无人机电力巡检系统研究
2021-02-22冯新江林泽科陈岳贤潘桢
冯新江 林泽科 陈岳贤 潘桢

摘要:随着电力系统改革的深化,电力行业快速发展,电网规模也越来越大,但这也给电力巡检任务带来了一定困难,亦提出了更高的要求。在传统的人工巡检无法应对当下巡检任务的背景下,无人机凭借其较高的灵活度与工作效率,为电力巡检带来了更自动化、智能化的解决方案。现提出一套无人机电力巡检系统,实现了无人机自动化巡线,通过多路运营商无线网卡高速、稳定地回传图像与视频,地面服务器端通过测温校准及分析进行故障检测,并将接收到的数据进行智能归档,保证了无人机电力巡检的准确性和稳定性。
关键词:无人机;输电线路;巡检系统;无线通信;故障检测
0 引言
现有的电力系统主要由四个部分组成,分别是发电、输电、配电和用电,任意一个环节出现问题都会影响整个电力系统的安全、稳定运行。输电部分的线路主要有电缆线路和架空线路两种,不同于电缆线路主要分布在城市企业、医院等地,检修起来较为方便,架空线路通常分布在野外、山区等人迹罕至的地方,甚至分布在峭壁、雪山等恶劣的自然环境中,若是出现输电线老化、断股或绝缘子损坏等情况,则经常会因为无法及时检修而导致电力系统出现故障,从而造成严重的经济损失[1-5]。
传统的电力巡检主要依靠专业的巡检人员前往现场对输电线路进行排查和检修,一方面,这样的人工巡检效率较低,耗时较长;另一方面,野外复杂地形的设备运输和高空作业的安全保障等都面临严峻考验。因此,电力巡检亟需向智能化和自动化方向发展[6-7]。
为了解决上述问题,无人机越来越多地应用于电力巡检解决方案中,其体型小、重量轻,且具有较强的灵活性和自主性,可以较好地实现对架空输电线路的全方位检查。巡检用无人机主要分为三类:无人直升机、固定翼无人机和多旋翼无人机。其中,无人直升机具有优越的性能,具备续航久、可悬停和稳定性强等优点,但是造价和耗费相对较高,一般用于特殊自然灾害救援等情况;固定翼无人机可以飞行较远距离,速度快且较为稳定,但不能悬停,灵活性较差,适用于大面积输电网络的巡查;多旋翼无人机机动性强,灵活度高,具有较高的性价比,但续航能力一般,抗风能力较差,对气象条件要求较高,适用于局部的精细检查以及复杂地理环境下的巡检任务[8-9]。
万琪等人提出了电力巡检中无人机的数据链路覆盖增强技术,对数据链的通信技术进行了升级,提升了通信系统的飞行控制和数据回传的可靠性[10]。王亚萍等人提出了一种可见光图像中的输电线路缺陷诊断方法,可自动诊断电力线路上可能存在的断股、异物附着等缺陷[11]。阳一雄等人则研究了六翼无人机搭载红外测温仪在电力巡线中的应用,采用测温分析方法诊断电力线路中的缺陷与故障[12]。彭向阳等人设计研发了一套无人直升机多传感器电力安全巡检系统,实现了电力线路的安全巡检和智能诊断,提高了电力巡检的效率[13]。
本文提出了一套无人机电力巡检系统,实现了无人机对指定任务的自动巡线,并结合4G网络进行高带宽传输,完成无人机与地面服务器之间的通信与数据交换,包括指令信号和回传图片、视频等,最高支持流畅、稳定传输1 080p60i全高清视频,保证故障检测的实时性。该系统还利用无人机拍摄回传的可见光图像、原始红外图像以及相机校准参数,实时进行温度校准分析,并支持自动分析与人工定点分析功能,以保证故障检测的准确性。
1 无人机电力巡检技术简介
