基于并行计算的智能变电站视频监控系统故障智能诊断方法
2021-02-18宁雪峰
宁雪峰
(广东电网有限责任公司东莞供电局,广东 东莞 523000)
0 引 言
当智能变电站的视频监控系统发生故障时,调度中心将失去智能变电站的远程控制能力[1,2]。更难以及时发现智能变电站视频监控系统的故障,容易造成操作失误[3,4]。对此,文献[5]分析了工业过程监控存在的故障问题,采用主成分分析技术,根据工业过程数据特点初筛历史数据,建立混合判别模型判别工业过程监控故障。文献[6]通过数据降维方法,提取原始高维数据结构特征信息,诊断间歇过程故障。文献[7]针对多动力装置主机监控存在的故障问题,设计信号采集数据库,根据采集到的数据诊断其存在的故障。文献[8]将加权t-SNE算法应用到故障诊断中,增大故障区分度,降低故障的误报率和漏报率。
将上述研究成果应用在智能变电站视频监控系统故障诊断中,存在故障辨识度低的问题,为此引入并行计算技术,提出智能变电站视频监控系统故障智能诊断方法。
1 基于并行计算的智能变电站视频监控系统故障智能诊断方法
1.1 采集智能变电站状态数据
根据智能变电站运行周期,假设智能变电站稳态运行时的基波角频率为ω1,谐波次数为n,各次谐波的余弦幅值为φcos,智能变电站当前运行时间为t,则智能变电站稳态运行过程中,一个周期函数i(t)为:

式中,φsin表示各次谐波的正弦幅值[9]。依据傅里叶级数原理,求取φsin和φcos,则有:
式中,dt表示对时间t的微分;T表示智能变电站完整运行周期[10]。综合式(1)和式(2)可以确定智能变电站n次谐波电流分量为:

综合上述式(1)—式(3)的计算结果,可以得到n次谐波电流分量的有效值In'为:

按照上述4个公式的计算过程,假设智能变电站实部的电流向量和电压向量与智能变电站虚部的电流向量和电压向量相差一个,则按照如图1所示的电流和电压向量表现形式,计算智能变电站有功功率P、无功功率Q以及功率因数ψ。

图1 智能变电站功率计算电流电压向量图
图1中,I*表示电流向量,U*表示电压向量,Ua表示a相线电压,R表示智能变电站运行电阻,X表示智能变电站运行磁场,Ia表示a相线电流,Ub表示b相线电压,Ib表示b相线电流,φ表示电流向量与电压向量产生的电势,φi表示电流i电势,φu表示电压u电势[11]。
根据图1所示的智能变电站功率计算电流电压向量图,计算智能变电站的P、Q以及ψ为:

综合上述计算公式可以得到智能变电站运行电压、电流、功率、电势以及周期等状态量变化参数,依据这些参数,即可感知智能变电站监控系统运行状态。
1.2 感知智能变电站视频监控系统运行状态
依据此次研究采集到的智能变电站状态量,感知视频监控系统监控智能变电站状态量情况,以此判断系统是否存在故障。其感知系统运行状态过程如下,一是获得智能变电站状态量,二是获得稀疏状态量信号,三是通过低速压缩采样感知得到M维向量,四是传输存储智能变电站重构信号。

式中,ΦM×N表示M×N维的测量矩阵,χN表示N维的智能变电站状态变量[12]。依据式(8)所示的系统状态量数学模型表达式,需要对χN进行稀疏处理,为此假设χN在稀疏基中的变换系数为:


假设测量矩阵Φ与基函数不相关,且M≠N,则式(8)中的系统状态量M数学模型表达式可以改写为:

1.3 划分智能变电站视频监控系统故障
依据上述计算过程,感知视频监控系统状态量,结合视频监控系统运行特点,从系统的作用域和工作模块两方面划分智能变电站视频监控系统故障。其故障划分算法如图2所示。

图2 故障划分算法
图2中,A表示作用域,B表示工作模块,fτ(·)表示故障划分执行函数。
1.3.1 作用域
将智能变电站视频监控系统划分为若干个独立工作的子作用域,且在工作过程中,每一个子作用域均具有一定的交互关系。当并行计算得到其中一个子作用域故障时,就能够依据该故障,并行诊断其他子作用域。为此将系统作用域记为诊断系统故障划分执行函数fτ(A),其中,τ表示系统故障诊断时间,则有:

式中,∧表示逻辑运算中的“与”符号;k表示作用域划分的子作用域总数[14]。
1.3.2 工作模块
视频监控系统在监控智能变电站运行时,将智能变电站分为不同的层次和模块,分区域监控智能变电站。将系统工作模块记为诊断系统故障划分执行函数fτ(B),则有:

