基于嵌入式的空间光通信系统前馈补偿系统设计
2021-02-22刘晓兴
刘晓兴
(中国人民解放军91918部队,北京 102300)
0 引言
嵌入式系统由软件、硬件两类执行结构共同组成,是能够实现独立运作的应用器件。软件方面包含操作小系统和基础运行环境,硬件方面则由通信模块、存储器、信号处理器等多个结构元件组成。相较于一般计算机处理系统来说,嵌入式系统虽不能实现数据信息的大容量存储,但却有与之匹配的EEPROM DENG、E-PROM型存储介质,可在保持API编程接口转存能力的同时,完成对大型待存储数据的规划与分割[1-2]。早期阶段,嵌入式系统的执行功能相对较为单一,所有单片机元件都只能以可编程控制器的形式存在;而随着高端嵌入式CPU的出现,PowerPC、ARM等结构元件被赋予了更高等级的执行功能,不仅缩小了嵌入式系统所占的实际存储空间,也完全实现了对各类应用设备的低功率部署[3]。
空间光通信系统是指以激光光波为载体、大气环境为传输介质的数据通信系统,结合了微波通信与光纤通信应用优势,同时具备传输速率快、通信容量大的特点,既不需要光纤电缆的配合,也可直接解调来源于对立主机的激光脉冲信号,实现标准化双工通信环境的构建[4]。随着光通信覆盖范围的逐渐扩大,核心控制主机对于目标数据信息的捕获速率也开始不断加快,导致各级通信设备间的动态跟踪误差实值迅速扩张。为缓解上述情况,传统光电伺服与ARM调控系统借助CPLD平台,实现空间光通信信号在PPM波段上的定向调制,再将激光驱动器直接加载到二极管之上,完成补偿信号由输出端到输入端的反向应用控制。但该方法仅适用于低参量传输频段,很难在光通信数据量提升的同时,实现对目标数据的快速捕获。基于此引入嵌入式处理技术,设计空间光通信系统的前馈补偿系统,在并串转换电路、波分复用器件等多个硬件执行设备的作用下,创建与光通信数据相关的根文件结构体,完成对前馈型脉冲波的直接调制与处理。
1 空间光通信系统的前馈补偿系统硬件结构
空间光通信系统的硬件前馈补偿结构由并串转换电路、信号发射模块、波分复用器件、光放大器等多个元件共同组成,具体搭建方法如下。
1.1 并串转换电路
