关于软件控制的轨道交通限界检测装置的设计与研究
2021-02-17吉忠科罗李陈怡鑫王帅赵波
吉忠科 罗李 陈怡鑫 王帅 赵波


摘要:本文研究的限界检测系统是上位机软件控制的基于断面检测法的车载接触式检测系统。采用了一台基于激光测距的测量光机来测量侵限时侵限点的侵限数据;通过基于二维坐标法的标定系统实现由激光器中心坐标系到轨道基准坐标系的转换;根据线路限界图制作检测模板;通过设置一摄像机对各检测模板实时摄像,实现检测过程的可回溯;利用上位机软件提取侵限视频、将检测结果生成报表;通过安装激光里程计实现列车的里程定位。本文论述了软件控制的铁路限界检测系统的整体方案及其实现方法,介绍了双通道实时侵限录像算法、检测装置外轮廓控制过程等。
关键词:限界检测;断面检测法;可回溯
中图分类号:U216.3文献标识码:A文章编号:2096-6903(2021)10-0048-06
0引言
随着我国轨道交通愈加快速的发展,传统的检测系统已满足不了铁路限界检测高效、准确的需求,亟需一种高速化、信息化的限界检测系统支撑轨道交通的飞速发展,因此,本课题的研究具有重要意义。
铁路从开始投入使用至今,限界检测技术也多种多样,从测量方式上,主要分为接触式和非接触时两种;从使用环境上,主要分为便携式和车载式,其中便携式主要用于个别断面的补充测量,而长距离断面检测,普遍使用车载式测量。
国外早期广泛使用的是接触式的测量方式,但其测量速度较低,在繁忙干线上对运输干扰十分严重,且不能用于电气化区段。
到如今,他们普遍使用的测量系统多采用基于光传播时间原理的旋转激光扫描测距传感器,将其直接加装到正常运营的车辆或专业检测车上,经振动补偿后,可获得线路全断面尺寸。结合车辆定位系统,记录断面的位置,通过分析线路断面尺寸及其发展趋势,实现对线路全断面的状态监测。
目前国内使用较为普遍的测量方式是断面模板法测量,根据计算出的设备限界尺寸制作检测模板和框架,将它们固定在平板牵引车上,在平板牵引车的牵引下对全线进行检测。现有检测系统具有设备简单、成本低廉的特点,但由于其自动化和智能化程度较低,也往往表现出检测精度低、效率低、检测速度较慢等问题。
作者简介:吉忠科(1977—),男,湖南靖州人,本科,高级工程师,从事铁路及城市轨道交通工程监理工作。
1方案概述
