地铁FAO信号系统关键场景分析与测试设计
2021-02-11李迎春刘锦峰
李迎春,李 叶,刘锦峰
信号系统是全自动无人驾驶系统的列车控制系统,在全自动无人驾驶系统运行中起着关键作用。随着越来越多的城市轨道交通地铁线路投入使用,传统有人驾驶信号系统的室内测试方案已趋于完备成熟[1-3],而全自动无人驾驶信号系统因为项目实施经验少[4-5],在测试方法、测试场景和方案方面存在不足,这在一定程度上制约了全自动无人驾驶信号系统的安全、高效实施和应用。
本文结合上海轨道交通18号、15号线的室内集成测试,对全自动无人驾驶信号系统的关键场景提出一套相对完整的室内仿真测试方案,可供类似项目参考。
1 仿真测试方案设计原则
1.1 编制依据
上海市各线路无人驾驶信号系统测试方案必须完全满足合同,以及上海市交通运输行业规范《城市轨道交通全自动运行运营场景规范》(T/SHJX0018—2020)规定的技术和功能场景要求。
1.2 仿真测试平台
室内仿真测试平台需具备以下条件:①可将全自动无人驾驶信号系统的各个子系统有机联动起来,进行系统集成确认测试和仿真;②所有系统状态均可控,可以注入故障配合测试;③为确保室内测试环境和现场运营环境的一致性,信号系统的关键设备必须使用真实的设备;④平台中被仿真的设备必须和实际设备接口功能一致。
1.3 测试用例设计
