基于无人机图像识别技术的输电线路缺陷检测
2021-02-21马艺峰
马艺峰
摘要:近年来,随着经济的不断发展,各地区的电力需求迅速增加,电网规模也在扩大。由于输电线路分散、断裂、绝缘子损坏等原因造成的输电故障,给企业和工业生产造成了不可挽回的经济损失,给人们的日常生活带来了极大的不便。因此,有必要对输电线路进行定期安全检查。由于输电线路地形复杂、交通条件不方便、高寒气候恶劣,传统的人工检查输电线路存在时间长、人力物力消耗大、检查人员安全保障低、人员技能限制检查结果等问题。
关键词:无人机;输电线路;深度卷积神经网络算法;缺陷图像识别
针对无人机巡检输电线路过程中,存在人工识别缺陷图像工作量大、效率低的问题,利用深度卷积神经网络算法开发无人机巡检数据智能管理平台,满足无人机飞行作业管理应用的需要。利用无人机巡视输电线的便利性,探究了基于无人机图像识别的无人机立体智能巡检应用平台的系统结构,采用深度卷积神经网络算法对无人机日常巡检产生的海量图像或视频数据进行预处理识别。
一、无人机立体智能巡检运用平台
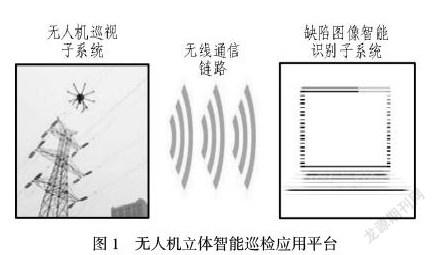
无人机立体智能巡检应用平台包括“无人机巡视子系统”,“无线通信链路”和“缺陷图像智能识别子系统”3个部分,如图1所示。“无人机巡视子系统”和“缺陷图像智能识别子系统”通过“无线通信链路”进行数据的传输。在应用層通过接口组件方式与第三方系统平台实现应用集成、界面集成、数据集成,以满足基于无人机的输电线路巡检业务应用需求。“无人机巡视子系统”包括无人机飞行控制和数据管理两个过程。其中,无人机飞行包含从地面飞行至高压输电塔等巡视目标以及从巡视目标返回地面两个过程,涉及禁飞区域的识别、飞行路线的确定和障碍物避险等。数据管理是指无人机飞行至巡检目标时采集数据的阶段,其中包括数据采集、数据传输、数据储存与数据清除四个部分。“无线通信联路”负责传输无人机飞行控制信号、无人机高清相机控制信号和高清数据的回传控制信号等,分别实现无人机实时的飞行操作控制、图像视频的拍摄控制及实时高清数据的回传。通过研发适用于无人机实时传输的4G无线专网通讯装置,实现了基于4G无线专网的输电线路巡检数据自动化采集技术。
图1无人机立体智能巡检应用平台
进而解决了在4G专网环境下,以无人机为主的智能装备在巡检过程中所采集的照片数据、视频数据以及GPS位置等信息的实时传输与安全传输的问题。“缺陷图像智能识别子系统”接收到实时数据后,实现高压输电塔和输电线实时数据的显示。同时,利用深度卷积神经网络算法对数据进行预处理分类识别。并对图像有缺陷的位置进行标注,最终将识别结果反馈,指导检修消缺决策。与此同时,将结果和原始图像数据进行备份,并通过4G网络发送给控制中心,由专家对结果进行人工确认。
二、输电线路缺陷图像检测
深度学习模型采用层次化特征的表达方式对图像进行描述,主要包括受限玻尔滋蔓机制、深度信念网络、自动编译器、卷积神经网络和生物启
发式模型等。利用深度卷积神经网络算法对电力设备巡检产生的海量图像或视频数据进行预处理,优化分析与分类识别。并对图像有缺陷的位置进行标注,最终将识别结果反馈,指导检修消缺决策。此外,还可结合专家反馈对识别模型进行优化,逐步提升缺陷查找效率及准确率。通过建立深度学习监督训练,鸟巢、绝缘子自爆、销钉脱落、螺栓松动、均压环倾斜塔材缺失、异物、导地线损伤的智能识别。
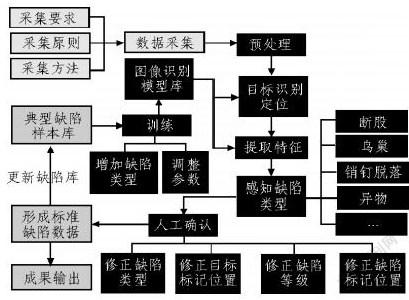
1.典型缺陷图像智能解译体系。典型缺陷图像智能解译体系具有自学习能力,能在实际应用中通过数据积累不断的提高智能识别的精度,最终达到项目目标要求。典型缺陷图像智能解译体系流程图,如图2所示。