在现有车载式的铁路限界检测装置的移动框架的手摇调节机构上增加了一电机,配合编码器和主控制器,实现对移动框架的自动定量调节;在平板牵引车底部安装一个激光里程计用于车辆定位,解决了检测到侵限时不能准确记录侵限点位置信息的问题;设计并制作了一基于激光测距技术的测量光机,将该测量光机安装在限界检测装置的框架上,用于精确测量侵限点的侵限数据;在框架的正前方放置了一摄像组件,对检测过程实时记录,便于过程回溯和侵限部分的责任认定;设计了一上位机软件,对装置无线控制。
1.1整体结构设计
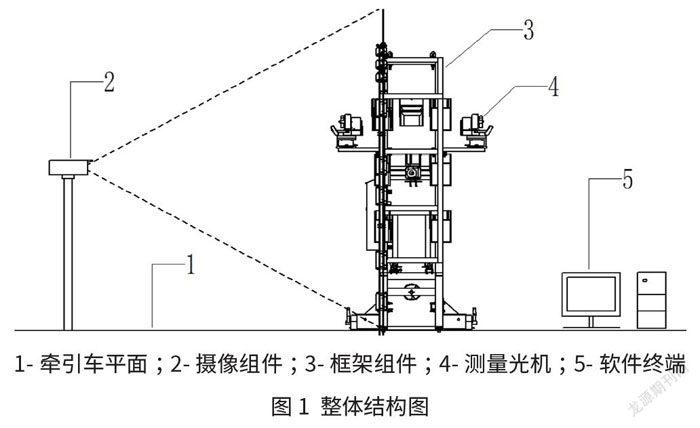
如图1所示,该装置由摄像组件、框架组件、测量光机及软件终端组成。
1.1.1摄像组件
摄像机组件主要由摄像头、摄像头防护罩、三脚支架、万向节、底板及路由器组成,摄像头安装在防护罩内,再将防护罩安装在三脚支架上,三脚支架通过万向节与底板连接,再用磁吸将底板吸附在牵引平板车表面,达到了将摄像头固定在平板车上的目的,不用改造牵引车,安装方便。摄像机通过路由器将拍摄内容发送到上位机软件。
1.1.2框架组件
框架组件(如图2所示)与现有同类装置相比,在移动框架调节机构中,在手动调节的基础上添加了一执行电机,同时在移动框架和固定框架之间安装了可实时获取精确移动框架位移量的位移传感器,配合主控制器,三者构成闭环控制系统,使移动框架的控制变为手、自一体;侵限检测方式为:当建筑或设备侵限时,触动检测模板绕铰链旋转,带动感应片远离接近开关,当感应片与接近开关距离达到某一值时,接近开关被触发,可通过调节接近开关与感应片的初始距离来调节侵限检测的灵敏度。
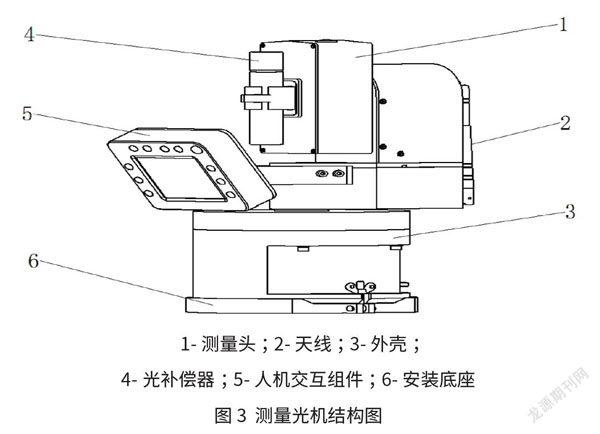
1.1.3测量光机
测量光机(如图3所示)可绕纵轴和横轴两个方向旋转,天线(2)用于测量光机与主控制器之间通信;光补偿器(4)在环境光线较弱時为测量头(1)提供光线补偿;可使用人机交互组件(5)手动对准测量点和测量;通过安装底座(6)将测量光机安装在固定框架上。
测量范围为以所述测量镜头旋转中心为圆心,最大测量距离为半径的球形空间。将所述测量光机安装在固定框架上一能使测量光机测量激光能覆盖平板车以上所有断面模板正面处,侵限时,可通过软件控制或手动控制的方式旋转测量光机使测量激光对准侵限点,便可测量出侵限点的侵限值,其测量原理如下:
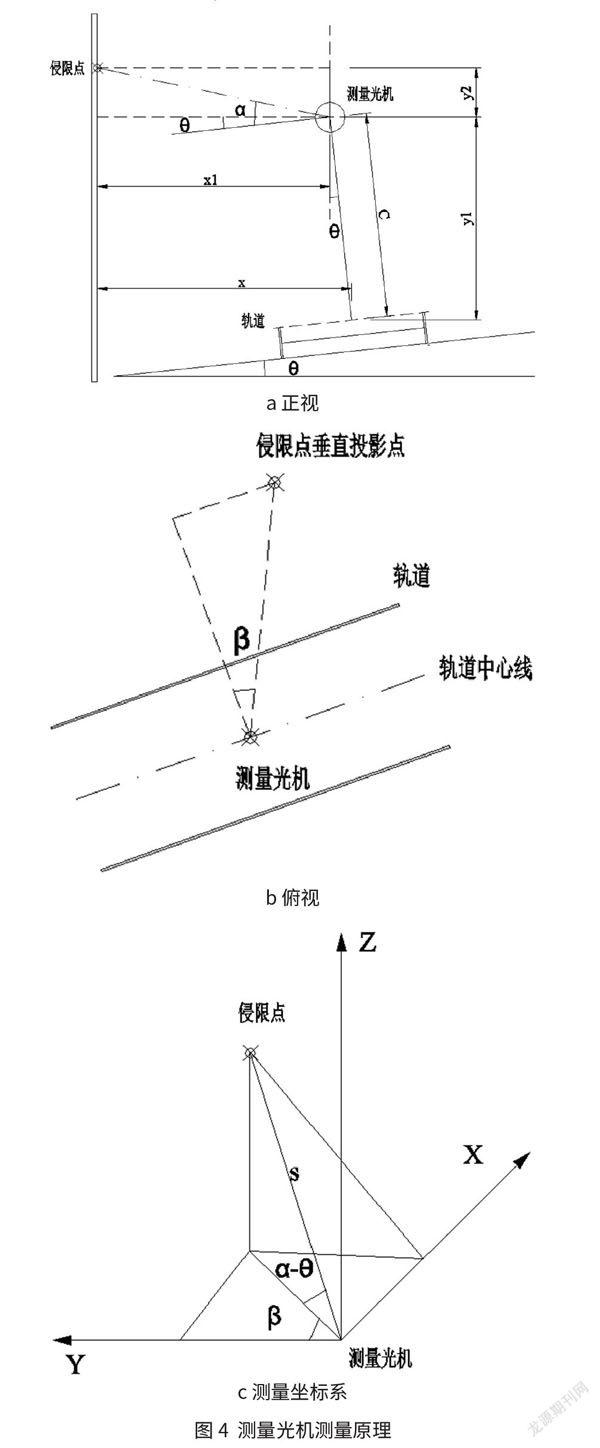
测量光机可以直接测量得到侵限点到测量光机的直线距离S,测量光机内安装有角度传感器,用于获取测量激光镜头旋转的角度,由角度传感器可以得到α、β的值,C的值也可以直接测量得到,θ可通过查看轨道施工资料或直接测量得到,由图4可得到:
