基于旋转不变技术信号参数估计的激光扫频干涉测量方法*
2021-02-06徐靖翔孔明许新科
徐靖翔 孔明 许新科
(中国计量大学计量测试工程学院,杭州 310018)
激光扫频干涉测量技术具有无测距盲区、非接触、单次测量多目标的能力.通过傅里叶变换可提取目标拍频频率,进而解算距离.然而受激光器调频带宽限制,通过傅里叶变换得到的目标分辨率受限于固有分辨率.为解决该问题,本文提出采用基于旋转不变技术的信号参数估计(ESPRIT)算法对测量信号进行频谱分析.实验通过插值拟合法校正测量信号拍频非线性,进而采用ESPRIT 算法测量目标距离,结果表明在傅里叶变换算法无法区分临近目标频率的情况下,采用ESPRIT 算法可以区分出目标的频率,通过计算可得被测目标的厚度为2.08 mm.从而为诸如光纤临近损伤点、薄台阶高度或小孔等测量提供了思路.
1 引 言
激光测距具有测距范围大、抗干扰能力强、分辨率高等诸多优点,被广泛应用于光学探测、三维形貌测量和工业制造等领域.常用的激光测距方法有光频梳法、干涉法、相位法和脉冲法等.激光扫频干涉测量技术属于光学干涉测量技术的一种,该技术将调频测距的原理和激光的优点相结合,可以实现多目标、非接触、高精度的绝对测距,在工业制造和科学研究中具有重要的价值[1−5].
激光扫频干涉测量技术作为一种新型相干探测技术,采用线性调频信号调制激光,对被测目标的拍频信号进行频谱分析可以获得被测目标的距离与速度[6−8].该技术的测量分辨率与可调激光器的调频带宽有关,当激光器的调频带宽达到几十至上百GHz 时,测量分辨率可达到毫米级.为了提高激光测距系统的测量分辨率,可以通过增大激光器的调频带宽.2001 年,Schneider[9]利用干涉仪在反馈环路中补偿激光器的非线性,并采用对称扫频的方法消除环境带来的振动干扰,在调频带宽为15 GHz 时的测距精度为毫米级.2010 年,Arseny等[10]利用算法将三个可调激光器的光谱相结合,使扫描范围提高至原来的三倍,从而使测量分辨率提高了三倍.2011 年,于啸等[11]对调频连续波雷达技术的测距测速分辨率进行测试和分析,实验结果表明该系统的测距精度达到厘米级,测速精度可达到毫米级.2015 年,孟祥松等[12]提出了基于重采样技术的高速测量方法,对多次不同测量的等光频间隔采样的信号进行拼接,实现了对激光器调制带宽的拓展,从而提高了测量分辨率.
激光扫频干涉测量技术一般利用快速傅里叶变换(FFT)进行频谱分析,分辨率与采样频率和采样点数有关,提高测量分辨率需要增加采样点数.由于受激光器调频带宽限制,采样点数无法任意增加.为在算法上进一步提高测量分辨率,目前常用的算法如现代谱估计中的线性预测自回归(AR)模型法,该算法需要经过多次递推计算才能确定模型阶数的最优值,增加了计算负担,而且随着阶数的增加,会导致伪峰的增多.FFT 算法存在栅栏效应和频谱泄漏,将导致信息的丢失和频谱的扩大或者混叠,造成频谱分辨率下降.多重信号分类(MUSIC)算法需要进行谱峰搜索寻找峰值,这会带来很大的计算量,该算法通过改变阵元数可在一定程度上提高分辨率,但会使得运算时间大幅度增加[13−19].
本文对激光扫频干涉测量原理及拍频非线性校正方法进行了研究,在此基础上采用信号参数估计(ESPRIT)算法对目标进行测量,该算法与MUSIC 算法相比具有计算速度快的优点.与FFT算法进行对比,ESPRIT 算法能够克服栅栏效应,可以用于解决测量分辨率受调频带宽限制难以进一步提高的问题.
2 原 理
2.1 激光扫频干涉测距系统示意图
本文中的激光扫频干涉测距系统如图1 所示,分布式反馈(DFB)激光器与两个光路相连.一个是主光路,用于目标的测量,主要构成为迈克耳孙干涉仪.另一个是辅助光路,主要构成是马赫-曾德尔干涉仪,其输出的信号用于对被测目标的采样信号进行重采样,目的是校正DFB 激光器的调频非线性,两路延迟单模光纤的作用是改变两个光路的光程.首先,DFB 激光器99%的能量进入主光路,然后再次经过99∶1 的分束器,将99%的能量用于测量光,剩余的1%用于参考光路,两部分信号在耦合器中耦合后,探测器1 获得主光路最终的输出信号.同时,DFB 激光器剩余的1%的能量进入辅助光路后,被50∶50 分束器分为两路,并由探测器2接收输出的信号.探测器1 和探测器2 将接收到的光信号转换成电压信号,并将其传输到数据采集卡.
激光拍频干涉测距原理如图2 所示.DFB 发出的线性调频光,经过分光镜PBS 后被分为两束.一束作为本振光,到达系统内部的反射镜后,被反射进入探测器.一束作为测量光,达到目标后返回,在探测器中与本振光发生干涉产生拍频信号[20−24].
激光扫频干涉测量拍频形成的原理如图3 所示.假设DFB 激光器发出的线性调频光频率为