在無人机电力巡检任务中,除了对无人机本身的品质有一定的要求外,整个系统中的各个模块也有各自的技术特点和难点,每一个模块都直接影响着整个系统的巡检效率和精度。
1.1 巡线及避障技术
无人机在执行既定电力巡检任务时,需要准确地按照任务路线进行飞行,躲避线路上可能存在或突然出现的障碍物,并在躲避结束后及时回归到任务路线上继续巡检。目前的无人机巡线技术主要通过GPS定位及导航技术、基于摄像的视觉技术等结合应用实现,但在飞行过程中易受到如恶劣天气造成无人机姿态异常等因素影响,导致视觉技术的识别率下降。避障技术主要通过视觉技术、红外探测技术和声呐探测技术等结合应用实现,但对于较大或者移动速度较快的障碍物,无人机可能会因为来不及躲避而损坏。因此,无人机自身以及挂载设备的硬件品质和各种软件技术都需要进一步提升,以保证无人机在巡检任务中的安全性和稳定性。
1.2 无人机姿态控制技术
无人机通常质量轻、体型小,在巡检任务飞行过程中容易受到恶劣天气的影响而失去平衡,甚至坠毁,同时,无人机姿态的正常与否也影响着巡线、避障和故障检测的准确性。目前无人机的姿态控制技术主要依赖安装在无人机上的飞行控制器来实现。当无人机姿态发生异常时,飞行控制器将根据当前无人机的具体姿态、线速度、角速度和加速度等对无人机进行动作调整,帮助无人机回归到正常的飞行状态,保证巡检任务的正常执行。
1.3 无线通信技术
执行巡检任务时,无人机需要与地面服务器保持实时的无线连接,以保证可以实时回传无人机的状态信息、任务信息和所拍摄的图像、视频等数据文件,以及接收地面服务器发送的控制信号并给予反馈等。但电力巡检的环境往往十分复杂,且充满变化和不确定因素,系统的无线通信技术需要具备很强的抗干扰能力,以及足够的传输速度和带宽来支撑实时信息传输甚至巡视高清视频的直播,以保证整个电力巡检任务完成的及时性和稳定性。
1.4 故障检测技术
目前围绕无人机的电力巡检任务主要是通过无人机在巡检过程中挂载相应的摄像设备,拍摄输电线路的相关图像、视频等并进行回传,地面服务器再对接收到的图像、视频等进行处理和分析,得到输电线路的健康状况并判断是否有缺陷或故障。常见的故障分析手段有测温分析、线路外形分析等。影响故障检测准确性的因素主要有:拍摄的角度,图像、视频文件的清晰度,分析技术的精度等,各部分的准确性和稳定性都决定了整个故障检测的准确性,因此都不容忽视。
2 无人机电力巡检系统
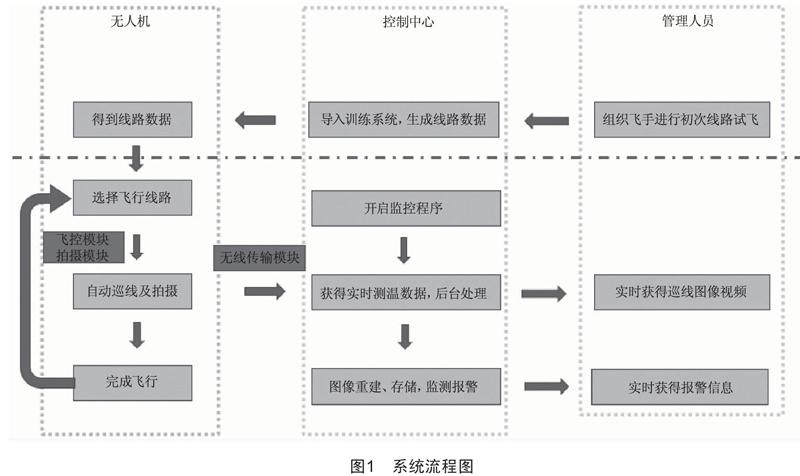
应用于输电线路巡检的无人机系统主要包括以下几个部分:无人机及其飞控平台、通信与数据传输模块、测温分析与故障检测模块、数据文件管理模块以及地面服务器等。无人机电力巡检系统流程如图1所示。
2.1 无人机及其飞控平台
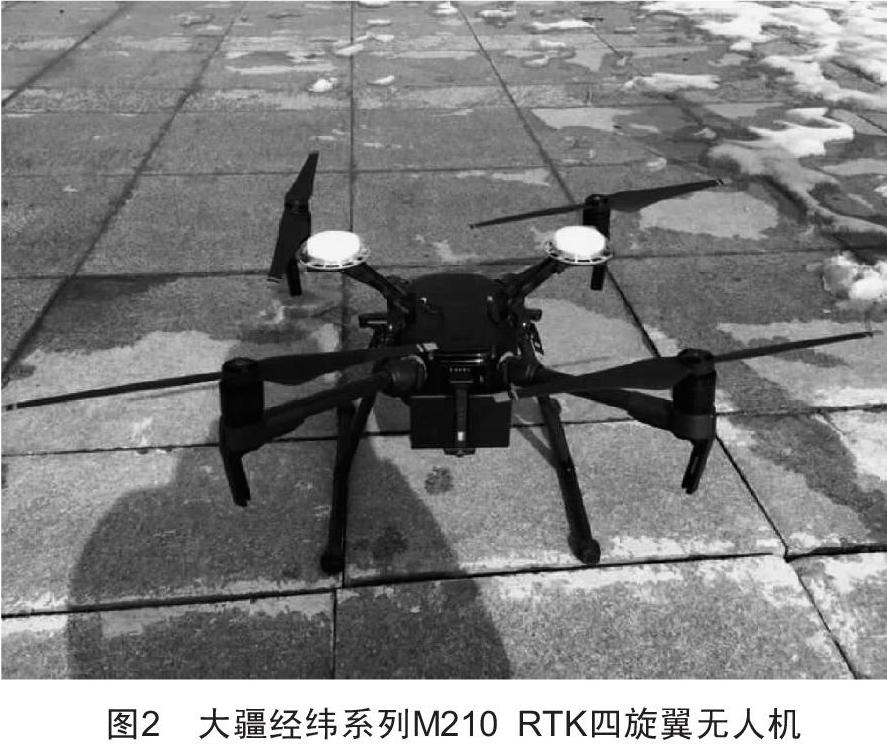
本系统中,主要采用大疆公司经纬系列行业M210 RTK四旋翼无人机,如图2和图3所示,挂载FLIR公司双光热成像相机作为测温相机,其具备1 200万像素镜头,并支持4K高清可见光JPEG照片,TIFF、R-JPEG图像以及MOV、MP4视频等。