x=s*cos(α-θ)cosβ
y=c*cosθ
y=s*sin(α-θ)
x=x+c*sinθ=s*cos(α-θ)cosβ+c*sinθ
y=y+y=c*cosθ+s*sin(α-θ)
其中,y表示轨道线路中心线与轨道上表面的交点到测量光机的垂直距离,x代表轨道中心线与轨道上表面的交点到测量光机的水平距离,s为侵限点与测量光机的连线到正视平面的投影长度。
在直线段时,α为零。
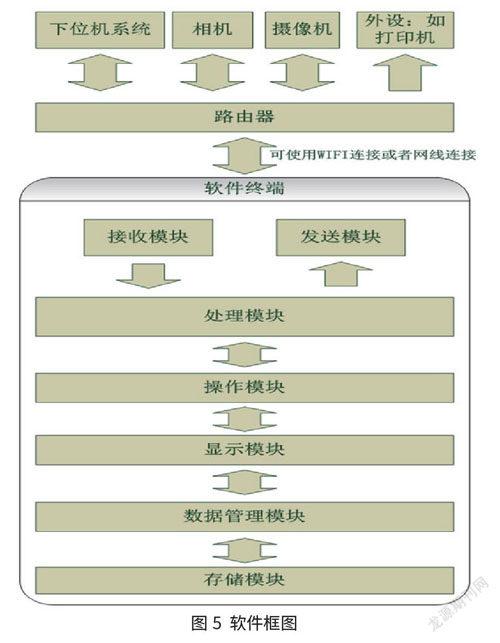
1.2上位机软件设计
限界检测装置的软件部分,主要分为七个模块,分别是:接收模块、处理模块、操作模块、显示模块、数据管理模块、存储模块以及发送模块。
曲线地段限界则根据平面几何的偏移量以及过超高导致的限界加宽、加高量、曲线轨道参数及车辆参数变化引起的限界加宽量计算,而直线段和曲线段之间的切换,则可直接通过软件进行操作。
软件框图如图5。
(1)接收模块。作为数据接收接口,在实时检测中,下位机系统收集的当前断面模板的伸缩量、水平角度以及激光所测距离值,侵限发生时,所触发的碰撞检测组件的序号,这些数据会通过路由器传递到软件,并通过接收模块转换成程式所能理解的内容传递至下个模块。
(2)发送模块。相对于接收接口,作为数据发送接口,主要是将软件经过一系列处理得到或者从已有数据库中提取得到的断面模板伸缩量及测量光机的旋转角度数值传递给外部输出端。
(3)操作模块。测量前,用户根据实际情况,选择对应的断面模板数据,对伸缩组件进行控制,进而达到调整断面模板的目的。
侵限发生时,按照软件操作提示,旋转测量光机,使其对准侵限物后,进行精确测量。
(4)显示模块。主要是用于显示直接接收到的信息,如来自摄像机的对测量作业全过程的录像视频画面以及侵限时测量光机中的显示画面。
在测量过程中,软件系统还会实时绘制并显示实时画面。
如果超限便会显示如某侵限检测模板动作画面并实时报警。
(5)数据管理模块。数据管理分为两部分。
第一部分是对断面模板的管理,用来存储不同路段限界数据和断面模板伸缩量。主要功能分别为增、删、查、改:
增,用户自身可以根据实际的情况添加自定义的断面模板;
删,在增加的基础上,用户也可以自己删除指定的自定义模板,用于清除冗余模板,便于管理;
查,根据模板的创建时间、编号、区段来查询断面模板的信息数据;
改,当模板数据错误或需要更新数据时,用户可以自行修改指定的自定义模板的指定内容。