并串转换电路是前馈补偿系统中唯一的电能输出装置,可在光通信天线的作用下,顺次连接多级VSS与VCC电子传输信道,并联合C型、Y型、L型、Q型四类空间互感电阻,完成对前馈通信基波的复用性调节控制。EM4094作为并/串转换功能的执行芯片,可承接与空间光通信数据相关的序列信息,又因与uController接口直接相连,可有效控制前馈补偿信息的并行传输码率,再将这些信号参量平均分配至所有空间互感电阻中,以拉近各级通信设备间的空间占用距离,缩小动态跟踪误差的实际表现数值[5]。VCC接口与C型空间互感电阻相连,为保证光通信信号的完整发射,该类型电阻的接入总量较大,是并串转换电路中负载量级水平最高的电阻结构体。Y型、L型、Q型电阻只能负载于C型互感电阻之间,受到不同通信功能的限制,这些电阻结构分别与VDD、VSS、ANT、RFIN及AGD电子传输信道相连。在保证EM4094元件完整接收空间光通信数据后,5个DOUT信道同时开启连接状态,借助uController接口将这些信息参量直接传输至波分复用器件、功率放大器等下级硬件设备之中[6]。
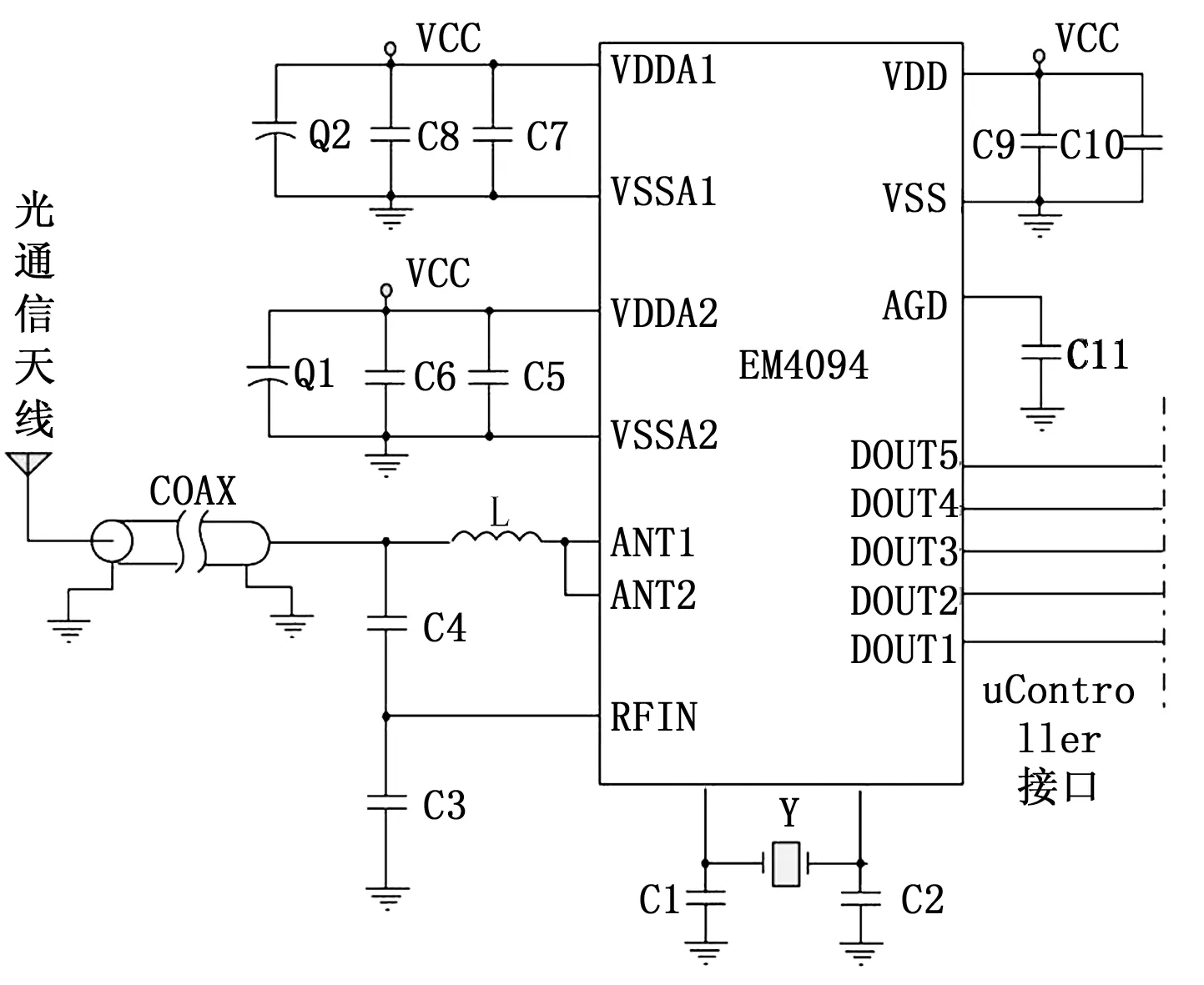
图1 并串转换电路图
1.2 光通信信号发射模块
光通信信号发射模块位于前馈补偿系统中部,内部包含一个SM激光二极管、一个嵌入式电机、一个通信触发器、一个信号处理器和多个C型、L型与Z型空间互感电阻。嵌入式电机是光通信信号发射模块的边部电子接收器,可与并串转换电路的uController接口端相连,一方面感知系统内部的电子传输需求,另一方面汇总具备前馈型补偿调节能力的空间光通信信号[7]。SM激光二极管与嵌入式电机之间并联接入多个L型互感电阻,可根据前馈输入电压的变化趋势,更改已接入电阻的实际阻值水平,达到处理通信信号的目的。信号处理器始终保持固定的电子感知形式,输入电压只能由正极流向负极,该原件两侧分设两个阻值相同的Z型空间互感电阻,可按照光通信触发器中前馈信号的实时输出状态,变更自身所负载的补偿电压应用量,通过数据信息的阶段性权衡,完成对系统内光通信信号的发射处理。