飞控平台基于大疆公司SDK开发,包含飞行线路管理模块、自动飞行模块、杆塔位置模块、采样数据管理模块和文本信息模块等。其中,飞行线路管理模块可以帮助工作人员预先设定所要巡检的片区和飞行的路线;自动飞行模块和杆塔位置模块则帮助无人机按照指定的飞行任务进行自动巡检;无人机采集回传的图像、视频等数据将通过采样数据管理模块进行收集、整理并发送到相应的地面服务器;文本信息模块会将无人机的实时状态、任务实时进展和其他信息等记录为日志,方便工作人员实时了解无人机的状态以及任务结束后的回溯和检查。
2.2 通信与数据传输模块
在执行输电线路巡检任务的过程中,无人机需要与地面服务器保持实时连接,一方面,地面服务器要获取无人机的实时状态信息,并发送相应的控制信号指挥无人机进行下一步动作;另一方面,无人机拍摄、采集到的图像和视频等数据需要回传给地面服务器进行直播、保存和分析等。本系统的视频传输设备如图4所示,为Altera公司可编程逻辑器件搭载Fujitsu公司编码芯片实现的无线数据传输设备,分为传输模块和供电模块两部分。
视频传输过程中,将无人机搭载的热成像相机录制的视频通过HDMI接口导入传输设备,传输设备中基于FPGA的串并行转换模块将其转换为串行数据,经过编码后再通过AT91SAM9G45芯片把视频流传输给地面服务器。AT91SAM9G45芯片的主要功能有:状态控制、TCP协议实现、带宽优化、心跳包、重传管理、网卡管理、数据处理和设置信号等。其中,带宽优化主要是为了确保网卡带宽与需发送的视频数据量相匹配,主控芯片会根据网卡当前的信号强度和RTT等来预估网卡的网络带宽,通過计算整体的网络带宽动态调整传输码率,再根据网卡的链路带宽状态调整其传输数据缓存,达到调整其传输数据量的目的。理论上,4G网络下行带宽可达100 Mbps,上行带宽达50 Mbps,4路网卡能达到的总下行带宽为400 Mbps,总上行带宽为200 Mbps,可支撑1 080p60i的全高清视频传输,保证之后故障检测的准确性。
在地面服务器端,也会有相应的程序对其进行控制,与无人机进行实时通信和数据传输,并在有直播需求时,将需要直播的视频传送到相应的直播地址,利用直播端播放程序进行解码、直播。
2.3 测温分析与故障检测模块
输电线路中的故障往往伴随着异常高温,尤其是线夹、绝缘子上的挂环和防振锤等金具,通过对这些异常高温的检测可以发现输电线路中的安全隐患或者存在的缺陷等。一般的红外成像设备采用辐射测温法计算物体温度,通过接收到的目标辐射的红外能量值计算目标的温度。但红外成像设备一般使用黑体辐射源(发射率近似为1,发射率为物体表面单位面积上辐射出的辐通量与同温度下黑体辐射出的辐通量的比值)分度,实际上目标的发射率通常小于1,导致所生成的热度图像中测量温度值偏离目标的表面实际温度[14]。
本系统利用原始红外图像中每个像素点的16位红外图像原始值RAW、反射温度Trefl以及从图像META信息里获取的相机校准参数,如物体发射率(Emissivity)、相机普朗克常数B、相机普朗克常数F、相机普朗克常数O、相机普朗克常数R1、相机普朗克常数R2等来对目标物体的实际温度进行校准。经过校准后的红外图像中的温度信息与目标表面的真实温度更加接近,提高了故障检测的准确度。
对于无人机回传的图像,系统会自动进行温度校准和分析,若是存在区域温度超过阈值的情况,将触发系统警报,警报信息包含温度信息、杆塔地理位置信息和杆塔编号等。此外,工作人员也可以手动对任意图像的温度信息进行查看和分析,如图5所示。
2.4 数据文件管理模块
