航班受GPS干扰导致ADS-B地面站输出位置异常现象研究
2021-02-19易振宁









摘 要:ADS-B系统因其具有建设和维护成本低,定位精度高,数据更新率高等优点而在民航监视领域中大放异彩,其安全运行已经成为影响中国民航活动正常开展的重要因素。但ADS-B地面站设备和机载设备易受电磁干扰,且自从ADS-B信号正式接入自动化系统提供监视服务后,ADS-B设备受到干扰事件屡见不鲜。文章通过研究航班受GPS干扰导致ADS-B地面站输出位置异常现象,总结了相应类似异常事件的处理经验。
关键词:ADS-B;GPS干扰;自动化系統;偏航
中图分类号:TN929.5;V355.1 文献标识码:A文章编号:2096-4706(2021)13-0045-06
Study on the Phenomenon of Abnormal Output Position of ADS-B Ground Station Because of the Flight is Being Disturbed by GPS
YI Zhenning
(Guilin Air Traffic Management Station of Civil Aviation of China, Guilin 541106, China)
Abstract: ADS-B system shines brightly in the field of civil aviation monitoring because of its advantages of low construction and maintenance cost, high positioning accuracy and high data update rate. Its safety operation has become an important factor affecting the normal development of civil aviation activities in China. However, ADS-B ground station equipments and airborne equipments are vulnerable to electromagnetic interference. Since ADS-B signal is officially connected to automation system to provide monitoring service, ADS-B equipment is frequently disturbed. By studying the phenomenon of abnormal output position of ADS-B ground station because of the flight is being disturbed by GPS, this paper summarizes the handling experience of corresponding similar abnormal events.
Keywords: ADS-B; GPS interference; automation system; yawing
0 引 言
广播式自动相关监视(Automatic Dependent Surveillance Broadcast, ADS-B)系统由于其建设成本低(地面站成本约为传统二次雷达的九分之一),维护成本低,使用寿命长,定位精度高(可达10 m量级),数据更新周期快(1秒1次)等优点,已经逐渐在民航监视领域中占据重要地位。我国把加快完善ADS-B建设纳入民航发展“十三五”规划实施工作中,在“十三五”末期,全国所有航路、终端区及机场几乎都已具备ADS-B运行能力[1]。