根据现有试验室的设备和测试平台情况,梳理出适合在室内仿真测试的无人驾驶功能点,对每个无人驾驶功能点及相应接口进行测试用例分析,测试用例不仅包括正常场景测试,还应包括故障场景测试。
2 仿真测试平台配置
仿真测试平台采用半实物半仿真配置,车载控制器(CC)、区域控制器(ZC)、线路控制器(LC)、联锁(CBI)、列车自动控制(ATS)、数据传输系统(DCS)和维护支持系统(MSS)均使用真实设备,驾驶台、轨旁设备和车辆模型采用仿真软件,且仿真软件和相应实际设备的接口功能完全一样,尽可能地还原地铁现场运营环境。仿真测试平台结构见图1[6],可将所有信号子系统有机联动起来进行全面测试。
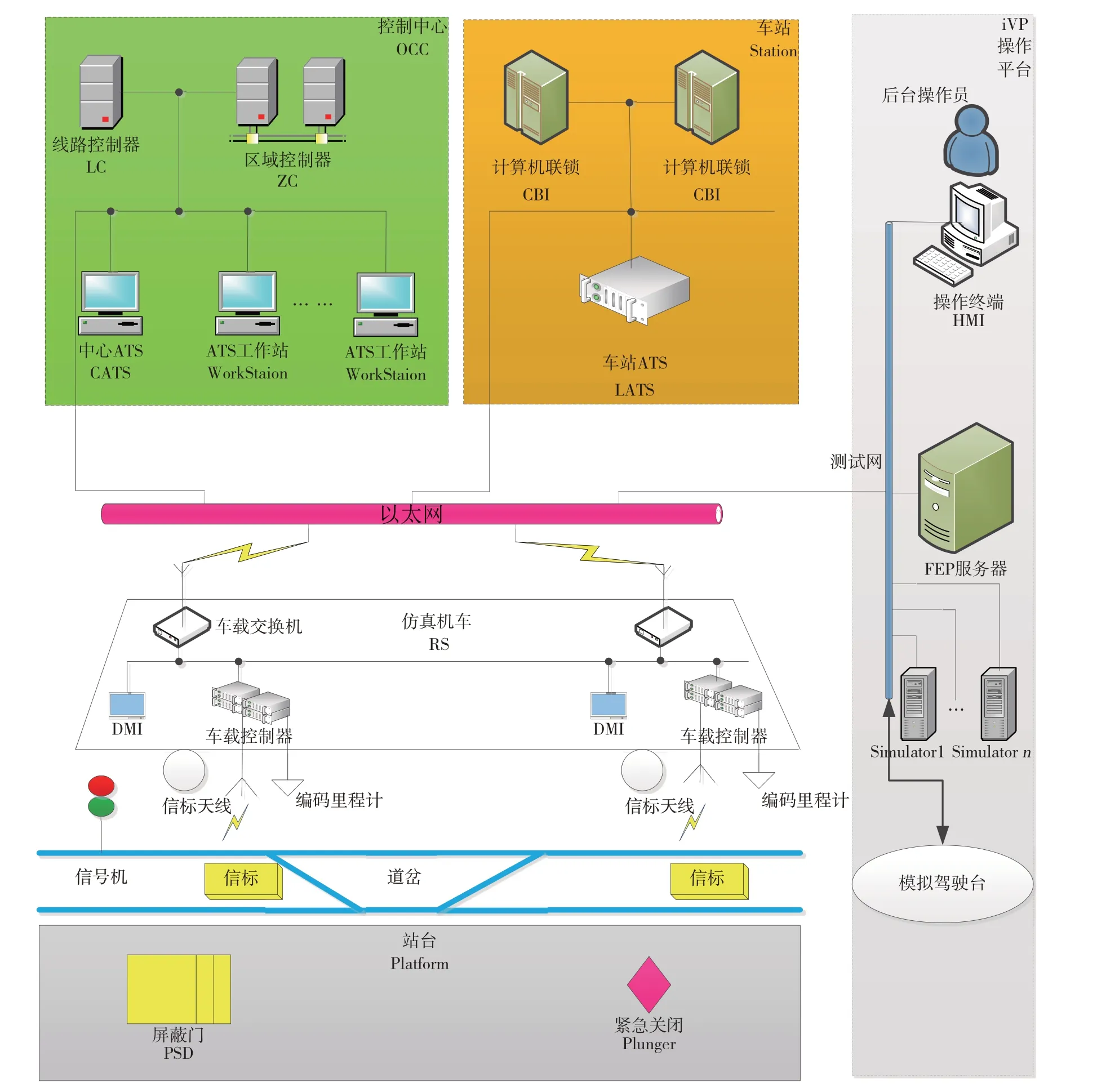
图1 全自动无人驾驶信号系统仿真测试平台结构
3 关键场景分析与测试设计
全自动无人驾驶的关键场景包括全自动无人驾驶模式转换、自动休眠、自动洗车、车门/屏蔽门对位隔离、自动清客等,主要运用场景分析法,分别从正常场景和故障场景测试进行分析和研究。
3.1 全自动无人驾驶模式转换测试
全自动无人驾驶模式(FAM)是在CBTC通信控制下由ATP监控的列车全自动运行模式。FAM模式与其他模式转换见图2。
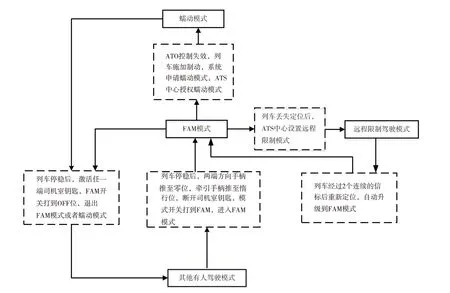
图2 FAM驾驶模式转换
