机器视觉的伺服控制技术简述
2021-02-18沈燕卿刘兴法
沈燕卿 刘兴法
一、前言
机器视觉通过图像摄取装置将被摄取目标转换成图像信号,即用机器代替人眼来测量和判断,它是快速发展的人工智能领域的重要分支。机器视觉的伺服控制通过对来自图像提取装置的图像信息,分析其像素分布和亮度、颜色等,提取目标特征,进而结合控制需求来控制现场的设备动作。
机器视觉易于实现信息集成,是实现计算机集成制造的基础技术。机器视觉的应用有助于提高生产的柔性和自动化程度。 在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉; 同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大幅提高生产的自动化程度和效率。
随着机器视觉技术的发展与成熟,基于机器视觉的自动监测与智能控制系统将广泛应用于电子制造、半导体、汽车、交通、工业生产等各个领域,并主要从中端生产线向前端制造和后端物流环节延伸,成为提升产业自动化水平、实现中国制造 2025 的重要技术手段。
二、机器视觉及其伺服控制技术的国内外研究现状
机器视觉包括数字图像处理技术、机械工程技术、控制技术、光学成像技术、传感器技术、计算机技术等,是一门多学科交叉融合技术。
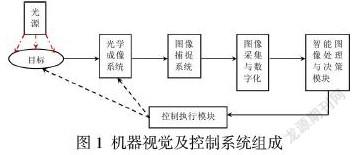
机器视觉系统主要包括三部分:图像的采集、图像的处理和分析、输出或显示。如图 1 所示,一个典型的机器视觉及控制系统包括光源、光学系统、图像捕捉系统、图像数字化模块、数字图像处理模块、智能判断决策模块和机械控制执行模块等。
其中,采用CCD 摄像机等的光学成像系统和图像捕捉系统将被摄取目标转换成图像信号,在经采集与数字化后传送给专用的图像处理与决策系统,它根据像素分布和亮度、颜色等信息,对这些信号进行各种运算来提取目标的特征(面积、长度、数量及位置等),最后根据预设的容许度和其他条件输出结果(尺寸、角度、偏移量、个数、合格/不合格及有/无等);上位机实时获得检测结果后,指挥运动系统等控制执行模块执行设定的控制操作。
通过采用视觉伺服控制,系统可以模拟人的视觉器官、对环境实施非接触量测以及便于对非结构环境和目标进行检测等。视觉伺服的一个关键问题是从三维空间到二维图象空间的未知的时变非线性变换 , 由此派生出新的视觉平面内系统的可控性、可观性以及与原系统控制性能的关系问题。
机器视觉的伺服控制可分为基于位置、图像和混合视觉控制三类。利用标定得到的图像采集系统的参数对目标位置进行三维重建,基于位置的视觉控制能通过轨迹规划求得机器人末端执行器下一周期的期望位置,进而通过控制器对机械关节进行控制。基于图像的机器视觉伺服控制一般使用多台摄像机故对对象图像进行特征匹配。混合视觉可控制在图像控制的基础上,借助超声波、激光和红外等其它类型传感器,并进行多传感信息融合,从而实现对象的识别、定位及控制。
机器视觉的软硬件产品已逐渐成为生产制造各个阶段的必要部分,这就对系统的集成性提出了更高的要求。在现代自动化生产过程中,人们将机器视觉系统广泛地用于工况监视、成品检验和质量控制等领域。随着全球制造中心向中国转移,中国机器视觉市场正在继北美、欧洲和日本之后,成为国际机器视觉厂商的重要目标市场。目前包括中国和日本在内的亚太地区占全球的比重突破 20%已经超过欧洲,位居全球第二大区域市场。
机器视觉控制系统的应用目前主要集中在检测、定位、運动控制、机器人等几个领域, 特别是在运动控制、生产流水线、诊断、测试、数控设备等几个领域的应用需求增长最为迅速。
三、存在的问题及发展趋势
机器视觉的伺服控制技术目前存在的主要问题有成像质量不足、图像处理分析算法性能不足、计算数据量大、智能化水平不高等问题。
1.成像质量不足