在2020年中,中国民航已全面启动全国ADS-B管制运行,ADS-B信号正式接入到自动化系统中,为管制及其他用户提供监视服务。而在中、长期发展计划中,我国已确立ADS-B技术作为中国民航主要的监视手段。因此,ADS-B设备的安全运行已经成为影响中国民航活动正常开展的重要因素。
而近年来,随着ADS-B设备的大面积铺设,ADS-B地面设备和机载设备易受干扰的缺点也渐渐凸显出来,各地ADS-B设备受到电磁干扰、人为模拟假目标干扰、GPS干扰等报告屡现不穷,对各地民航空中交通管理部门技术保障部门的技术保障能力提出了更高的要求。本文通过分析近期桂林空管站出现的ADS-B机载设备受到地面GPS干扰器干扰导致其下发位置数据异常,最终致使自动化系统融合航迹出现偏航现象的事件,总结了相应类似异常事件的处理经验,期望能为民航技术保障人员在相关事件的处理中提供一些参考。
1 异常现象描述
2021年3月3日10点31分左右,在桂林机场准备降落的航班号为FZA6559,二次代码为A0140的航班在莱斯自动化系统显示终端上显示的融合航迹出现偏离航路现象,过程持续约2分钟,于10点33分左右恢复正常。由于目标跳变的位置处于最低安全高度告警区且偏离航向道,触发了最低安全高度告警和进近下滑道监视告警。技术保障人员在自动化系统中通过回放查看单路信号航迹,发现是由于ADS-B信号位置数据异常引起的,莱斯自动化不同监视源显示对比如图1所示。
2 现象分析
2.1 融合航迹偏航分析
桂林自动化系统引入了多路雷达信号和ADS-B信号,形成融合航迹后,显示于管制员席位终端上。信号路由如图2所示。
主用自动化系统型号为南京莱斯NUMAN3000,运行版本为V3.2。其多监视源信号融合算法机制为:
(1)通过参数SDP_CREDIBLE_OF_RAD_ADSB来判断雷达信号与ADS-B信号的可信度。
(2)假如ADS-B信号的可信度比雷达信号的高,则融合航迹直接取ADS-B信号数据,而抛弃雷达数据信号,反之亦然。
(3)若ADS-B信号的可信度与雷达信号的可信度一致,系统在设计时考虑了ADSB的精度对合成航迹的影响,在可信的ADSB信号参与融合下,融合航迹的位置计算优先与ADSB报告位置保持一致,没有调入滤波程序去计算位置。
事件发生前,ADS-B信号较稳定,为保障低空雷达盲区的覆盖,数据站、自动化系统均未设置过滤低位置精度数据,因此低位置精度ADS-B数据得以进入自动化系统产生融合,又由于ADS-B信号可信,融合航迹直接与ADS-B信号位置保持一致,而又未经过滤波,最终导致融合航迹偏航。
2.2 ADS-B信号位置数据异常分析
进入自动化系统的ADS-B信号是由各远端地面接收站接收后将各路CAT21报送至数据站融合后产生的。在数据站QOS终端回放查看有监视到相应事件发生地点的单路远端接收站信号,发现猪练塘定向站、猪练塘全向站、尧山全向站三个地面站均有监视到该异常目标,而且该目标在三个单路地面站信号流中均出现相同偏航现象。由此可大致推断异常现象可能是由于机组下发位置数据异常导致。
提取上述三个地面站记录的CAT21目标报文数据进行解析,定位至异常发生时间点,发现报文中的目标位置确实向西偏离航线1.6千米左右。进一步查看数据质量指示项(Quality Indicators),发现在偏航时间段内目标下发的导航位置不确定类别(Navigation Uncertainty Category for position, NUCP)的值為0,而其他正常时间段内,该值为6或7,偏离航线起始位置与结束位置如图3、图4所示。
ADS-B CAT21报文中的位置信息及其质量指示均来自GPS系统。而对GPS系统来说,其定位信息的完好性和精度分别通过水平保护门限(Horizontal Protection Level, HPL)和水平位置质量因子(Horizontal Figure of Merit, HFOM)来衡量[2]。其中HPL定义为以GPS定位位置为圆心的圆半径,可保证在特定概率下(通常定义最大漏检概率为10-7)机载GNSS系统的真实位置必定落入该圆中。而HFOM定义为以GPS定位位置为圆心的圆半径,可保证在特定概率下(通常为95%)机载GNSS系统的真实位置必定落入该圆中。两者定义类似,但是用途不同,HPL主要用于确定两架飞行器之间的安全飞行间隔,与水平告警门限(Horizontal Alarm Limit, HAL)相比可确定接收机自主完整性检测(Receiver autonomous integrity monitoring, RAIM)是否可用,而当飞行器之间的距离间隔达到HFOM时,两者已经有一定可能性发生相撞,HPL和HFOM定义图解如图5所示。