随着无人机数量的不断增加以及电力巡线任务的次数积累,回传的日志、图像和视频文件等数据量将会积累成一个庞大的数字,仅靠人工管理这些数据效率极低,需要智能化的管理手段和平台来完成此项任务。
本系统的数据文件管理模块在接收到数据文件后,将会自动对接收到的可见光JPEG图、R-JPEG图、图片详细参数txt文本文档以及分析得到的红外成像图按照时间、巡检线路、杆塔等信息进行命名,并存储到云服务器相应的文件夹内,方便以后的文件整理和回溯。
3 结语
本文提出了一套基于无人机的电力巡检系统,无人机将按照事先制定好的飞行路线完成巡线任务,同时工作人员也可以采用人工操作的方式进行电力巡检。巡线任务中,无人机与地面服务器将通过运营商无线网卡进行高带宽、高稳定性的图像与视频传输,最高支持1 080p60i全高清视频直播。对于接收到的日志、图像和视频等文件,系统将智能化地归档保存,方便回溯,同时将自动对图像进行测温校准和分析,对异常高温的零部件和杆塔进行报警,保证了电力巡检任务的实时性和准确性,同时也提升了巡检的质量和效率。
[参考文献]
[1] 钱金菊,韩正伟,易琳,等.图像处理技术在无人机电力线路巡检中的应用[J].电子技术与软件工程,2017(15):72-73.
[2] 彭向阳,刘正军,麦晓明,等.无人机电力线路安全巡检系统及关键技术[J].遥感信息,2015(1):51-57.
[3] 李宁,郑仟,谢贵文,等.基于无人机图像识别技术的输电线路缺陷检测[J].电子设计工程,2019,27(10):102-106.
[4] 郭昕阳,李卫国,郑建刚,等.一种轻型电动无人机在输电线路巡视中的应用技术[J].华北电力技术,2013(4):61-64.
[5] 汤明文,戴礼豪,林朝辉,等.无人机在电力线路巡视中的应用[J].中国电力,2013,46(3):35-38.
[6] 张文峰,彭向阳,陈锐民,等.基于无人机红外视频的输电线路发热缺陷智能诊断技术[J].电网技术,2014(5):1334-1338.
[7] 厉秉强,王骞,王滨海,等.利用无人直升机巡检输电线路[J].山东电力技术,2010(1):1-4.
[8] 杨冲.无人机在电力巡线中的应用[J].上海电力,2015,28(5):29-32.
[9] 徐健.无人机巡检输电线路技术的应用探析[J].科研,2016(35):21-22.
[10] 万琪,郑涛,何云翔,等.电力巡检无人机数据链路覆盖增强技术[J].邮电设计技术,2017(9):60-64.
[11] 王亚萍,韩军,陈舫明,等.可见光图像中的高压线缺陷自动诊断方法[J].计算机工程与应用,2011,47(12):180-184.
[12] 阳一雄,梁照敏,徐晓峰.六旋翼无人机红外测温在电力巡线中的应用研究[J].科技风,2015(13):90.
[13] 彭向阳,陈驰,饶章权,等.基于无人机多传感器数据采集的电力线路安全巡检及智能诊断[J].高电压技术,2015,41(1):159-166.
[14] 张伟,高魁明.發射率对辐射测温精度的影响及其在线测量技术[J].沈阳工业学院学报,1990(2):69-76.
收稿日期:2020-12-21
作者简介:冯新江(1988—),男,浙江绍兴人,工程师,研究方向:配电线路。
林泽科(1984—),男,浙江绍兴人,硕士,高级工程师,研究方向:电气工程、配电线路故障分析。
陈岳贤(1991—),男,浙江绍兴人,硕士,助理工程师,研究方向:配网自动化。