图2 光通信信号发射模块结构图
1.3 波分复用器件
波分复用器件是空间光通信系统中的重要组成元件,可将不同波长的光源信号结合在一起,经由光学发射天线直接传输至合波器结构中,能够聚拢未被占据的前馈补偿波段,与信号发射模块统称为底层光通信处理单元。空间光自聚焦棒透镜存在于光纤结构体与光栅组织之间,可改变信号波的入射角度,将所有光波聚合在一起,投射在光栅体的定点位置上[8-9]。由于光栅角色散射能力的不同,不同波长的光信号会被系统核心补偿主机配以不同的出射角度,经过透镜的汇聚作用后,大数量级角度实值降低、小数量级角度实值升高,直至上下两端出射波的散射角度均值完全相等,才将光波完整投射至光栅表面,完成对系统前馈补偿通信波的波长选择。光通信波在光纤介质中保持圆周运动行为,两端波体可自由选择输入与输出的真实位置,为保证最终复用波体的平稳输出,光栅体下部也必须负载一个玻璃楔支撑结构。

图3 波分复用器结构图
1.4 嵌入式光放大器
嵌入式光放大器位于波分复用器件末端,可实现空间光输入与输出信号间的自由转换,能够在滤波结构体的作用下,提升与信号参量匹配的前馈通信能量,完成对原始通信数据的扩大处理。波分复用器与嵌入式光放大器的WDM元件相连,可承接所有处于输入状态的空间光通信信号,与其它信号处理设备相比,该结构的额定上限存储条件更高,能适应多变的光通信信号发射行为。两个前馈隔离器分属通信光纤两端,在嵌入放大器元件内部的同时,隔绝大量不必要的光通信信号,以保证放大后信号的输出稳定性[10]。位于放大器元件底部的滤波处理结构,可跟随空间光通信信号的输出频率,更改与信号体相关的实际扩大度量值,直至前馈补偿系统中的输入信号参量完全趋于稳定。
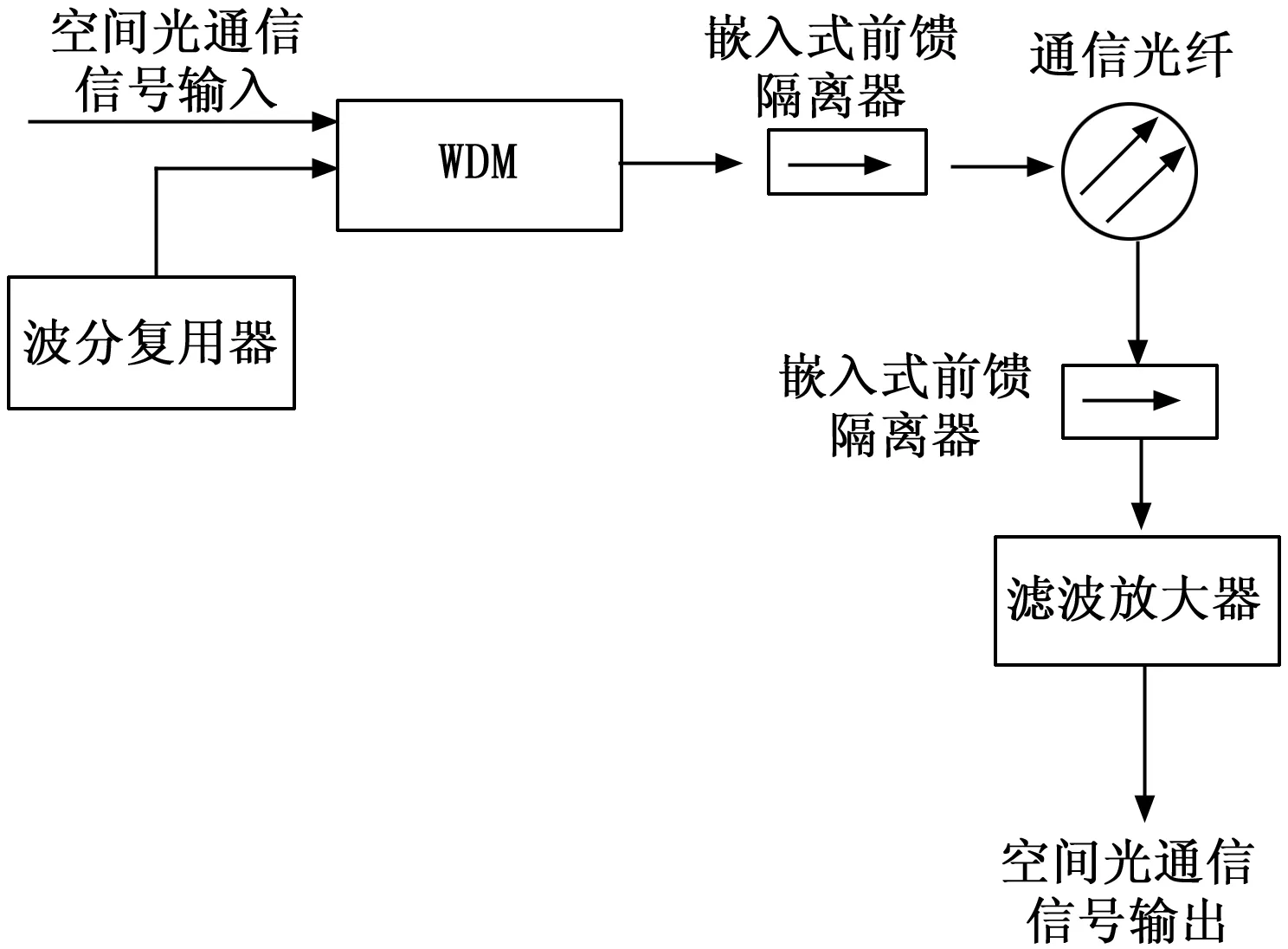
图4 嵌入式光放大器的光信号输出原理
1.5 PWM功率放大器