图5 HPL和HFOM定义图解
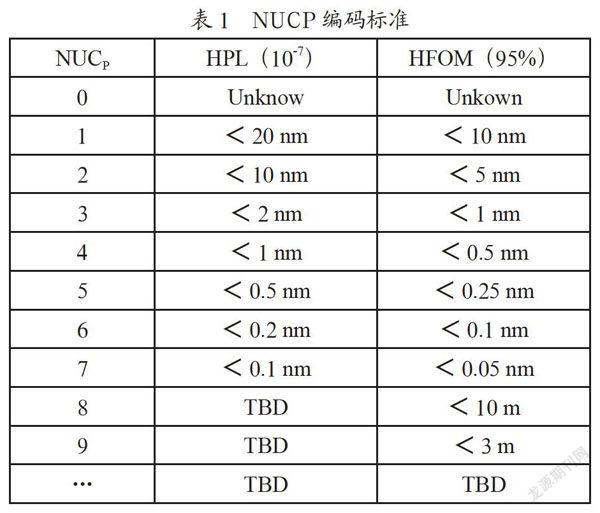
为压缩飞机下发信息的数据量,RTCA DO260标准中定义了导航位置不确定类别NUCP,用于对水平位置数据的完好性和精度进行编码。在随后发布的DO260A和DO260B标准中,已经被导航完整性类别(Navigation Integrity Category, NIC)、监视完好性水平(Surveillance Integrity Level, SIL)及导航精度类别(Navigation Accuracy Category, NAC)所替代[3,4],以满足用户对位置信息精度和完好性更高的要求,但目前并非所有的机载ADS-B设备都能支持DO260A或DO260B标准。NUCP编码标准如表1所示[5]。
《广播式自动相关监视(ADS-B)管制运行规程》中明确规定,ADS-B位置报告数据的NUCP值不得低于5,如果低于5,若在管制员人机界面上显示ADS-B位置报告时,应当对管制员给出视觉提示,或者在管制员人机界面上不显示其位置报告。
当NUCP的值为0时,表明该目标下发的水平位置信息不可用,其位置精度过差因而导致目标显示偏航。
由于异常现象存在区域性,考虑该区域内存在GPS干扰源。
3 GPS干扰分析
导航星全球定位系统(Navistar Global Positional System,GPS)有21颗工作卫星和3颗在轨的备用卫星,它们平均配置在六个轨道上。GPS卫星主要发射用伪随机码调制的已调制信号,载波为L波段的两种频率信号,L1为1 575.42 MHz,L2为1 227.6 MHz,其中调制信号为测距码和导航电文两种,而测距码又包括C/A码和P(Y)码。目前民用的频段为L1频段,而测距码使用C/A码。GPS接收机先通过接收来自卫星的导航电文,利用其中包含的星历资料计算卫星位置;然后利用测距码测量测者到卫星的距离;最后解算导航方程解出测者位置的经纬度,计算三维坐标加上用户钟差,至少需要4颗卫星[6]。
机载GPS接收机主要接收L1频段的C/A码和导航电文,载波中心频率为1 575.42 MHz,带宽为20.46 MHz。下面粗略计算到达地面的GPS信号强度。
设卫星至地面的平均距离为D=20 000 km,则其L1频段(F=1 575.42 MHz)已调制波信号经由自由空间传播的衰减为:
L(dB)=32.44+201lgF+201gD=182.4 dB (1)
按照GPS系统设计指标,L1频段的C/A码信号的发射有效通量密度(Effective Isotropic Radiated Power,EIRP)为P=56.8 dBm[7],若大气层衰减为A=2.0 dB,则GPS系统L1频段C/A码信号到达地面的强度为:
Pc/a=P-L-A=56.8-182.4-2=-127.6 dBm (2)
由此可知,GPS卫星发送的已调制信号到达地面时信号微弱,本例中被干扰的飞机在被干扰区域已经下降至400 m高度,极易受到大功率GPS干扰器的压制式干扰。
4 GPS干扰源处理
联系广州通信网络中心相关技术人员,使用其研制出的基于ADS-B信号的航空器GPS干扰识别工具,通过提取航空器下发的ADS-B目标报文内的质量指示数据项,对低质量的目标位置进行标注,再利用热力图技术和百度地图API,制作出如图6所示的GPS干扰源热力图,極大地缩小了干扰源排查区域。
