一个简单的三角形符号到底意味着什么?
2021-02-09HarryHolt,MikeSkroch
Harry Holt,Mike Skroch
1 符号是否有助于我们思考设计?
符号很重要,但如果一个符号可以表示多种东西呢?
正如我们将看到的那样,这可能会造成问题。在模拟世界中,三角形可以表示运算放大器、比较器或仪表放大器。您可以使用其中之一实现另一个的功能,但系统性能将不是最佳的。本文将讨论其区别以及需要注意的地方,以便我们设计的时候能绕开麻烦。我们将看到,在某些情况下,您根本不想尝试使用错误类型的器件进行设计。
查看图1,哪个三角形表示运算放大器?哪个三角形表示比较器?哪个三角形表示仪表放大器?答案:
它们都是!

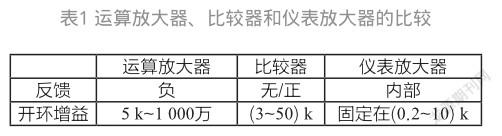
那么,它们有何区别,我们为什么要关注?从表1可知,某些特性有很大差别,但它们对电路和系统意味着什么?

我们来看看大家是如何陷入困境的……
2 反馈
运算放大器具有巨大的增益。学校老师教导我们,开始分析时,两个输入之差等于零。但在现实生活中,这是不可能的。如果开环增益为100万,那么要在输出上获得5 V,輸入上须有5 μV。为使电路可用,我们需要施加反馈,当输出要变得过高时,控制信号会反馈到输入,抵消原始激励——例如负反馈。当用作比较器时,如果没有反馈,输出将直接冲到一个轨或另一个轨。如果是正反馈,输出将在同一方向上被驱动到更远。因此,运算放大器需要负反馈。实际上,当某些运算放大器用作无反馈的比较器时,电源电流可能比数据手册上的最大值高5~10倍[1]。
但是,对于比较器来说,正反馈才是我们需要的。在没有反馈的情况下,如果比较器的一个输入缓慢超过另一输入的电平,输出将开始缓慢变化。如果系统中存在噪声,例如接地反弹,输出可能会反转,这在控制系统中当然是不希望发生的。但随后它开始回头,产生振荡行为,有时称之为震颤(参见MT-083[2]中的图5)。Reza Moghimi的文章《通过迟滞根除比较器的不稳定性》充分介绍了添加正反馈(也称为迟滞)的好处[3]。
对于仪表放大器,反馈已在内部,添加反馈只会产生不精确的增益。图2显示了一种利用运算放大器构建仪表放大器的典型方法。
注意:每个运放都有反馈。我们从使用标准负反馈图(见图3)开始,仪表放大器为G,期望增益为10,这意味着反馈系数为0.1。接下来,选择仪表放大器固定增益为100。使用式1,实际的闭环增益将为9.09,几乎有10%的误差。因此,将仪表放大器用作运算放大器并为其添加反馈是没有意义的。


运算放大器需要负反馈;比较器需要正反馈;仪表放大器不需要任何反馈。
3 开环和闭环增益
对于运算放大器,参见式1,开环增益(AVOL)越高,闭环增益将越精确。大多数运算放大器的开环增益在10万~1 000万之间,但某些较早的高速运算放大器可能低至3 000。如前所述,开环增益越高,闭环增益误差越小。
对于比较器,如果输出的逻辑摆幅为3 V,并且您需要1 mV阈值,则最小增益须为3 000。较高的增益将使不确定性窗口变小,但如果增益过高,微伏级的噪声就会触发比较器。
对于仪表放大器,开环增益的概念并不适用。
4 输入电容
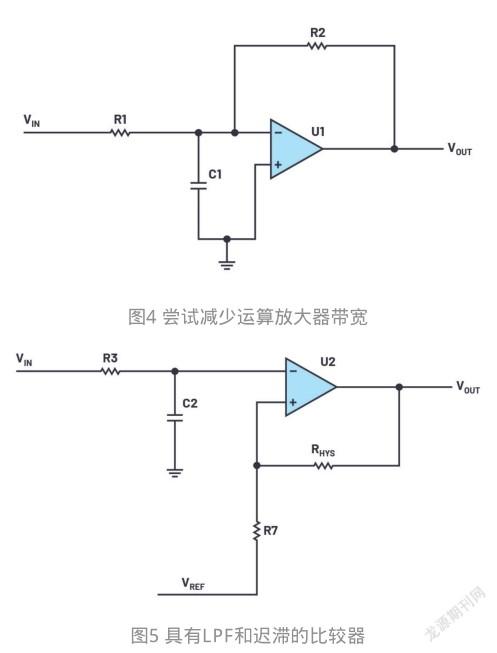
电路中常常会添加电容以限制带宽。查看图4,乍看之下,R1和C1似乎构成了一个低通滤波器。这行不通,可能导致振荡。反相放大器的反馈系数为R2/R1,但在图4中,反馈系数为R2/(R1//Xc)。随着频率提高,反馈系数也会提高,因此噪声增益以+20 dB/10倍频程的速率上升,而运算放大器开环增益以-20 dB/10倍频程的速率下降。它们在40 dB处交叉,根据控制系统理论,这肯定会产生振荡。限制电路带宽的正确方法是在R2两端放置电容。
比较器通常没有负反馈网络,因此图5中比较器前面的简单R和C构成的低通滤波器效果很好。RHYS应比R7大得多,两者分割输出摆幅以提供少量的正反馈(迟滞)。如果比较器有内置迟滞,例如LTC6752或ADCMP391,则不使用R7和RHYS。
对于仪表放大器,输入端放置电容是完全可以接受的,如图6中的C4所示。ADI公司仪器仪表指南[4]第5章中的图形显示了每次使用仪表放大器时都要做的一件好事情。如果用适当的走线和焊盘对印刷电路板进行布局,以允许添加两个电阻和三个电容,那么可以从0 Ω电阻和无电容开始,测量系统性能。通过调整5个元件的值,可以单独设置共模滚降和正常模式滚降(详情参见指南)。