1)FAM模式与其他有人驾驶模式转换。列车处于停止状态,车辆和信号车载设备通信正常,CC车载司机室两端未激活,将牵引手柄推至惰行位,选定FAM模式开关,列车驾驶模式切换到FAM模式,在ATS中心请求并获得FAM模式移动授权后,列车以FAM模式在线路上自动运行。如果FAM模式运行的列车遇到特殊情况需要降级进入有人驾驶ATP模式或者ATO模式时,列车可以停稳后,激活相应端的司机室钥匙,FAM模式开关打到OFF位,此时车载CC退出FAM模式,再进行相应模式的转换操作,即可进入ATP模式或者ATO模式。
2)FAM模式与蠕动模式转换。列车以FAM模式运行过程中出现车辆与信号车载设备通信故障、车辆网络故障等,会导致ATO控制失效,ATP系统将立即施加紧急制动,系统申请进入蠕动模式,经ATS中心人工授权后,信号系统驾驶模式由FAM模式转换为蠕动模式。ATP监控列车以不超过15 km/h(可设置)的速度全自动行驶,列车到站后自动扣车并打开车门,等待多职能巡检队员[7]登车处理:可以直接切换到有人驾驶模式驶离站台;也可以原地重启CC,若列车满足FAM模式条件,直接以FAM模式驶离站台,否则切换到有人驾驶模式驶离站台。
导体棒在磁场中做功,我们也可以把它分解为无数个自由电子在做功,而每个自由电子可拆分为垂直于导体棒的分力f2做功和平行于导体棒的分力f1做功。看图二我们可知f1与速度v2方向相同,f1做正功,则功率P1=f1v2=fcosαvsinα=fvcosαsinα