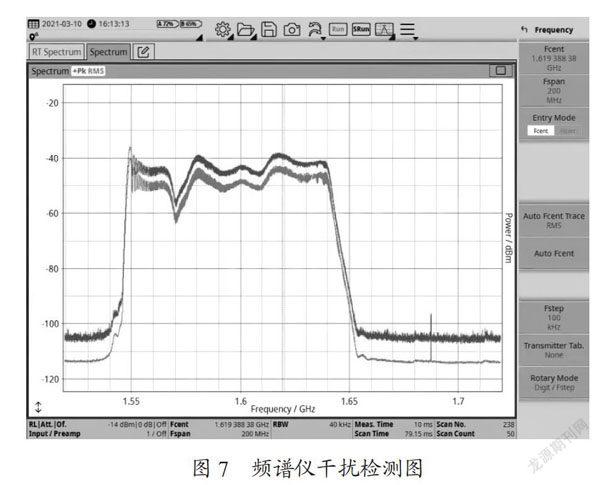
向广西桂林市无线电监测中心发送GPS干扰投诉后,无线电监测中心联合机场公安、桂林空管站等部门人员前往热力图定位的干扰地区进行排查。通过使用NARDA Signalshark S3310频谱仪对干扰源进行多点检测以及交叉定位,最终将干扰源锁定在一台大型挖掘机上,确定干扰源为安放在该挖掘机上的GPS屏蔽设备。拆除该屏蔽设备后,GPS干扰随之消除。
从图7中可知,GPS干扰器发射的干扰信号强度大、频带宽,完全覆盖了L1频段,并压制了GPS信号,挖掘机上安装的GPS干扰器实物图如图8所示。
5 空管技保部门应对措施
由于在雷达管制区域雷达和ADS-B混合应用实施的年限尚浅,设备生产厂家及空管技术保障部门对很多潜在的危险源无法有效预估,需要时间来积累经验并改进服务性能。空管技术保障部门应对航班受GPS干扰危险源进行管控,可通过两方面进行:一方面是设备因素,比如在ADS-B目标传输链路上进行过滤设置,另一方面是管理因素,应建立完善的ADS-B故障应急处置流程,并应组织技术保障人员对异常现象进行学习和积极讨论,总结处理经验。
5.1 设备过滤设置
ADS-B目标传输链路主要有三个环节:ADS-B地面站、ADS-B数据站、自动化系统。目前桂林地区使用的地面站为ADS-B地面站,为四川九洲公司生产的JZDAK01RM型号设备,ADS-B数据站为南京莱斯公司生产的NUMAN2000型号设备,主用自动化系统为南京莱斯公司生产的NUMAN3000型号设备。
由于不同版本标准下的ADS-B位置报告数据精度指标不同,建议同时设置过滤。
5.1.1 地面站过滤设置
目前ADS-B地面站设备技术标准主要有RTCA DO-260系列《1 090 MHz扩展电文ADS-B和TIS-B最低运行性能标准》,EUROCAE ED-129《1 090 MHz扩展电文ADS-B地面站技术规范》,MH/T 4036-2012《1 090 MHz扩展电文广播式自动相关监视地面站(接收)设备技术要求》,《1 090 MHz扩展电文广播式自动相关监视地面站(接收)设备测试要求》(AC-115-TM-2012-02)等,这些标准内均未要求地面站具备对GNSS完好性和精度不足的目标报文进行过滤输出的能力。参照以上技术标准生产的现役四川九洲公司JZDAK01RM型号的ADS-B地面站设备未提供针对GNSS完好性和精度不足的目标报文进行过滤输出的功能。
5.1.2 数据站过滤设置
目前我国并未发布针对ADS-B数据站设备技术要求的行业标准,可参照的文件主要有咨询通告《民用航空ADS-B数据处理中心系统运行最低功能与性能要求》(AC-115-TM-2014-02)、咨询通告《民用航空ADS-B数据处理中心系统配置要求》(AC-115-TM-2014-01)、《广播式自动相关监视(ADS-B)管制运行规程》(AC-93-TM-2011-01)、《中南地区广播式自动相关监视(ADS-B)系统监视服务指导原则(初稿)》、《中南地区空管系统ADS-B管制运行指导材料》等。上述文件中有明确要求数据站可对GNSS完好性和精度不足的ADS-B信息进行过滤,指标应包括NUCP、NIC&SIL等质量指标数据项,对于不同版本的ADS-B机载设备,可应用不同的指标。
南京莱斯公司生产的NUMAN2000型号三级数据站可支持对每一路ADS-B地面站信号进行低质量信息过滤,为应对GPS干扰等影响管制活动正常进行的情形,应对低质量信息设置过滤,莱斯ADS-B数据站过滤设置如图9所示。
5.1.3 自动化系统过滤设置
《中南地区广播式自动相关监视(ADS-B)系统监视服务指导原则(初稿)》中明确要求:自动化系统应能将多监视源信息进行融合处理;同时可通过参数设置对于ADS-B位置报告数据精度指标(NUCP、NACP、NIC、SIL)低于运行设定标准的报文进行丢弃,不参与融合计算;若不予以丢弃,针对低质量的ADS-B信号,应给予明确的视觉提示。