第二部分是对侵限数据的管理,这部分主要是用于事后对数据的回溯。回溯数据又分为侵限数据、全景视频、侵限图像。
侵限视频的查询可以根据对应的时间、区段、侵限值直接完成,查询的结果则可以生产Excel报表然后导出到Windows里,用户可在Excel中自行打印或下载到U盘。
全景视频以及侵限图像同样可以依据时间、区段查询,查询结果同样可以生产Excel报表,也同样可以打印和下载。
(6)存储模块。存储数据到数据库内,以及从数据库内调用、查找和修改数据。
(7)处理模块。正常检测时,软件系统将会对全景视频进行测量时间的字幕合成。
当存在侵限时,软件系统会自动标红断面显示区域,并控制蜂鸣器持续蜂鸣,直到用户手动取消报警。同时,全景视频合成字幕会自动添加侵限标识、公里标区间,还会生成单独的侵限图像,同时对侵限图像进行测量时间、侵限位置、公里标区间的字幕合成。
发生侵限后,将测量光机测量激光点对准侵限点,软件系统会结合具体算法计算出侵限物距离线路中心与搭轨面交点的垂直和水平距离,然后根据直接外部硬件设备采集和内部算法得出的侵限数据,生成具体的Excel报表,表中包含的内容有侵限照片、侵限视频、侵限线路、侵限公里标区域、侵限值等,用户可以根据实际情况,选择在测量作业中或测量作业后生成。
在遇到直曲段转换的时候,软件具备相应的切换功能,但需要用户先停车,然后在软件中执行切换操作,之后软件根据直线段计算曲线段水平超高,并且自动控制断面模板修改伸缩量。
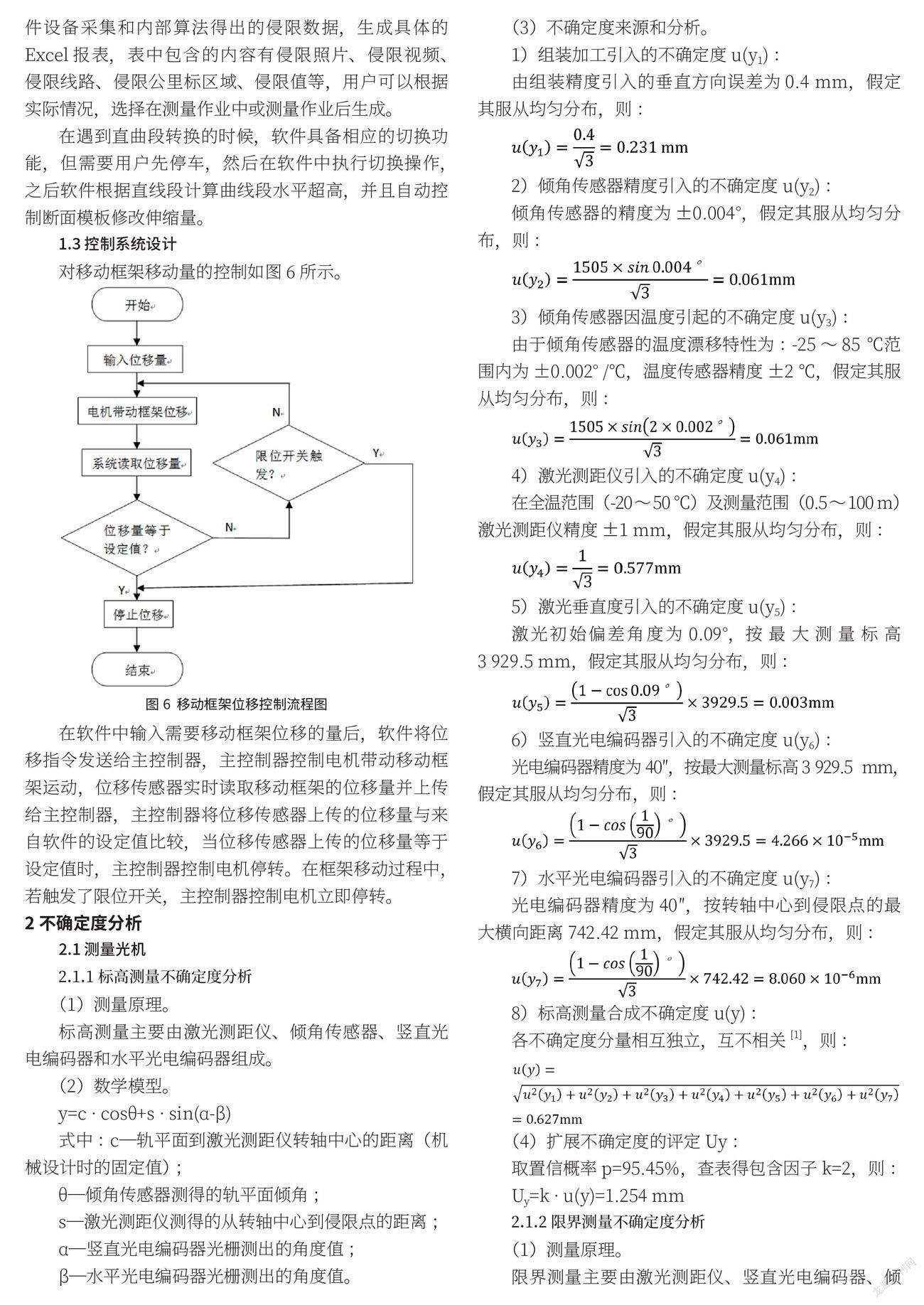
1.3控制系统设计
对移动框架移动量的控制如图6所示。
在软件中输入需要移动框架位移的量后,软件将位移指令发送给主控制器,主控制器控制电机带动移动框架运动,位移传感器实时读取移动框架的位移量并上传给主控制器,主控制器将位移传感器上传的位移量与来自软件的设定值比较,当位移传感器上传的位移量等于设定值时,主控制器控制电机停转。在框架移动过程中,若触发了限位开关,主控制器控制电机立即停转。
2不确定度分析
2.1測量光机
2.1.1标高测量不确定度分析
(1)测量原理。
标高测量主要由激光测距仪、倾角传感器、竖直光电编码器和水平光电编码器组成。
(2)数学模型。
y=c·cosθ+s·sin(α-β)
式中:c—轨平面到激光测距仪转轴中心的距离(机械设计时的固定值);
θ—倾角传感器测得的轨平面倾角;
s—激光测距仪测得的从转轴中心到侵限点的距离;
α—竖直光电编码器光栅测出的角度值;
β—水平光电编码器光栅测出的角度值。
(3)不确定度来源和分析。