3)FAM模式与远程限制驾驶模式转换。远程限制驾驶模式是信号系统车载CC丢失定位时的应急模式。当区间出现连续2个信标故障或者车载控制器完全故障需要重启,车载CC丢失定位,ATS中心人工设置远程限制驾驶模式后,列车可以以低于固定速度(如不超过15 km/h)运行。列车在运行过程中接收到2个连续信标后,重新获得定位,自动升级到FAM模式。
根据以上FAM模式相关运营转换场景,测试设计见表1。

表1 FAM驾驶模式转换测试设计
3.2 自动休眠测试
FAO系统中列车自动休眠有2种方式:ATS远程自动休眠和ATS远程人工自动休眠[8]。首先列车以FAM模式在休眠点停稳,ATS自动发送休眠指令或者调试人员通过ATS远程发送休眠指令,CC收到指令后,通过列车信息管理系统TIMS(Train Information Management System)网络向车辆输出预休眠请求,当车辆响应该命令并反馈预休眠完成后,CC通过继电器输出休眠信号,具体休眠过程接口信息交互见图3。
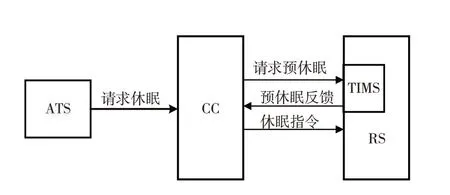
图3 休眠过程接口信息交互
根据以上列车自动休眠运营场景以及接口信息交互,测试设计见表2。
