高空清洁玻璃机器人的设计与实现
2021-02-07东南大学成贤学院电子与计算机工程学院戴诗璇李宝祖王子建
东南大学成贤学院电子与计算机工程学院 戴诗璇 李宝祖 王子建 韩 潇
在高层建筑中,玻璃内外会有许多的粉尘和其他污物,用我们设计的机器人来代替人进行高空作业。本文设计了一种基于Arduino单片机的智能清洁机器人系统,该项目拟设立一种高空清洁机器人使用电磁原理让机器人实现高空作业和清洁轨道化,同时利用交流电压技术产生清洁喷雾,超声波测距实现自动避让,并设置故障处理机制。
随着国家新型城镇化建设的进行,越来越多的高楼大厦拔地而起。发展不断进行的同时,高层的玻璃清洁也成了人们越来越关心的问题。现如今高层玻璃的清洁一直是由企业或者地产开发商用高价雇佣民工,或者一些城市外来劳工。因为劳工并没有先进的技术以及资金支持,所以用的安全措施十分简陋。人们的安全不能得到保证,所以我们团队设计并准备制作新一代高空玻璃清洁机器人。现在大部分的高空清洁机器人有很多种类,绝大部分是以吸盘固定,用单片机实现机器人的操控。我们设计的高空清洁机器人希望用电磁吸附的原理以及用超声波震荡原理产生喷雾实现清洁。在我国未来的发展中,我相信高空作业会越来越受到国家以及企业的重视。因此我们团队对我们的设计作品很有信心。
1 硬件结构设计
机器人主要由吸附装置、电机驱动模块、清洁模块、超声波测距模块、电源及单片机主控模块等构成,如图1所示。
在我们通过讨论和调查确定适合本次实验的最佳器件,选择了带有麦克纳姆轮的小车作为本次机器人的主体。每一个车轮上装载了有许多椭圆形状的机轮,而且这些机轮与车轮轴心成45°排列。 车轮旋转时,机轮与地面接触发生摩擦,地面会给车轮与转轴产生一个45°的摩擦力,如图2所示。这个摩擦力可分解为X方向上的分量与Y方向上的分量,然后通过调整每一个车轮的运动方向或状态,从而改变X和Y方向上的分量的力的大小和合力的方向,让车子做各种方式的移动。
在小车与玻璃的固定方面,我们选择利用磁铁之间的强大吸引力,通过改变磁铁的数量及距离来调节磁力的大小,以达到机器人在玻璃上固定的作用。