空间光通信系统前馈补偿系统需要较大的电压与电流才能驱动,而并串转换电路只能提供极为少量的应用电子,多数情况下无法正常驱动通信信号的顺次传输,导致最终补偿调节功率的持续下降。PWM功率放大器借助多个接口元件与其它系统硬件执行设备相连,将暂存于控制主机中的空间光通信信号转存至PWM芯片中,通过信号脉冲的多次调制,改变数据信息的原有传输格式,按照前馈补偿系统的实际应用需求,扩展与设备元件相关的已记录信号总量,在多个电子冲量的共同作用下,完成对空间光通信信号传输功率的放大处理[11]。在操作指令实施的过程中,放大执行键不会一直保持下沉状态,即多数情况下空间光通信信号仍保持原始传输频率,仅在特定时间节点出现短暂下沉,达到放大信号传输功率的目的。
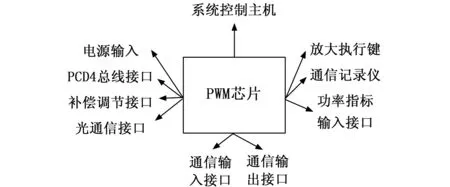
图5 PWM功率放大器结构图
1.6 角编码器
角编码器是实现前馈补偿系统中空间光通信信号传输速度反馈的重要处理元件,只有在信号速度分辨率恒大于伺服电机分辨率的情况下,才有可能接入系统控制闭环之中。光电伺服电机作为并串转换电路的下级负载元件,可控制空间点光源中通信信号的输出频度。当点光源通信信号进入旋转变压器后,所显示数据形式即为通信信号的原始本体[12]。在直流伺服电机的作用下,变压器开启逐级旋转模式,直至所有半页组织均不再显示数据形式为止,此时机体所处位置即为前馈补偿系统最适宜的角编码器连接形式。确保波分复用器件、嵌入式光放大器等硬件结构的接入状态,当一个传输周期内的光通信信号完整发射时,通信显示屏中所表现出的数据形态,就是由角编码器生成的前馈补偿波处理结果。
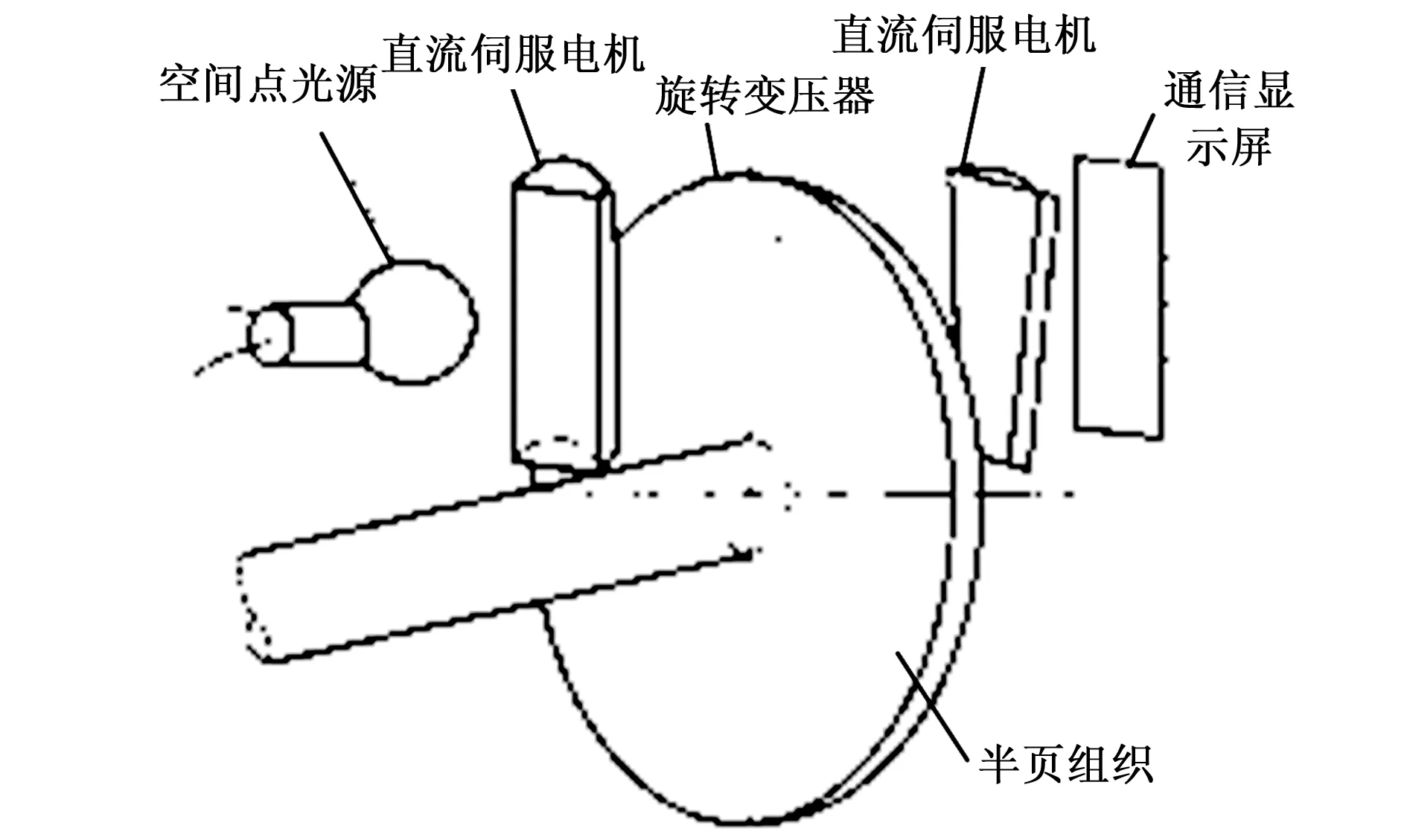
图6 角编码器结构图
2 嵌入式通信系统前馈补偿系统软件设计
在空间光通信系统前馈补偿结构的作用下,按照如下流程,搭建系统的软件应用环境,两项结合,完成基于嵌入式的空间光通信系统前馈补偿系统设计。
2.1 Linux嵌入内核的移植配置