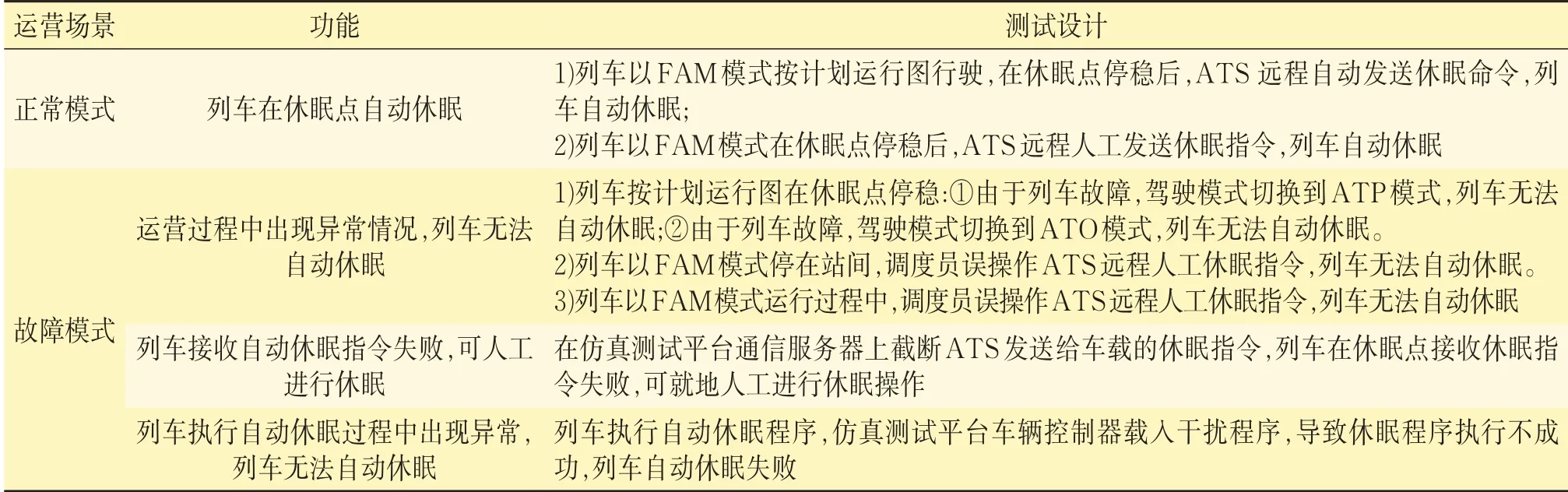
表2 列车自动休眠测试设计
3.3 自动洗车测试
自动洗车功能一般采用自动折返洗车的模式,实现列车以全自动无人驾驶的方式自动开到洗车库洗车,分为两种方式[9]:一是根据洗车计划安排列车进行自动洗车作业;二是由车辆基地值班员远程或者现地人工设置“洗车”工况。
自动洗车流程:列车根据洗车计划或者人工设置目的码以FAM模式运行到洗车库前,车载CC将“洗车”工况发送给车辆系统,列车通过预湿预冷运行到洗车库后方,自动换端,行驶至洗车停车点,信号系统向洗车机发送洗车指令[10],如图4所示,洗车机检测列车停在对应位置后,开始洗车;列车前端清洗干净后,车载CC控制列车以低速(3 km/h,可设置)运行,进行侧面清洗,到下一个洗车停车点进行列车尾端的清洗。洗车结束后,洗车机自动或者人工关闭,列车工况从洗车工况自动转换为场段运行工况,列车自动驶向停车列检库或调度人员人工设置的目的码。在洗车过程中,如果信号系统与洗车机接口故障或者人工按紧急停车按钮,联锁向ZC发送激活SPKS(Staff Protection Key Switch,人员防护开关)和ESA(Emergency Stop Area,紧急停车区域)的码位,此时SPKS和ESA激活,列车施加紧急制动。
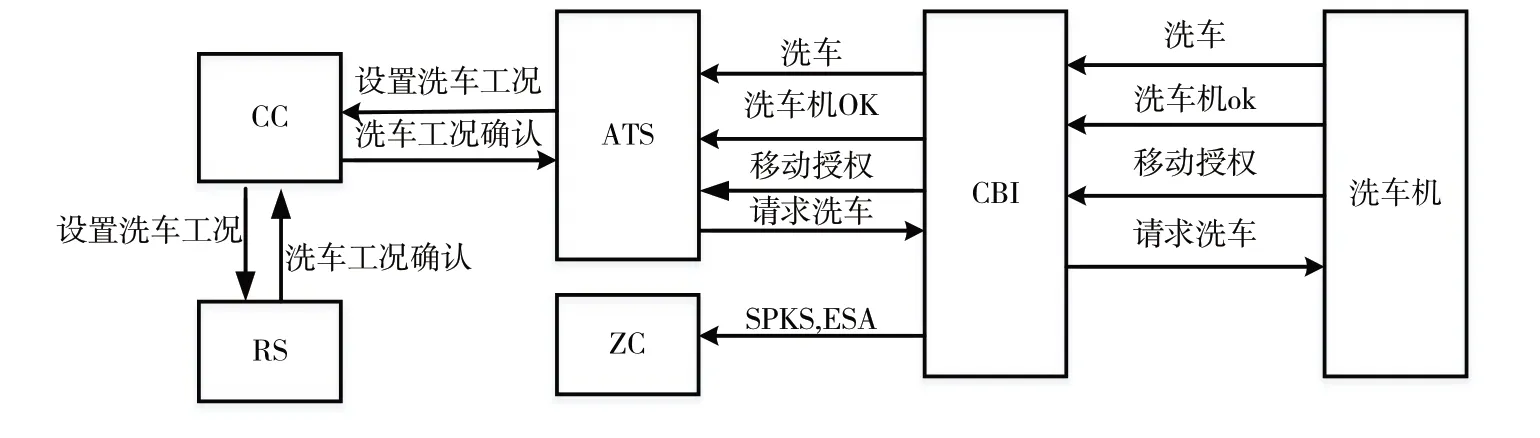