1)组装加工引入的不确定度u(y):
由组装精度引入的垂直方向误差为0.4 mm,假定其服从均匀分布,则:
2)倾角传感器精度引入的不确定度u(y):
倾角传感器的精度为±0.004°,假定其服从均匀分布,则:
3)倾角传感器因温度引起的不确定度u(y):
由于倾角传感器的温度漂移特性为:-25~85 ℃范围内为±0.002°/℃,温度传感器精度±2 ℃,假定其服从均匀分布,则:
4)激光测距仪引入的不确定度u(y):
在全温范围(-20~50 ℃)及测量范围(0.5~100 m)激光测距仪精度±1 mm,假定其服从均匀分布,则:
5)激光垂直度引入的不确定度u(y):
激光初始偏差角度为0.09°,按最大测量标高3 929.5 mm,假定其服从均匀分布,则:
6)竖直光电编码器引入的不确定度u(y):
光电编码器精度为40″,按最大测量标高3 929.5 mm,假定其服从均匀分布,则:
7)水平光电编码器引入的不确定度u(y):
光电编码器精度为40″,按转轴中心到侵限点的最大横向距离742.42 mm,假定其服从均匀分布,则:
8)标高测量合成不确定度u(y):
各不确定度分量相互独立,互不相关[1],则:
(4)扩展不确定度的评定U:
取置信概率p=95.45%,查表得包含因子k=2,则:
U=k·u(y)=1.254 mm
2.1.2限界测量不确定度分析
(1)测量原理。
限界测量主要由激光测距仪、竖直光电编码器、倾角传感器和水平光电编码器组成。
(2)数学模型。
x=s·cos·(α-θ)cosβ+csinθ
式中:
s—激光测距仪测得的从转轴中心到侵限点的距离;
α—竖直光电编码器光栅测出的角度值;
θ—倾角传感器测得的轨平面倾角;
β—水平光电编码器光栅测出的角度值;
c—轨平面到激光测距仪转轴中心的距离(机械设计时的固定值)。
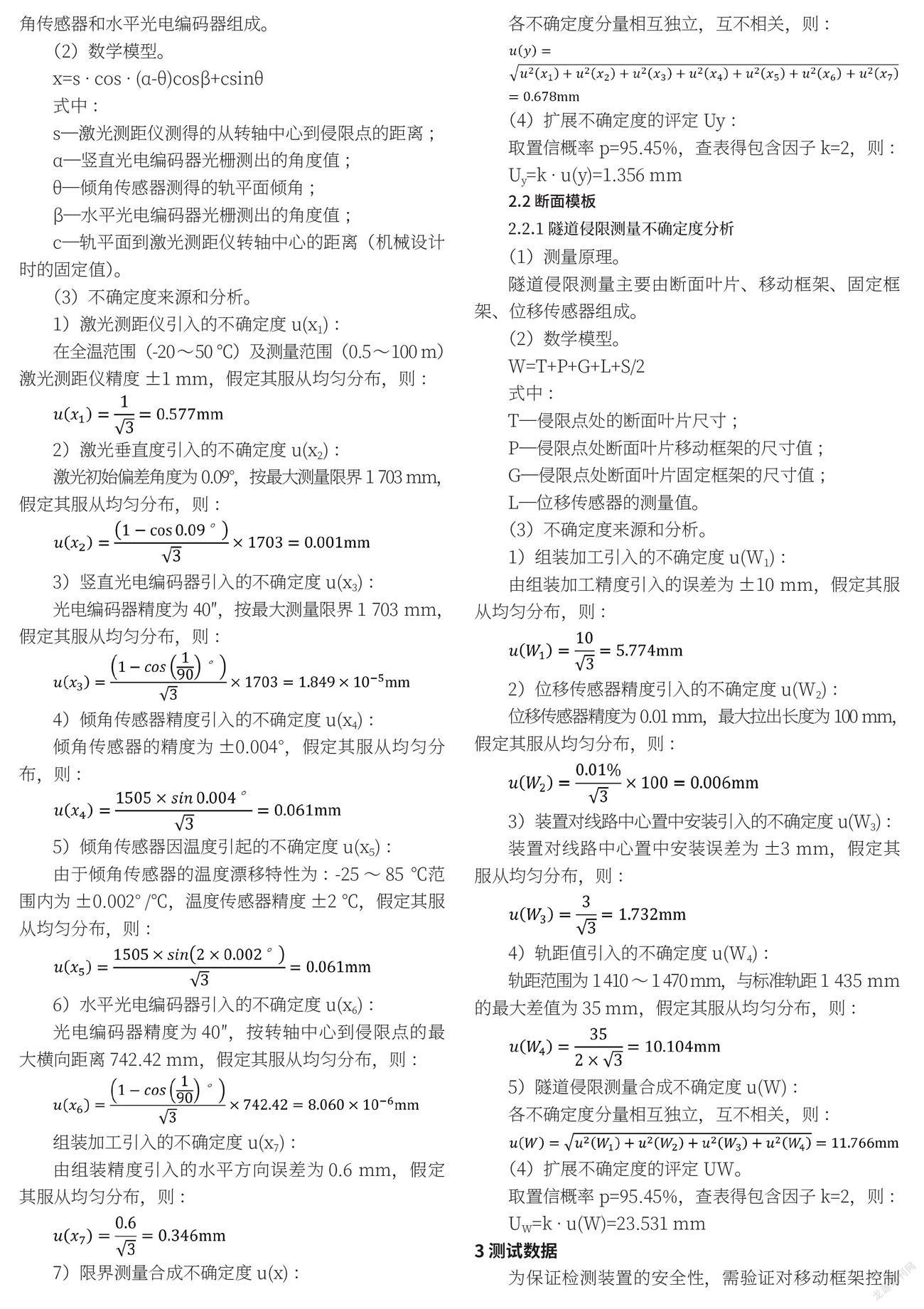
(3)不确定度来源和分析。
1)激光测距仪引入的不确定度u(x):
在全温范围(-20~50℃)及测量范围(0.5~100 m)激光测距仪精度±1 mm,假定其服从均匀分布,则:
2)激光垂直度引入的不确定度u(x):
激光初始偏差角度为0.09°,按最大测量限界1 703 mm,假定其服从均匀分布,则:
3)竖直光电编码器引入的不确定度u(x):
光电编码器精度为40庙,按最大测量限界1 703 mm,假定其服从均匀分布,则:
4)倾角传感器精度引入的不确定度u(x):
