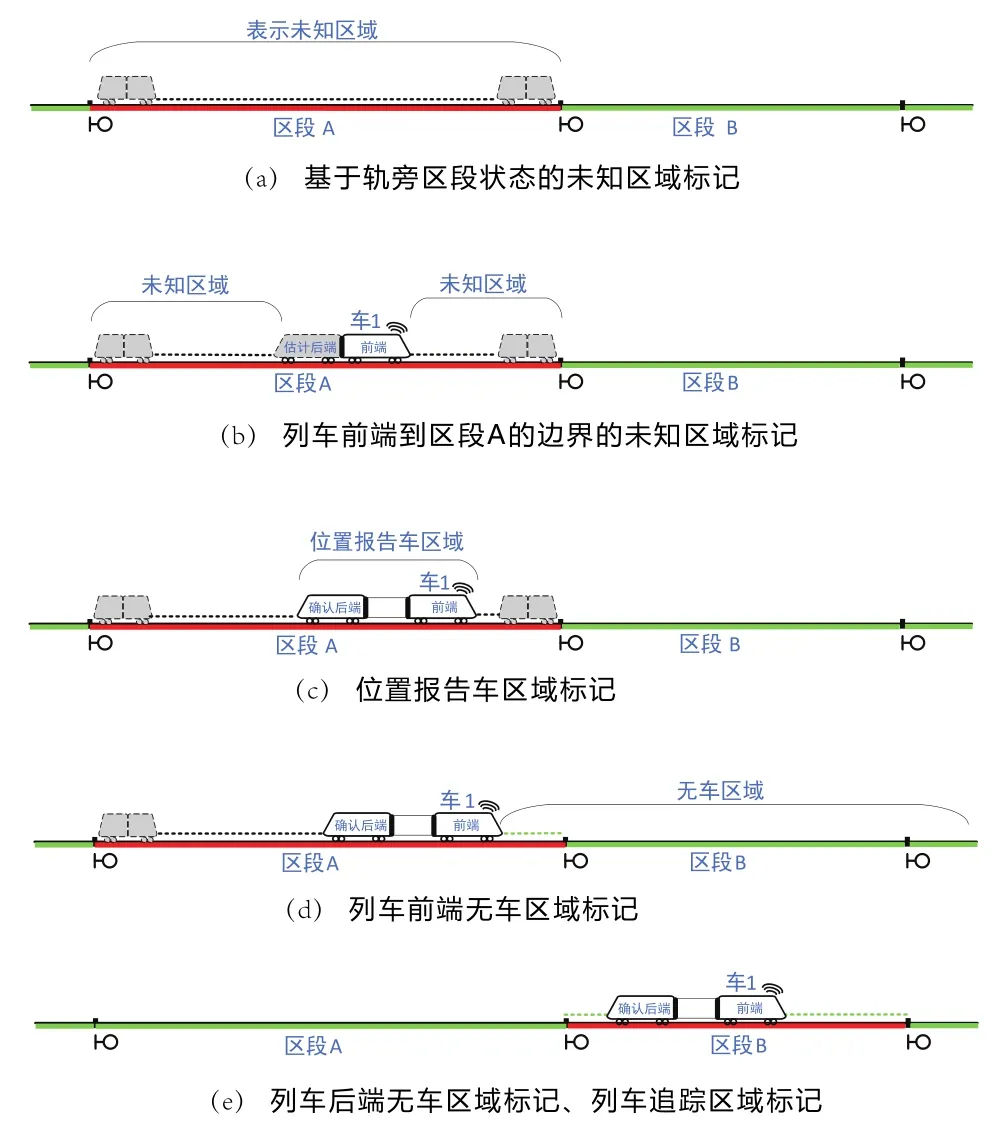
图4 列车追踪区域标记
列车位置追踪功能就是实时地为全部轨道标记以下3种区域:“未知区域”“报告车区域”“无车区域”,如图5(a)所示。其中,“未知区域”是安全侧,“无车区域”是危险侧,只有当确认无风险才可标记为“无车区域”。
3.5 列车位置丢失后标记相关区域为“未知区域”
如图5(b)所示,车1位置丢失,区段B范围被标记为“未知区域”,车2的MA缩回到区段B的入口处。车1离开区段B,区段B空闲后,车2的MA可继续延伸。
3.6 在“无车范围”内的区段从空闲变为占用
如图5(c)所示,区段B在车1的MA范围内,从空闲变为占用,这时不能立即将其按“未知区域”处理,因为区段B所在区域为“无车”,区段B占用可能为车1进入或区段B故障占用(实际无车进入),这种情况下先确认是否为车1进入,比如通过一定时间的等待,若在等待时间内收到车1的位置报告进入区段B,则确认为车1进入区段,否则确认为隐藏车。
上述列举了部分基于区间轨道电路区段实现列车追踪的典型场景,移动闭塞功能基于列车位置追踪实现,保证安全性兼顾可用性是系统的设计原则,处理好这对矛盾是系统设计的关键。
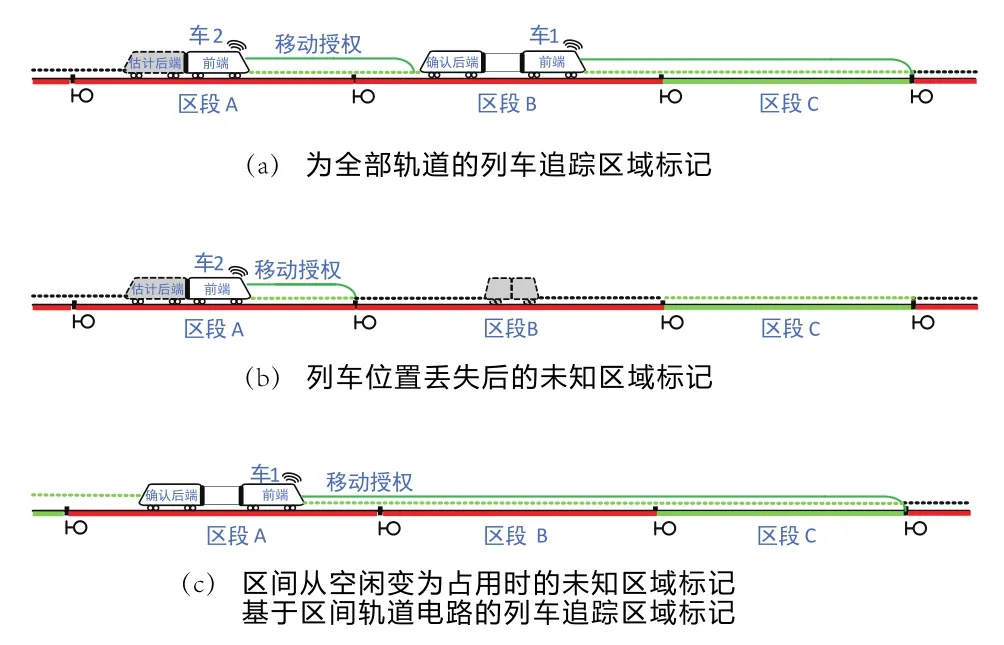
图5 基于区间轨道电路的列车追踪区域标记
4 结束语
文章依托大秦铁路,研究重载铁路移动闭塞系统架构。详细介绍了移动闭塞系统架构设计要点、关键技术,以及基于列车位置追踪的移动闭塞安全功能。针对既有重载铁路信号系统的情况和特点,下一步将研究如何在保留既有主要轨旁设备基础上建设移动闭塞系统。在重载铁路既有线引入移动闭塞系统,可以提升大秦铁路乃至我国重载铁路货物运输能力。