式中ω0为调 频起 始角 频率,f0为 调频 起始 频率,Ω=2πB为角调频带宽,k=B/Tm为调频斜率,Tm为调频周期,ωL(t) 为本振光频率,则主光路中的本振光信号可以表示为

其中AL为振幅.主光路中的测量光信号为

其中AT为测量光的振幅,c为光速,Rt为被测目标与激光测距系统相距的距离,nair是空气折射率,τt=Rtnair/c.本振光和测量光在探测器中形成的光电流,最终输出可以表示为

图1 激光扫频干涉测距系统示意图Fig.1.Schematic diagram of laser scanning interference ranging system.

图2 激光拍频干涉测距原理图(PA,检偏器)Fig.2.Schematic diagram of laser beat frequency interference ranging (PA,polarization analyzer).

图3 激光扫频干涉测量拍频形成原理图Fig.3.Schematic diagram of beat frequency formation in laser frequency scanning interferometry.

式中,Ia为平均光强,ξH为外差干涉效率.第一项和第二项是直流项,第三项和第四项分别为在探测器上形成的和频项与差频项.直流项不含被测目标的距离信息,通过带通滤波器可将其滤除.和频项其频率超过探测器的响应范围,该项可不考虑.差频项为本振光与测量光光频之差,当频差小于探测器的截止频率时,有光电流输出.可表示为

(5)式表明测量信号为余弦形式的信号.对其进行频谱变换可以得到被测目标的拍频频率
快速傅里叶变换的频谱分辨率为 ∆fb=1/Tm,代入(5)式可以得到激光扫频干涉绝对距离测量的分辨率为[25]

2.2 插值拟合法理论模型
为了校正DFB 激光器的调频非线性对测量的影响,本次实验采用插值拟合法对测量光信号进行非线性校正,该方法的理论模型如下.设辅助光路中由延迟单模光纤形成的光纤长度差为R1,折射率为n1,形成的时间延迟为τ1=R1n1/c,则辅助光路中的信号可以表示为

其中f(t) 是激光器的瞬时频率.将该信号对主光路中的信号做插值拟合法,时刻选择的是IL′每经过一个周期上升沿的过零点时刻,即IL′=0 时,可以得到

N是辅助光路信号过零点的个数,进而可以得到

主光路中延迟单模光纤形成的光纤长度差为R2,折射率同样为n1,在拍信号中形成的时间延迟为τ2=R2n1/c.由于主光路和辅助光路中的激光信号来自于同一个激光器,因此同一时刻下两光路中信号的瞬时频率相同,主光路的信号可以表示为