倾角传感器的精度为±0.004°,假定其服从均匀分布,则:
5)倾角传感器因温度引起的不确定度u(x):
由于倾角传感器的温度漂移特性为:-25~85℃范围内为±0.002°/℃,温度传感器精度±2℃,假定其服从均匀分布,则:
6)水平光电编码器引入的不确定度u(x):
光电编码器精度为40″,按转轴中心到侵限点的最大横向距离742.42 mm,假定其服从均匀分布,则:
组装加工引入的不确定度U(x):
由组装精度引入的水平方向误差为0.6 mm,假定其服从均匀分布,则:
7)限界测量合成不确定度u(x):
各不确定度分量相互独立,互不相关,则:
(4)扩展不确定度的评定Uy:
取置信概率p=95.45%,查表得包含因子k=2,则:
U=k·u(y)=1.356 mm
2.2断面模板
2.2.1隧道侵限测量不确定度分析
(1)测量原理。
隧道侵限测量主要由断面叶片、移动框架、固定框架、位移传感器组成。
(2)数学模型。
W=T+P+G+L+S/2
式中:
T—侵限点处的断面叶片尺寸;
P—侵限点处断面叶片移动框架的尺寸值;
G—侵限点处断面叶片固定框架的尺寸值;
L—位移传感器的测量值。
(3)不确定度来源和分析。
1)组装加工引入的不确定度u(W):
由组装加工精度引入的误差为±10 mm,假定其服从均匀分布,则:
2)位移传感器精度引入的不确定度u(W):
位移传感器精度为0.01 mm,最大拉出长度为100 mm,假定其服从均匀分布,则:
3)装置对线路中心置中安装引入的不确定度u(W):
装置对线路中心置中安装误差为±3 mm,假定其服从均匀分布,则:
4)轨距值引入的不确定度u(W):
轨距范围为1 410~1 470 mm,与标准轨距1 435 mm的最大差值为35 mm,假定其服从均匀分布,则:
5)隧道侵限测量合成不确定度u(W):
各不确定度分量相互独立,互不相关,则:
(4)擴展不确定度的评定UW。
取置信概率p=95.45%,查表得包含因子k=2,则:
U=k·u(W)=23.531 mm
3测试数据
为保证检测装置的安全性,需验证对移动框架控制的稳定性。
对移动框架控制的稳定性测试:
两框架同步运动,步骤如下:将两移动框架与固定框架贴合并标记为零点,再手动将两移动框架都调整到与固定框架横向距离100 mm处,软件中同步运动框输入两框架的位移量(与零点的距离)依次为200 mm、300 mm、280 mm、400 mm、320 mm,每次输入后都测量其实际位移量,再将实际位移量与输入位移量比较,如表1所示。