图4 自动洗车接口信息交互
根据以上列车自动洗车运营场景以及接口信息交互,测试设计见表3。
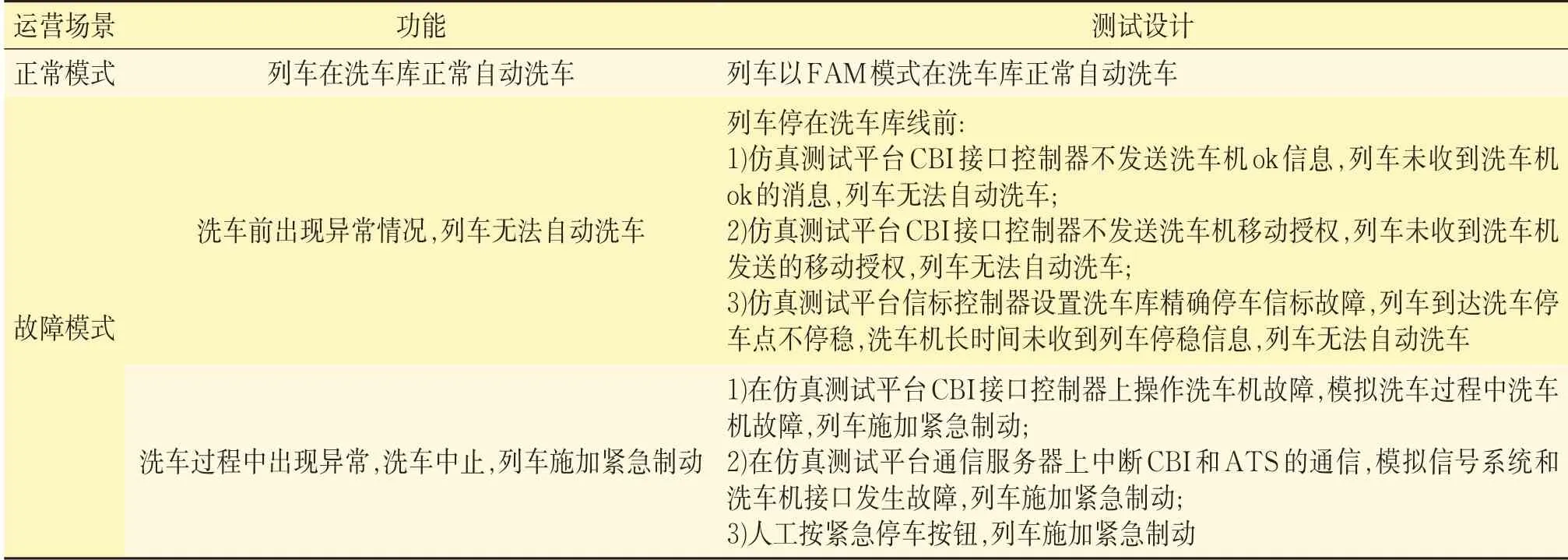
表3 列车自动洗车测试设计
3.4 车门/屏蔽门对位隔离测试
列车以FAM模式运行过程中出现车门或者屏蔽门故障时,列车主要依靠对位隔离功能实现车门和屏蔽门对位故障隔离,锁闭故障车门和屏蔽门,有效引导乘客从正常车门上下列车,保障列车的安全运营,从而提高列车运行效率[9]。车门/屏蔽门对位隔离接口信息交互见图5。
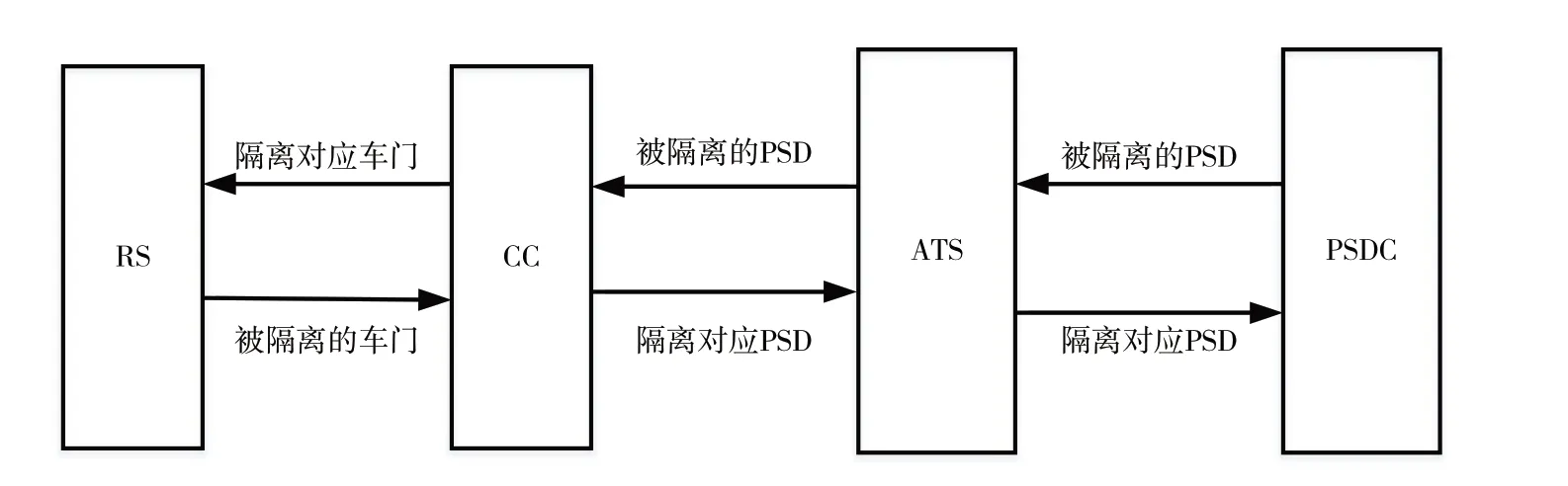
图5 车门/屏蔽门对位隔离接口信息交互
车门故障需隔离对应的屏蔽门时,车辆RS向车载CC发送被隔离的车门信息,车载CC经过处理后将需要隔离的PSD(Platform Screen Door)信息通过ATS子系统发送给PSDC(Platform Screen Door Controller),PSDC接到命令后隔离对应的屏蔽门。同理屏蔽门故障需隔离车门时,PSDC将被隔离的PSD信息通过ATS子系统传送给车载CC,CC经过处理后向车辆RS发送隔离对应车门的命令,RS收到命令后隔离对应的车门。
可通过2种方式查看对位隔离功能测试结果:抓包和观察ATS中心界面。使用wireshark抓包查看被隔离的屏蔽门和车门码位;在ATS中心界面上观察被测车门和屏蔽门是否保持对位隔离状态。