在机器人底部放置了清洁模块,该模块由清洁布及雾化器组成,在玻璃两面分别加装以达到清洁的作用。其中雾化器采用的高频交流电压使金属片震动产生喷雾,既不会使水量过大产生水渍,也不会因为水量过小而达不到工作需求,为使喷雾功能能够持续工作,主要采用电池供电,保证工作的连续性。清洁装置配备可拆装的清洁布,放在机器人底部。在玻璃的另一侧放置配有磁铁的清洁布,以达到两面清洁的作用。
超声波测距模块通过发送和接收超声波,利用时间差和声音传播速度,计算出模块到前方障碍物的距离。以达到避障的目的。
我们用的电池是9V的锂电池,给单片机、雾化器、电机驱动供电。

图 1 麦克纳姆轮工作原理图
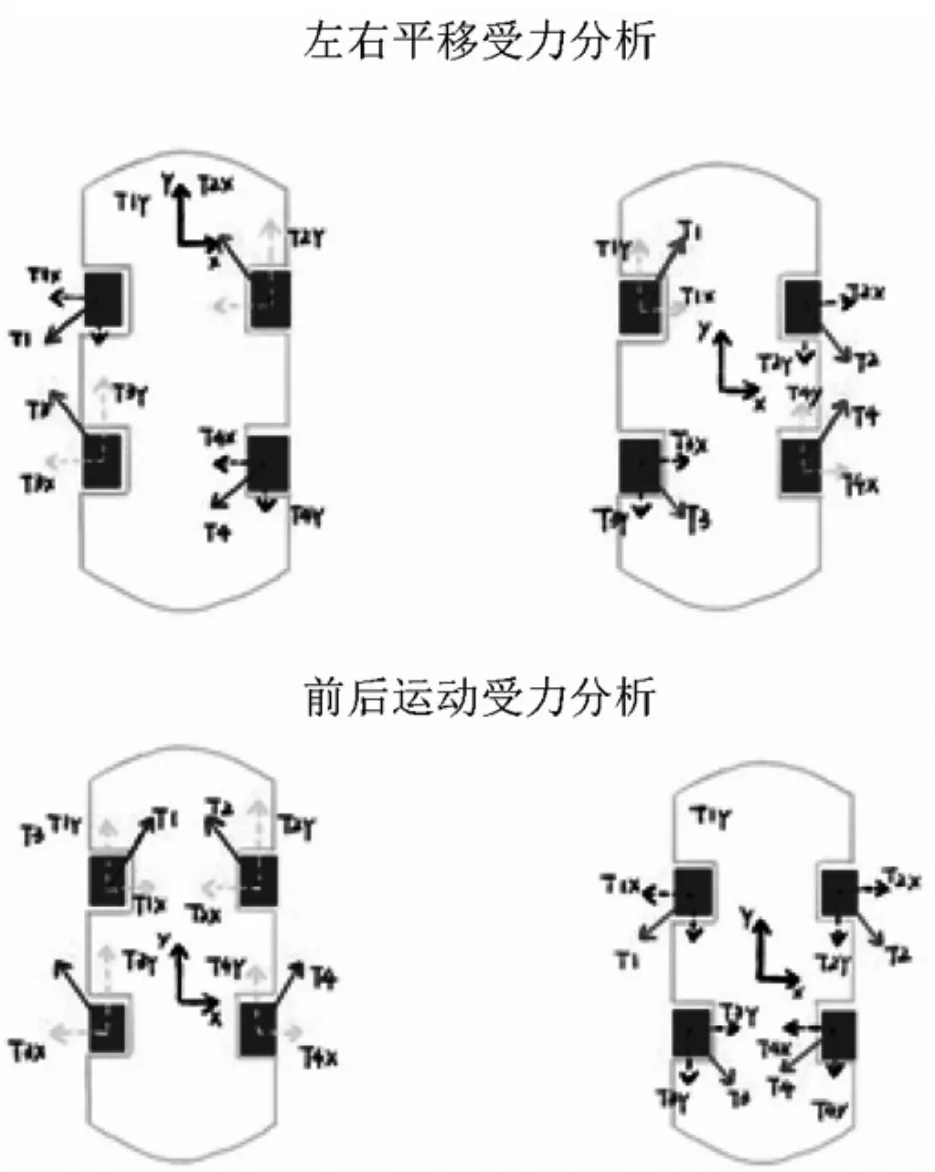
图 2 机器人外观设计

图3 程序流程图
2 软件设计
本设计选用Arduino单片机作为主控器。该机器人的程序主要围绕着车身到玻璃头尾的距离而设计的,如图3程序流程图所示。软件部分主要有端口配置、定时器、PWM输出,系统上电后,初始化各个模块,然后进入工作模式。
考虑到机器人与人不同,难免会存在一些地方不能达到理想清洁的情况,我们设计了以机器人清洁为主,手动清理为辅的工作模式。在自动模式下,机器人从玻璃左下方开始行走,通过单片机定时检测机器人运动状态,检测是否到达工作边界。若机器人达到,则使用单片机控制机器人向右方行驶一个车身的距离后向正下方行驶;继续检测后面玻璃边沿,然后控制机器人向右方行驶一个车身的距离后向正上方行驶。如此循环往复,走出一条“PWM波”形路径。
结语:本文介绍了基于Arduino单片机设计的高空清洁机器人。本项目创新在于取代人工高空清理玻璃作业,减少了人工操作的危险性。在玻璃两侧实现夹护式系统,通过磁铁产生的磁力相互吸引,保证了两侧的对应性,提升了整体的安全性能。整体添加了自动化的工作方式,可以按照设置的路径进行移动。清洗模块中采用的高频交流电压使金属片震动产生喷雾,既不会使水量过大产生水渍,也不会因为水量过小而达不到工作需求,为使喷雾功能能够持续工作,主要采用电池供电,保证工作的连续性。