将(10)式代入(11)式得到:
式中的τ1,τ2为常数项,当Rt确定时,τt也是一个定值.(12)式表明经过插值拟合法对测量信号进行非线性校正以后,测量信号变成了以k为自变量的余弦信号,与激光器瞬时频率f(t) 无关,即采用插值拟合法可以校正测量信号的拍频非线性.
2.3 ESPRIT 算法原理
由上述分析可知,测量信号为余弦信号,为提高测量分辨率,本文提出采用现代谱估计中的ESPRIT 算法进行频谱分析.经典谱估计以傅里叶变换为基础,该方法是将数据工作区以外的未知数据假设为零,相当于数据加窗,这并不符合实际.与经典谱估计相比,现代谱估计是通过观测数据估计参数模型,再按照求参数模型输出功率的方法估计信号功率谱,进而提高了谱估计的分辨率.ESPRIT 算法的具体原理如下.
设测量信号x(n) 可以表示为一系列幅值按指数规律变化的余弦信号与白噪声的组合,当该信号入射到一个有M个阵元的平面阵列上,在采样时刻n,其输出数据的矩阵模型如下:

式中Ts为采样周期;ap,ϕp,ωp,σp是第p个衰减分量的幅值、初始相位、频率和衰减系数;w(n) 为噪声.
根据观测数据序列x(0) ,x(1) ,···,x(N −1)构造出一个Hankel 数据矩阵:


式中y为频率向量,Φ为旋转矩阵,

其中 jω1,jω2,··· ,jωp是(13)式中的频率.设U1,U2是两个交错的长度为M−1 的数据矩阵,视为长度为M的数据矩阵的子窗口,有

可得

为了在较少数据长度下,该算法仍有较高的分辨率,采用奇异值分解的方法,矩阵X进行奇异值分解:
令V1,V2分别是Vs删除最后一行和第一行后得到的新矩阵,存在旋转矩阵Ψ,使得

由(20)式和(22)式可知,矩阵Φ中的对角元素即是Ψ的特征值,考虑到噪声和干扰误差等因素,用E1,E2分别表示V1,V2的误差,(22)式可改为

运用最小二乘法求出Ψ的最优解使(23)式成立,同时使得误差矩阵E1和E2的总体误差最小,最终可以求得频率
3 实验及结果
为了验证ESPRIT 算法的有效性,搭建了如图1 所示的激光测距系统对目标进行测量,其中使用的DFB 激光器光源波长为1550 nm,调频带宽为60 GHz,测量目标为前表面镀膜的反射镜,根据(6)式,可以求得测距系统的分辨率为2.50 mm.对目标进行测量时,数据采集卡同时采集主光路的信号和辅助光路的信号,利用辅助光路中的信号对测量信号进行插值拟合,从而消除测量信号的拍频非线性.
对被测目标进行测量前,首先采用插值拟合法进行非线性的校正.对未经过插值拟合法进行非线性校正的被测信号做频谱分析,如图4 所示,可以看出测量信号由于DFB 激光器的非线性导致了频谱展宽,使得无法准确提取出目标频谱中心频率.
图5 是非线性校正前的测量信号的时频图,可以看出随着时间的增加,频率也随之改变,这一变化是由激光器的调频非线性造成的.
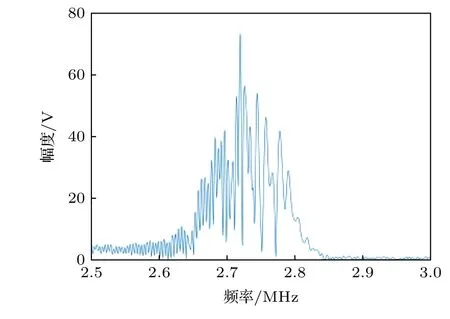
图4 未采用插值拟合时信号的频谱图Fig.4.Spectral diagram of the signal without interpolation fitting.
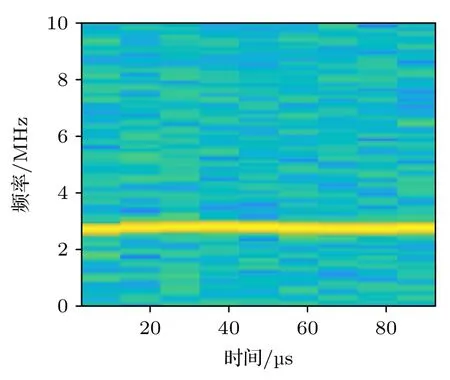
图5 未采用插值拟合信号的时频图Fig.5.Time-frequency diagram of the signal without interpolation fitting.
对测量信号做非线性校正,经过插值拟合法校正后得到的新信号如图6 所示,可以看到图中有一个明显的单一尖峰,保证了提取目标频率的稳定性.通过对比图4 和图6,可以看出采用插值拟合法后,大幅度减小了测量信号的频谱展宽,表明对测量信号进行插值拟合法的非线性校正方法是可行的.
校正非线性后的时频图如图7 所示,可以看出测量信号经过非线性校正后,频率随时间的增加保持稳定.
调整准直镜头,将一个前表面镀膜的反射镜紧密夹在三坐标机械臂上.机械臂移动不同的距离,每段移动的距离由三坐标测量机测量给出,同时使用激光测距系统在每段距离的起点和终点对反射镜进行测量,采用FFT,MUSIC 和ESPRIT 三种算法对应的测量结果如表1 所列.
由表1 可知,ESPRIT 算法与FFT 计算得到的结果与三坐标测量机给出的结果相比,最大误差是0.016 mm.