式中,o表示工作区间划分的工作模块总数。
依据上述两种系统故障划分方法,根据视频监控系统运行方式以及并行计算单元数量,智能选择其中一种系统故障划分方法,均衡划分系统故障。
1.4 基于并行计算智能诊断系统故障
并行计算技术具有多个独立计算单元,可以执行多个线程指令,在空间域和时间域上同时计算系统故障。基于此,基于并行计算设计的系统故障智能诊断流程如图3所示。
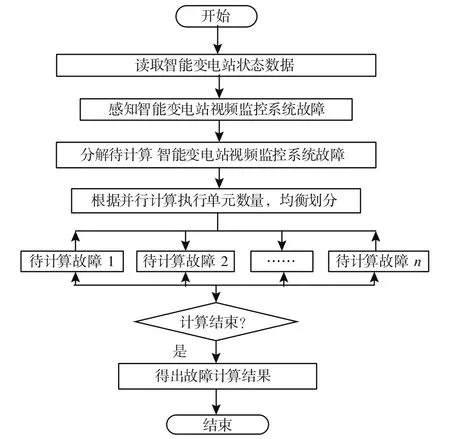
图3 系统故障智能诊断流程
图3中,在执行多个单元计算系统故障时,并行计算程序各部分数据不存在交互与迭代。
基于图3所示的系统故障智能诊断流程,结合智能变电站状态数据以及感知到的视频监控系统状态数据,划分故障诊断单元,计算每一个单元中智能变电站状态数据与视频监控系统状态数据综合相似度,其计算公式为:

2 实例测试与分析
选择基于混合型判别分析的故障诊断方法(文献[5]方法)和基于扩散距离的领域保持嵌入(Diffuse Distance Neighborhood Preserving Embedding,DDNPE)算法的故障诊断方法(文献[6]方法)作为此次测试的对比方法。以某个智能变电站视频监控系统作为测试对象。该系统的应急调度人员获取应急信息后启动应急处置流程,将应急信息、预警信息、应急响应信息以及应急值班信息作为数据来源,并保证此类信息以一定的格式通过接口实时传输到整个应急响应系统,可随时查看智能变电站视频监控系统上传的应急组织和处置信息。从而验证基于并行计算的智能变电站视频监控系统故障智能诊断方法的有效性。
2.1 智能变电站视频监控系统故障设计
选择智能变电站视频监控系统经常出现的短路、特性阻抗干扰、图像失真以及图像细节丢失4种监控故障作为此次测试故障,该4种故障在同一时间和频率下的电流、幅值、相位波动如图4—图6所示。

图4 同一时间下4种故障的电流波动
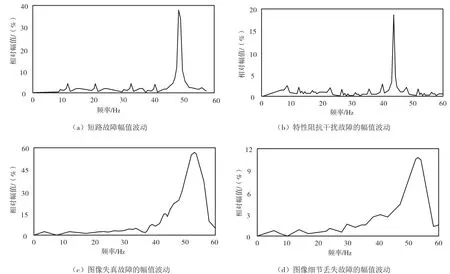
图5 同一频率下4种故障的幅值波动

图6 同一频率下4种故障的相位波动
如图4—图6所示的4种故障将同时出现在视频监控系统中,其故障相对数值如表1所示。

表1 系统故障相对数值
2.2 故障诊断结果
根据图4—图6所示的故障波动,采用3组故障诊断方法分别诊断系统故障,依据表1所示的故障相对数值确定系统故障类型,其故障诊断结果如图7所示。

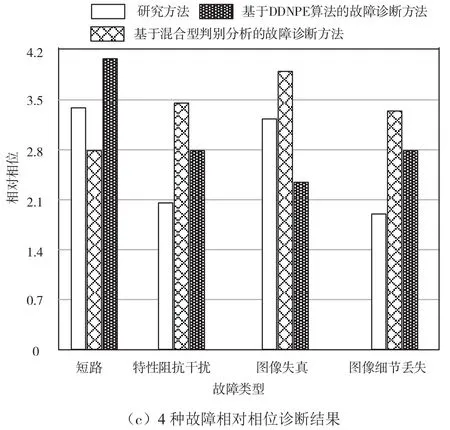
图7 4种故障诊断结果
图7中,基于混合型判别分析的故障诊断方法和基于DDNPE算法的故障诊断方法诊断系统故障,得到的4种故障相对数值与设置的系统4种故障相对数值分别存在±10 A、±20%、±25和±19 A、±15%、±18的误差,而研究方法诊断出的4种故障相对数值不存在误差。可见,研究方法可以准确诊断出智能变电站视频监控系统的故障类型。
3 结 语
此次研究提出了基于并行计算的智能变电站视频监控系统故障智能诊断方法,基于每一个子作用域之间的交互关系,结合智能变电站状态数据以及感知到的视频监控系统状态数据划分故障诊断单元。分析智能变电站稳态运行过程中的一个周期函数,充分利用并行计算程序,在空间域和时间域上并行计算系统故障,提高系统故障智能诊断效果。但由于未曾考虑系统可能出现的相似性故障,因此在今后的研究中还需深入研究故障智能诊断方法诊断视频监控系统相似性故障精度,进一步提高视频监控系统故障智能诊断方法性能。
