智能巡检机器人技术在水电站的设计应用
2021-02-21田方王飞刘礼华
田方 王飞 刘礼华

摘要:本文以减小巡检人员劳动强度,保障巡检人员人身安全,提升电站智能化智慧化技术水平为目标,通过对机器人巡检技术发展现状及电站人工巡检制度的现实需求、电站环境特点等的分析,提出一种智能巡检机器人系统在水电站的应用方案。
关键词:智能化;巡检机器人;人工巡检;设计应用
1前言
近年来国家重点推动水电工程设计、建设的数字化、网络化、智能化,充分利用物联网、云计算和大数据等技术,研发和建设数字流域和数字水电,促进智能水电厂、智能电网、智能能源网友好互动。随着机器人技术的不断发展完善,智能巡检机器人系统在水电站进行了应用试点,但在水电站巡检领域尚未实现广泛成熟的应用。本文根据水电站巡检需求、电站环境特点以及机器人技术发展现状提出一套适于水电站的智能巡检机器人系统实施方案。智能巡检机器人技术在水电站的设计应用将为提升水电站智慧化水平、实现精细化管理、降本增效提供重要的手段,从而全面提升发电企业核心竞争力。
2设计背景
机器人技术及其智能识别、驱动器技术、设备检测监测感知技术等在水电站站的应用实施,对促进水电站数字化信息化水平,提高电站安全预警防控能力及突发事件应急处理能力、加快信息技术与安全生产深度融合等具有重要意义。
2.1实施的可行性及必要性
2.1.1智能巡检机器人技术的成熟
随着人工智能技术迅速发展,机器人、计算机领域的相关技术日趋成熟。工业机器人长时间稳定巡检、多种探测技术监测、分析、识别且受环境因素影响低等优势逐步凸显。以人工智能技术为契机,创新发展水电站运营管理新模式,利用“机器人”“智能视觉”等新技术为水电站安全运维发展开创新的方向。
2.1.2水电站人工巡检存在的弊端
目前水电站巡检方式主要依靠人工进行定时检查、驻点值守。一方面,依靠人工检查容易受到个人经验、主观意识的影响,同时受到监测手段、数据记录、数据分析方面的制约,往往花费大量人力而不能得到有效的数据结果。而人工巡检采集到的数据信息范围、准确性、实时性等方面均存在不足,采集到的数据难以数字化、系统化,无法实现对设备的运行状态、检修维护等方面进行全面综合分析,并制定出检修计划、维护方案等高级功能;另一方面,人工巡检还存在一定的安全风险,且随着设备使用年限的增长,设备故障率逐步增高,需要投入更多的人力物力进行巡检、维护,运维成本随之大幅度增加。
因此人工巡检工作实施效果存在诸多不足且巡检工作质量难以稳定保障。
2.1.3电站自动化系统存在的监测盲点
水电站发展已进入智能化智慧化建设加速推进的新阶段,而目前现有的传感器技术对于漏水、漏气、漏油、局部放电、机械异形、线路异物等状况监测尚无成熟有效的解决方案。人工巡检受巡检班次、间隔时间等因素制约,往往不能及时发现并处置。
2.1.4运维人员编制精简,加强电站管控
随着电站智能化智慧化相关技术的不断应用、成熟、发展以及集控中心的建立各电站运行维护人员数量配置逐步精简。大量现场巡视工作与逐步精简的人员配置存在较为突出的矛盾。
引入机器人巡检系统,利用机器人集成最新的机电一体化和信息化技术,替代人工对水电站设备进行全面高频次巡检,确保设备自主化安全可靠运行,提升智能巡检管理水平,提高巡检过程的可控性。实现巡检人员部分或完全的替代有利于电站运行维护人员数量的减少,降低劳动强度,降低运营成本。
3设计目标
3.1安全运维技术创新