影响机器视觉成像系统成像质量的影响很多,主要包括:系统制造开发过程中的影响因素:成像波段的选择、成像传感器电学特性与几何特性、光机系统的优化设计、光学元件的材料质量、加工精度、系统装调精度等;系统使用过程中的影响因素:光照条件、目标材料特性、目标几何形状特性、目标表面特性、目标距离等。 以移动机器人为例,随着自身的平移及转向运动,目标与摄像头之间的相对距离姿态信息并不准确,其相对运动和摄像头自身俯仰平移运动带来的图像变形都极大影响了视觉跟踪成像的稳定性。
2.图像处理与分析算法性能不足
图像处理与分析技术是机器视觉的核心,所以构造出一个良好的、适应相关领域应用的识别算法显得尤为重要。由于机器视觉控制系统主要用于工业现场,工作环境较为恶劣、现场噪声大,而且现在的应用领域越来越要求检测设备具有准确、高速地识别出目标的能力,如果不能构造出一个适应相应需求的识别算法,就不能适应不断增长的需求。特别是在运动物体跟踪时,由于摄像头随对象一起运动,自然目标的运动形式往往具有未知、 复杂、 高度非线性等特点,且周围环境的视觉特征随时间改变,此时仅依靠颜色或形状为目标跟踪特征的视觉跟踪控制方法缺乏鲁棒性。
3.计算数据量大
随着对机器视觉功能需求的不断提高,机器视觉所获取的数据量也日益增大。比如用于人脸识别的机器视觉,识别一次要投射多达几万个红外线点;又如交通检测,一天累积下来的数据量也十分惊人。不过随着硬件技术的发展,这个问题将来会逐渐得到解决。
4.机器视觉系统自身的智能化水平不高
机器视觉是实现人工智能的关键,但目前为止,国际上机器视觉系统本身的智能化水平不高,导致机器视觉系统在外在条件发生变化时,要么需要人为干预,要么限定其使用范围,往往不能使机器视觉系统始终工作最优状态,导致成像质量下降。所以目前的机器视觉的最终效果往往依赖于图像处理与分析算法的先进性与复杂性,最终因为算法过于复杂性而不
能在实际系统中实时使用。
四、机器视觉的伺服控制技术发展趋势
随着计算机技术、电子技术等的发展,机器视觉的伺服控制技术主要发展方向有以下几点。
1.机器主动视觉的应用
机器主动视觉强调系统利用及其视觉伺服装置与周围环境进行交互,是当前机器人视觉领域的一个热点。由于机器视觉的成像质量随着光照条件、目标材料特性、几何形状特性、表面特性、相对位移等条件的变化而发生改变,为保障成像质量,系统可通过智能调节光照条件、机器视觉系统与目标的相对位置与相对姿态、机器视觉系统自适应调焦或变倍等,最终实现复杂工作条件下的最优成像质量。
2.多传感器信息融合
不同传感器各有优劣,都有一定的适用范围,如将多种传感器综合使用,取长补短,实施多传感器的信息融合,可以得到对象的更加准确、可靠的结果。
3.复杂环境下的物体跟踪
复杂环境下的视觉特征随时间改变,摄像头随对象进行未知、 复杂、 高度非线性运动,可考虑采用自适应多动态模型算法可以被采用以接近目标的复杂运动特性。
4.算法复杂度与准确度平衡
对于图像特征信息的提取直接关系到伺服系统性能的优劣,机器视觉系统自身智能化的高水平实现,可以降低对图像处理算法复杂度的苛刻要求,提高机器视觉系统的实时性与使用效果。
参考文献
[1]王耀南, 陈铁健, 贺振东,等. 智能制造装备视觉检测控制方法综述[J]. 控制理论与应用, 2015(3):14.
[2]孔德磊, 方正. 基于事件的视觉传感器及其应用综述[J]. 信息与控制, 2021, 50(1):19.
[3]魏秀琨, 所达, 魏德华,等. 机器视觉在轨道交通系统状态检测中的应用综述[J]. 控制与决策, 2021.
[4] 吕铁,韩娜.智能制造:全球趋势与中国战略[J].人民论坛·学术前沿,2015(11)
[5] 沈义平, 徐贺. 移动机器人视觉跟踪控制方法综述[J]. 2012.
[6] 王耀南,陈铁健,贺振东.智能制造装备视觉检测控制方法综述[J].控制理论与应用,2015(03)
[7] 张思源,陆志强,崔维伟.考虑设备周期性维护的流水车间生产调度优化算法[J].计算机集成制造系统,2014(06)
基金項目:重庆市教委科学技术研究项目资助(KJQN201803204,KJQN202003202)