從表1可以看出,控制两移动框架同步运动时实际值与输入值相差较小,不大于0.4 mm。
4结论
本文主要介绍了一种在现有接触式检测装置基础上略加改进的软件控制的铁路限界检测系统的设计思想和实现方法,并且研究了解了国内外铁路限界检测目前使用最广泛的方式,在其基础上提出了利用软件控制的接触式铁路限界检测系统,且完成了系统的设计与制作,并对系统进行了全面测试,证明了系统的稳定性和实用性。
该系统虽然已经能够满足铁路竣工验收和日常维护时的使用需求,但尚还有需后续改进之处,如:体积较大,不太便于运输;系统理论满足应用要求,但实际使用过程中,激光里程计的定位误差较大;检测结束后生成的侵限信息报表中尚还无法包含各路段建筑、设备安装施工单位,对侵限处整改责任认定不够方便。
参考文献
[1]《铁路计量技术与管理》编写组.铁路计量技术与管理[M].北京:中国铁道出版社,2010.
Design and Research on Software Controlled Rail Transit Boundary Detection Device
JI Zhongke1,LUO Li2,CHEN Yixin3,WANG Shuai4,ZHAO Bo5
(I.China Railway Safety Engineering Consulting Co.,Ltd.,Tianjin 300171;
2.China Railway Construction Electrification Bureau Fifth Engineering Co.,Ltd.,Chengdu Sichuan 610091;
3.Nanjing Forestry University,Nanjing Jiangsu 210037;
4.University of Science and Technology Beijing,Beijing 100083;
5.Sichuan Jingwu Rail Transit Technology Co.,Ltd.,Chengdu Sichuan 610097)
Abstract:The limit detection system studied in this paper is a vehicle-mounted contact detection system based on the section detection method controlled by the upper computer software. A laser ranging-based measuring optical machine is used to measure the intrusion limit data of the intrusion limit point during the intrusion limit;the calibration system based on the two-dimensional coordinate method is used to realize the conversion from the laser center coordinate system to the orbit reference coordinate system;according to the line limit Make the detection template by drawing;set up a camera to take real-time video of each detection template to realize the traceability of the detection process;use the upper computer software to extract the limit video and generate the detection result report;realize the mileage positioning of the train by installing the laser odometer. This paper discusses the overall scheme of the software-controlled railway boundary detection system and its implementation method,introduces the dual-channel real-time intrusion limit video recording algorithm,and the control process of the outer contour of the detection device.
Keywords:limit detection;section inspection method;traceable