对Linux嵌入内核的移植配置可从补偿处理器移植、前馈开发板移植两方面同时着手。鉴于已嵌入系统内核的移植协议只能支持少次补偿型信号控制处理,所以后续需配置文件必须包含修改、增删、查缺、替换等多种信号处理功能。待移植前馈补偿协议的配置处理主要集中在通信信号角编码修改、PWM放大功率收集两个层面[13]。一个典型的Linux嵌入内核移植配置处理可从如下几个方面展开。
2.1.1 核对硬件环境是否与Linux通信内核匹配
可以查看空间光通信主机中的顶层Linux目录文件,按照数据信号的实际传输需求,提取嵌入式内核中的已编程协议栈,联合PWM功率放大器实现对未移植参量结构体的配置协调处理。
2.1.2 分析Linux嵌入内核中的目录文件结构
如果前馈补偿系统中的光通信信号不能按照既定顺序排列,抽取嵌入式内核结构体中的空间光通信数据包,以信息角编码原理对未配置移植协议栈进行筛查,选出驱动传输能力最强的通信信号参量。
2.1.3 分析Linux平台中的移植处理代码
根据波分复用器件中空间光通信信号的前馈调节形式,建立必要补偿处理机制,使Linux嵌入内核得到妥善安置,实现对通信协议栈的移植与配置处理。
2.2 通信数据的根文件创建
对于嵌入式前馈补偿系统来说,通信数据根文件创建是必不可少的处理环节,可直接提取嵌入式内核中的移植协议栈,将既定空间光通信信号投射至旋转变压器的半页组织中,在直流伺服电机的作用下,角编码器不断旋转,直至通信显示屏中的前馈补偿输出波形态逐渐趋于稳定[14]。General Configuration编码标注了通信数据根文件的起始创建节点,随着系统内信号前馈补偿调节时间的延长,嵌入Linux内核的移植协议栈数量开始逐渐增加,一部分数据通信信道被空间点光源信息占据,使得Installation Options编码能够时刻掌握通信数据的变动形式。当已配置移植协议栈完全嵌入Linux内核时,Init Utilities编码直接输出最终的通信数据根文件信息,以供其它系统硬件结构的直接调取与利用[15]。