在智能巡视机器人替代人工现场巡视的基础上,充分利用图像识别、红外热成像、声音采集分析等技术,完善现地巡检信息采集范围以及数字化水平。有机结合智能化电站管控一体化平台,使巡检机器人系统充分参与到电站管控平台对电站运行维护的智能分析决策中,提升电站智能运检水平。
3.2安全巡检、覆盖全面
水电站设备众多、巡检区域范围广,在布置有高电压电气等设备的区域对人身安全存在一定的安全隐患。对于海拔三千米以上的电站,高寒缺氧环境恶劣的地区,对于巡视人员的安全危害的可能更大。而巡检机器人在满足运动、防护、安全的條件下,可以不受上述因素的影响,巡检区域完全覆盖全部电站枢纽建筑物,避免环境及设备等对巡视人员的危害的可能。
4系统功能设计
4.1系统概述
水电站巡检机器人系统基于机器人自主运动平台搭载多组高性能传感器实现图像采集、语音对讲、局放检测、环境采集以及智能导航与避障、充电等功能,系统后台实现的综合信息智能分析等功能。
4.2系统设备
智能巡检机器人系统,主要包括:各型机器人(轮式机器人、履带式机器人、轨道式机器人)充电单元、监测平台(包括服务器、平台软件)组成。如图4-1所示机器人将巡检的数据通过专有的数据网络上传到监测平台实现设备异常预警、安全管控及数据智能分析等功能。
4.3通信网络平台
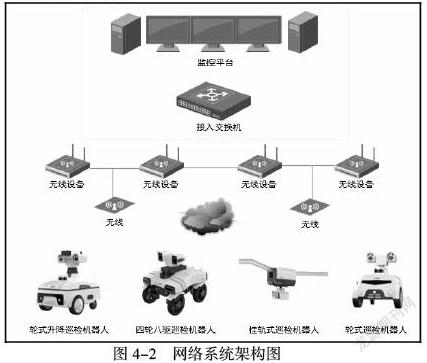
智能巡检机器人系统采用有线及无线通信方式,配置网络交换机及若干个无线路由器组成局域网(如图4-2),监测平台及巡检机器人通过有线网络及无线网络设备连接。
巡检机器人系统站内通信主要采用无线传输方式,即巡检机器人本体采集的相关信息、数据通过站内专用无线AP网络与站控终端系统进行信息交互。无线通信网络平台应具备较高的抗干扰性,适应电站高电压、大电流、强电磁场的特殊环境,进行稳定高速的信息传输。
4.4巡检机器人形式及数量的选择
目前巡检机器人系统机器人载体主要包括轮式机器人、导轨式机器人及履带式机器人等形式。由于电站枢纽的建筑较为复杂,现阶段单一类型
的巡检机器人尚不具备应对多种枢纽结构的能力。因此,需根据电站建筑物不同高程、不同设备间,配置不同类型的巡检机器人。如在主厂房发电机层、母线层、水轮机层、蜗壳层、GIS室、主变平台、升压站等位置配置轮式机器人,在坝区边坡等位置设置导轨式机器人。
不同层高及不同区域的机器人配置数量,需考虑满足巡检周期、巡检时长以及巡检机器人巡航能力那等多种因素,确定巡检机器人的配置数量。
5总结
智能巡检机器人技术在水电站的应用是对电站传统巡检模式的创新。实现利用现有成熟机器人技术替代人工完成电站巡检工作。智能巡检机器人系统通过“状态跟踪、状态评价、风险分析、科学决策、综合协调”等过程,提升电站智能化、精细化运行管理水平,极大的确保提升生产系统运行的可靠性。
随着机器人巡检技术的不断升级完善,将最终全面取代人工巡检制度。同时机器人巡检技术的应用、成熟也会极大的促进提高水电站智能化智慧化的技术水平。
参考文献:
[1]宋政昌,周成龙,张述清,康智明《清淤机器人在暗涵疏浚工程中的应用》西北水电2020年第S1期
[2]刘庆宇《室内电力巡检机器人系统设计与实现》合肥电子科技大学2015
[3]关志鹏,张波《工业移动机器人无线电能传输技术的发展与应用》广东电力2019年第8期
[4]黄金魁《新型工业化在变电运检系统中的应用》新型工业化第9卷第11期
[5]段坚《工业机器人视觉系统的研究》华北电力大学2013年