基于深度学习的输电设备典型缺陷图像智能解译体系:首先使用多目标识别算法从无人机巡检照片或视频中识别出目标设备;然后,使用深度学习分类器对目标设备是否有缺陷以及缺陷类型进行判断。基于深度学习的输电设备典型缺陷图像智能解译方法包括如下步骤:(1)Faster-Rcnn样本制作。将一定规模的无人机输电线路巡视图像(1000张以上)进行人工标注,标出图中所有的输电设备名称和位置。从中随机选取总数9/10的图片作为训练数据集,另外的1/10图片作为测试数据集。(2)Faster-Rcnn模型训练。将步骤(1)带有标签的数据输入到Faster-Rcnn中对模型训练。训练使用随机梯度下降方法对模型参数进行更新,迭代20万步,最终完成模型训练。(3)Faster-Rcnn模型测试与修正。使用步骤(1)的测试数据集对训练完成的Faster-Rcnn模型进行测试,得到其准确率。依据准确率高低判断是否要添加数据和更改训练参数继续训练模型。(4)输电设备缺陷分类器样本制作。针对每一种输电设备,收集包含正常输电设备与存在缺陷的输电设备的样本,并为每张图片打上缺陷种类标签。取总数9/10的图片作为训练数据集,另外的1/10图片作为测试数据集。(5)训练输电设备缺陷分类器。针对每一种输电设备训练分类器使用步骤(3)中制作的训练样本数据训练分类器。(6)输电设备缺陷分类器测试与修正。针对每一种
输电设备的缺陷分类器,使用步骤(3)中的测试数据测试其准确率。依据准确率高低,判断接下来是否需要添加样本或修改训练参数继续进行训练。(7)模型使用。将(1)~(6)步骤训练好的FasterRcnn模型以及针对每种输电设备的缺陷分类器组合使用。将每次无人机巡检得到的输电线路设备照片首先送入Faster-Rcnn提取出其中包含输电设备的区域,并判断每块区域所包含的输电设备的种类。然后,依据种类将其送入该种设备的缺陷分类器,判断是否具有缺陷及缺陷类型。若有缺陷,则将缺陷设备所在位置以及缺陷类型,在输电线路设备照片中标注出来。(8)模型参数更新。在已有的机器识别结果中抽取部分典型的图片,重新制作新的训练样本。在原有模型的基础上不断更新Faster-Rcnn以及缺陷分类器的模型参数,使得模型不断优化,准确率不断提高。
2.基于Faster-Rcnn算法的多目标物体识别方法。多目标物体识别方法,采用Faster-Rcnn算法,可以同时从一张无人机巡检图片中识别出所有需要进行缺陷识别的设备,且精确找出目标在图片中的位置。Faster-Rcnn算法主要分为3个步骤:1)使用卷积神经网络从原始图片中提取图片的卷积特征。2)使用RegionProposalNetwork提取可能存在目标设备的候选区域。3)针对步骤2)中提取的候选区域,使用ROIpoolinglayer(ROIpoolinglayer层将每个候选区域的特征图均匀分成M×N块,对每块进行maxpooling)
从原始图片的卷积特征图中提取特征向量,将每个候选区域的特征向量送入分类器进行分类,判断其所属的设备种类。同时,精确回归出包含输电设备的矩形区域的坐标。
3.卷积神经网络模型。卷积神经网络模型属于多层的神经网络,每一层的神经网络由多个二维平面构成,每一个平面又包含多个神经元。一般,包含卷积操作和池化操作。卷积神经网络的输入是数字图像,之后卷积层和池化层交替进行。卷积神经网络能通过两种方式降低参数的数目,分别是局部视野感知与参数共享。卷积层得到的特征图即为,输入图像和卷积核运算加上一个偏置后再通过激活函数所得的结果。
总之。无人机立体智能巡检应用平台研究关键点及难点在于,基于深度卷积神经网络算法的巡检图像输电设备缺陷识别技术研究。该技术针对输电杆塔的高清图像,利用Faster-Rcnn算法完成对输电设备缺陷的自动识别,并进行缺陷种类的分类。从而能够极大程度上缩小人工识别缺陷图像的工作量,且提高了巡视效率和质量。
参考文献:
[1]张萍.输电线路缺陷在线监控系统设计与实现.2018.[2]韩小方.基于无人机图像识别技术的输电线路缺陷检测的分析.2019.