图7 通信数据根文件创建界面
2.3 补偿调制传信率计算

(1)
式中,δ代表前馈补偿系统为空间光通信信号赋予的激光载体传输参量,χ代表光通信数据的功率放大系数,α、β分别代表两个不同的通信数据光信号传输夹角,sinα、sinβ、cosα、cosβ分别代表与之相关的夹角正弦与余弦值。
2.4 前馈脉冲调制

(2)

3 实验结果与分析
为验证基于嵌入式空间光通信系统前馈补偿系统的实际应用价值,设计如下对比实验。设置多种空间光通信环境,分别以搭载前馈补偿系统、光电伺服系统和ARM型调控系统的控制主机作为实验对象,多次更改空间点光源通信信号的入射频率,直至显示屏中的输出波段完全趋于稳定。
3.1 实验方法
在同一位置设置三个频率不同的入射主机,如图8所示,入射信号所包含的光通信数据总量从左至右依次为5.0×1011T、7.0×1011T、9.0×1011T。显示屏前设置三个信号接收器,负责收集实验检测所需的空间光通信信号,如图9所示,各接收器只能接收与之对应入射主机中的输出光通信信号。

图8 空间点光源通信信号入射

图9 信号显示接收屏
3.2 实验结果
在实验过程中选取10个补偿位置作为数据记录节点,任意两相邻节点间的间隔时长完全相等。下表反映了光通信参量分别等于5.0×1011T、7.0×1011T、9.0×1011T时,目标空间光通信数据的实时捕获速率。
对比表1、表2、表3可知,光通信参量的数值级别水平越低,目标空间光通信数据的实时捕获速率也就越快。单看前馈补偿系统的数值,整个实验过程中的最小值为7.1 T/mm、最大值为7.8 T/mm,二者间差值为0.7 T/mm,光通信参量等于7.0×1011T时,在前馈补偿系统中,目标空间光通信数据的实时捕获速率始终保持稳定。光电伺服系统的全局最小值为3.3×1011T、最大值为6.2×1011T,二者间差值为2.9×1011T,与前馈补偿系统数值相比,差值水平较高,但极值水平却相对较低。ARM型调控系统的全局最小值为4.0×1011T、最大值为6.5×1011T,二者间差值为2.5×1011T,与前馈补偿系统数值相比,依然呈现差值水平上升、极值水平下降的变化趋势。

表1 空间光通信数据捕获速率(5.0×1011T)

表2 空间光通信数据捕获速率(7.0×1011T)

表3 空间光通信数据捕获速率(9.0×1011T)
3.3 结果分析
综上可知,随着基于嵌入式空间光通信系统前馈补偿系统的应用,目标空间光通信数据实时捕获速率明显加快,这是由于所设计系统采用了嵌入式光放大器实现空间光输入与输出信号自由转换,完成通信数据的扩大处理,使前馈补偿系统中的输入信号参量趋于稳定状态,并通过脉冲调制前馈补偿系统准确、稳定运行。
所提基于嵌入式的空间光通信系统前馈补偿系统不仅满足了光通信系统对于目标数据的快速捕获需求,也实现了对各级通信设备间动态跟踪误差的有效抑制。
4 结束语
与光电伺服型与ARM型调控系统相比,基于嵌入式的空间光通信系统前馈补偿系统联合了并串转换电路、波分复用器件等多个硬件执行设备,在精准配置Linux移植协议栈的同时,创建多个通信数据根文件,解决了补偿调制传信率不达标的应用问题。从实用处理的角度来看,随光通信参量实值水平的提升,系统通信数据的实时捕获速率也开始加快,实现了对各级通信设备间动态跟踪误差的定向化缩小。