5 输出
运算放大器或仪表放大器的输出会从接近一个轨摆动到另一个轨。根据输出级是使用共射极还是共源极配置,输出可能达到任一供电轨的(25~200) mV范围内。这被视为轨到轨输出。如果运算放大器由+15 V和-15 V供电,则不便于与数字电路接口。一种糟糕的解决方案是在输出端放置二极管箝位,以保护数字输入免受损坏。但取而代之的是,运算放大器因电流过高而损坏。运算放大器与数字逻辑接口有更复杂的方法,但何必那么麻烦?只需使用比较器即可。
比较器可以有CMOS图腾柱输出,或者有NPN或NMOS开集或开漏输出。虽然开集或开漏输出需要一个上拉电阻,导致上升和下降时间不等,但它有如下优点:比较器采用一个电压(如5 V)供电,并在其他电压(如3.3 V)下与逻辑接口。
6 重要规格
运算放大器需要一个高于最高信号频率的增益带宽,以使闭环误差保持较低水平。查看式1,我们知道增益带宽应为最高信号频率的10~100倍。如前所述,从式1中可以看出,AVOL是频率的函数,会影响闭环精度。相位裕量也很重要,它会随容性负载而变化,因此规格表应清楚说明测试条件。为了确保直流精度,失调电压应较低。对于经过调整的双极性运算放大器,(25~100) μV比较好;对于FET输入运算放大器,(200~500) μV比较好。自稳零/斩波/零漂移运算放大器几乎总是低于20 μV(最大值),这是就整个温度范围而言的。请查阅一些典型运算放大器的数据手册,如ADA4077、ADA4084、ADA4622或ADA4522。
传输延迟是比较器的关键规格。运算放大器在过驱时会变慢,比较器与之不同,当过驱时会变快。规格表有时会提供少量过驱(例如5 mV)下的传输延迟,以及50 mV甚至100 mV的較大过驱下的不同传输延迟。
仪表放大器最重要的指标是共模抑制比(CMRR),因为应用需要提取一个位于大共模电压之上的非常小的差模信号。像许多规格一样,此规格随频率而变化,有时还会列出直流CMRR或非常低频率下的CMRR。通常会提供CMRR与频率的关系图。例如,当检测H桥电机驱动器中的电流时,此图将非常重要,如图7所示。
这可能是仪表放大器最困难的应用,因为共模电压从一个轨附近变到接近另一个轨,并且电流迅速反向。增益带宽和压摆率都很重要。
7 编程
这里的编程并不意味着编写代码,它是指配置器件以满足系统要求(尽管某些仪表放大器确实有通过SPI端口和寄存器进行传统软件编程的功能)。
运算放大器需配置为负反馈。这可以是纯阻性元件,但通常将电阻与电容并联使用以限制带宽。这样有助于提高信噪比,因为噪声会在整个范围内积分,哪怕我们仅使用其中一部分;也可以只使用电容,获得一个积分器或微分器。
比较器应始终有一点正反馈,以确保一旦输入迫使输出移动,输出就会强化移动(参见图4和图5)。图片和计算参见MT-083。一些比较器具有内部迟滞,但如果需要,通常可以增加更多迟滞。一些具有内部迟滞的比较器有一个引脚用来添加一个电阻,以改变其迟滞量。
运算放大器可以用作比较器,但这并不理想,有一些事项要注意。您必须是一个很好的模拟设计人员才能很好地做到这一点。MT-083介绍了一些注意事项,讨论其利弊的相关文章有很多。如果您不惧危险,可以查阅参考资料。
比较器几乎总是用电阻进行编程。您可以添加一个高阻值电阻来提供一点正反馈,也可以使用一个电容来提供交流反馈,以避免增加直流迟滞。一些比较器具有内置迟滞,但这同样可以通过增加少量正反馈来提高。
8 最后注意事项
尝试将运算放大器用作比较器时,会有微妙的事情发生。有不少低噪声双极性运算放大器的输入之间有反并联二极管。大多数比较器的输入共模范围占总范围的80%或更多。但是,某些低噪声双极性运算放大器的输入之间有一个或两个串联二极管。这是为了防止输入级与发射极基极结之一形成齐纳效应,导致噪声性能随时间推移而降低。

在一个3.3 V系统中,如果将5 V运算放大器用作比较器,电源良好指示器的阈值电平为3 V,那么会出现一个输入为3 V而另一个输入为0 V的问题,因为这些二极管限制了运算放大器输入端允许的最大差分电压。
9 总结
对于许多应用,运算放大器的选择取决于用户是注重直流精度、交流精度、输入失调电压、增益带宽还是电源电压。到2020年,有超过700款器件可供选择。比较器的关键参数通常是传输延迟和电源电压。选择起来比较容易,共有122款器件可供选择。仪表放大器的主要标准是CMRR与频率的关系,但在DC附近,失调电压和增益精度也很重要。由于仪表放大器是专用的器件,因此“只有”63款可供选择。
只有选择正确的器件,才能实现未来若干年内无故障且可以大批量生产的产品和设计。
参考文献:
[1] HOLT H.运算放大器的“最大电源电流”规格[Z].ADI公司, 2011.
[2] MT-083教程:比较器[Z].ADI公司,2009.
[3] MOGHIMI R:通过迟滞根除比较器的不稳定性[J].模拟对话, 2000,34(7).
[4] 仪表放大器应用工程师指南[Z].3版.ADI公司,2006.