3.5 自动清客测试
从列车运营服务角度,清客可以分为常规清客和非常规清客。常规清客是指列车按照运营计划运行到折返站台或者终端站台,执行扣车清客作业,由多职能巡检队员确认乘客全部下车后,按压清客确认按钮,车门和屏蔽门自动联动关闭,自动进行折返作业或者下线回库。非常规清客是指列车在运行途中,由于线路发生突发事件导致列车必须紧急清客,这时需要ATS中心调度人员远程设置临时清客站台,清客完毕后,由多职能巡检队员确认乘客全部下车后,按压清客确认按钮,并派遣多职能巡检队员处置清客列车。
根据以上清客运营场景的描述,测试设计见表4。
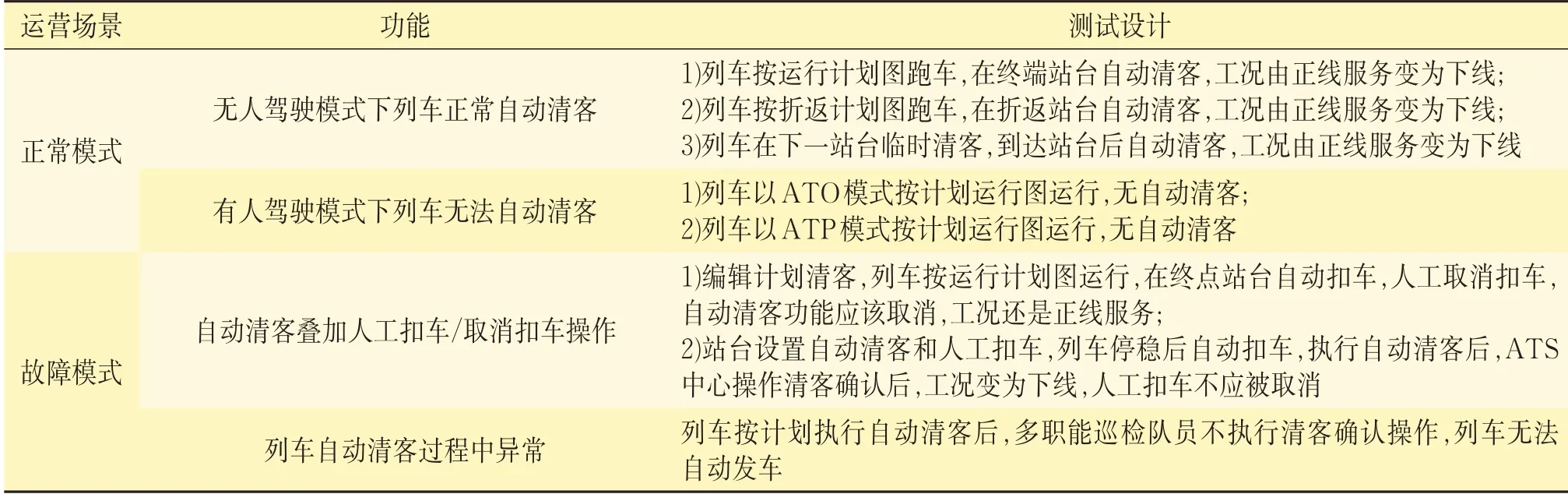
表4 列车自动清客测试设计
4 总结
本文基于仿真测试平台,对全自动无人驾驶信号系统进行了关键场景分析与仿真测试设计,为保证全自动无人驾驶线路安全稳定运行提供保障。该室内仿真测试方案已成功应用于上海轨道交通全自动无人驾驶18号、15号线。由于测试平台和室内设备的限制,室内仿真测试有其局限性,无法覆盖所有的无人驾驶运营场景,例如站台自动对位,信号系统与综合监控、广播系统的联动测试等仍需要在现场真实环境下进行验证。如何提高无人驾驶功能的室内仿真测试覆盖率,还需进一步研究。