目前桂林主用莱斯NUMAN3000自动化系统运行版本为V3.2,与NUCP相关的参数有ADSB_NUCP_CHECK和ADSB_NUCP_LIMIT。ADSB_NUCP_LIMIT设置过滤门限值。ADSB_NUCP_CHECK可设置为0、1或2:0表示不过滤;1表示不过滤,但对低质量ADS-B数据进行告警提示;2表示过滤低于门限值的ADS-B数据,因此上述两项参数应分别设置为5和2。莱斯自动化系统过滤设置如图10所示。
5.2 与厂家积极沟通
从之前的分析发现,莱斯自动化的融合机制存在缺陷,与厂家积极沟通与反馈,考虑优化融合机制,以处理低质量的ADS-B数据。
5.3 制定完备的处置方案
应制定ADS-B信号位置报告数据精度下降和信号中断的应急处置方案并联合管制部门制定在雷达管制区域内雷达与ADS-B混合应用场景下的ADS-B运行方式开启和退出时设备保障的联动方案。
5.4 加强技术保障力量
可组织技术保障人员梳理ADS-B信号传输链路上各相关设备的参数,深入了解并掌握相关参数配置操作,熟记应急处置流程以提高异常事件反应能力及设备维护能力。
可定期执行相应应急演练方案,以强化值班人员现场应急能力。
6 结 论
本文仔细梳理了ADS-B机载设备受到GPS干扰事件中的各项环节,详细整理了ADS-B信号传输链路上涉及的工作机制,并提出了几项空管技术保障部门可采取的措施,期望能为类似干扰事件提供一些参考。
参考文献:
[1] 中国民用航空局.中国民用航空发展第十三个五年规划 [EB/OL].(2017-02-05).http://www.caac.gov.cn/XXGK/XXGK/ZCFB/201702/t20170215_42525.html.
[2] YAN F,MA Z. Study on Airworthiness Requirement for the Position Quality of ADS-B System [J].Procedia Engineering,2011,17:415–421.
[3] RTCA. Minimum Operational Performance Standards For 1090 Mhz Extended Squitter Automatic Dependent Surveillance-Broadcast(Ads-B) And Traffic Information Services -Broadcast(Tis-B):RTCA DO 260A-2003(INC.VolUME2-2003) [S].Washington DC:RTCA,Inc.,2003.
[4] RTCA. Minimum Operational Performance Standards For 1090 Mhz Extended Squatter Automatic Dependent Surveillance-Broadcast(Ads-B) And Traffic Information Services-Broadcast(Tis-B):RTCA DO-260B-2009(R2011) [S].Washington DC:RTCA,Inc.,2011.
[5] RTCA. RTCA DO-260/EUROCAE ED-102,Minimum operational performance standards for 1090MHz Automatic Dependent Surveillance-Broadcast (ADS-B) [S].Washington DC:RTCA,Inc.,2003.
[6] 謝钢.GPS原理与接收机设计 [M].北京:电子工业出版社,2009.
[7] NIEUWJAAR P. Lecture Series No.161,The NAVSTAR GPS System:GPS signal structur [R].NATO AGARD,1988.
作者简介:易振宁(1990.10—),男,汉族,广西桂林人,工程师,学士学位,研究方向:甚高频和雷达。