图6 采用插值拟合后信号的频谱图Fig.6.Spectral diagram of the signal with interpolation fitting.

图7 采用插值拟合后信号的时频图Fig.7.Time-frequency diagram of the signal with interpolation fitting.
对双目标进行测量时,调整镜头的角度至光斑照射在双目标的交界处,此时能同时获得两个测距值.对三组不同厚度的双目标进行测量,ESPRIT算法的测量结果与实际厚度的比较如表2 所列.
由表2 可知,ESPRIT 算法计算得到的结果与三坐标测量机测量的实际厚度相比,误差在20—40 µm 之间.

表1 不同距离下三种算法的测量结果与实际距离的比较Table 1.Comparison of the measurement results of three algorithms and the actual distance under different distances.

表2 ESPRIT 算法对不同厚度的双目标的测量结果与实际厚度的比较Table 2.Comparison of the measurement results of the ESPRIT algorithm with the actual thickness of dual targets.
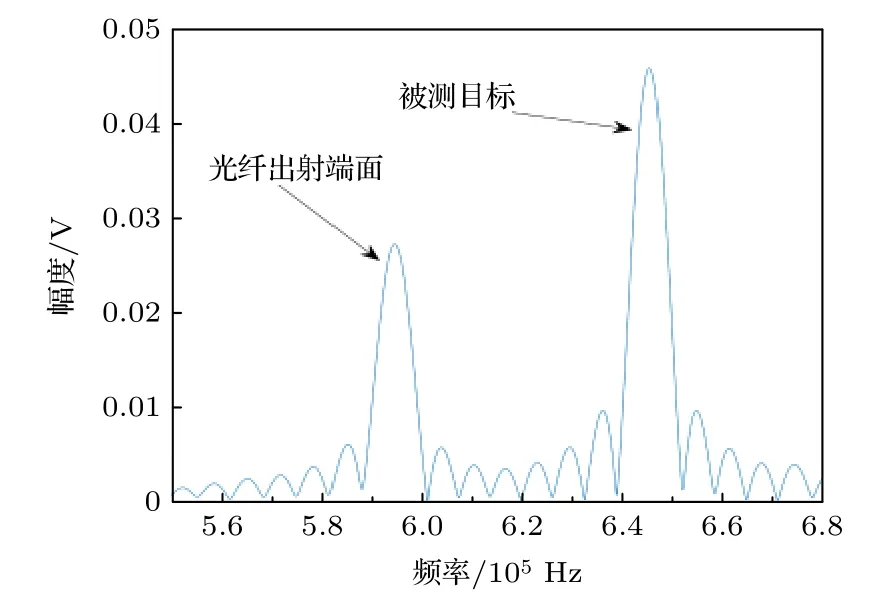
图8 被测目标的频谱图Fig.8.Spectral diagram of the measured target.
经过上述对比,本文采用ESPRIT 算法对被测目标进行频谱分析.被测目标由两个前表面镀膜的反射镜构成,将两反射镜紧密夹在三坐标测量机的机械臂上,对两反射镜交界处进行测量,然后对获得的信号进行频谱分析.由FFT 算法得到的测量结果如图8 所示,图中左侧的尖峰代表的是测量系统的光纤出射端面,右侧的单一尖峰是被测目标.由于被测目标由两个反射镜构成,理论上在经过频谱分析后会获得两个尖峰,但从图中可以看出只有一个尖峰,这是由于被测目标之间的距离小于测距系统的分辨率.
为了解决该问题,区分出被测目标的两个尖峰从而获得其中心频率,采用ESPRIT 算法对测量信号进行计算与分析,得到被测目标的中心频率,如图9 所示.由于只需要被测目标的频率信息,为了方便计算将幅值信息进行了归一化.
根据ESPRIT 算法得到的结果,通过计算可得到被测目标的厚度为2.08 mm.
实验时,环境温度、湿度和气压变化会导致空气折射率nair改变,将导致测距值的变化.实验室中能保持相对稳定的温度、湿度与气压,经过分析,折射率nair带来的相对测量不确定度接近 1×10−6.
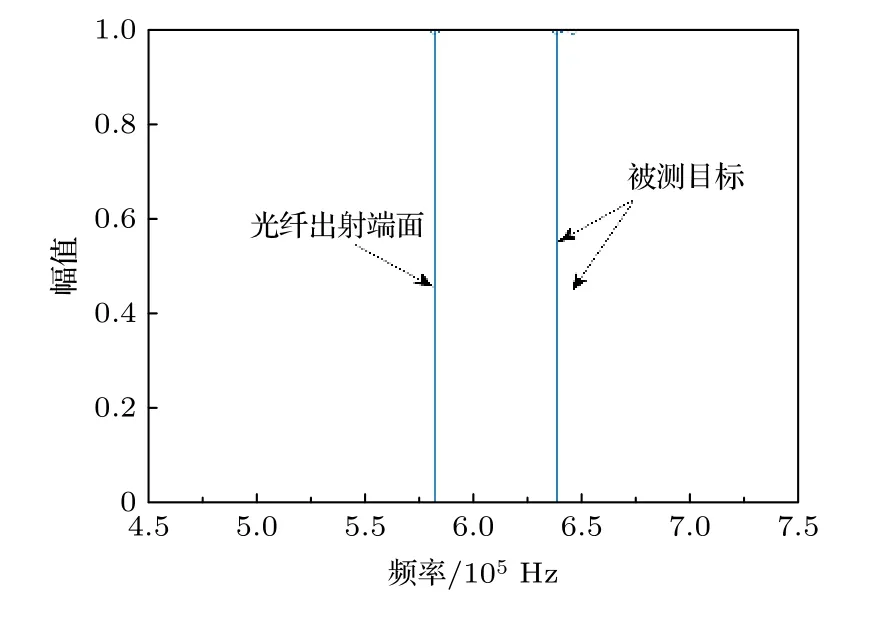
图9 采用ESPRIT 算法的结果图Fig.9.Result diagram using ESPRIT algorithm.
辅助光路中光纤的长度及折射率会受到环境温度的影响而变化,该误差将通过拍频非线性校正影响测距值.对该过程的分析如下,不同温度的光纤由其长度改变及线热膨胀引起的光程变化量为

其中R1(Ta) 是Ta温度下辅助光路中光纤的长度,Ta表示某一恒定温度,g(x) 为光纤折射率与温度相关的函数,Tz=5.5×10−7/℃为光纤的线热膨胀系数,Dn为光纤折射率的温度系数,T为当前温度.
R(Ta) 为Ta温度下被测目标相距的长度,当环境温度从Ta改变至T时,被测目标的时延τt与辅助光路的时延τ1的比值为

只保留一次项,将(24)式代入可得

对被测目标进行测量的误差为

(27)式表明光纤的长度和折射率受到温度变化的影响,温度每变化一度,光纤光程的变化量为0.009 mm/m.温度升高,被测目标测量的误差也随之增大,且与被测目标相距越远,误差越大.
4 结 论
本文采用ESPRIT 算法来提高激光测距系统的分辨率.首先研究了激光扫频干涉测量的原理,搭建了双干涉光路的激光测距系统.本次实验利用辅助光路的信号对主光路的测量信号进行插值拟合的方法,从而消除测量信号的拍频非线性.接着利用ESPRIT算法对测量信号进行处理,最终可以计算得到被测目标的厚度.结果表明ESPRIT算法可以进一步提高激光测距系统的分辨率.
