门克庆煤矿智能化开采系统设计研究
2021-02-06倪涛涛
倪涛涛,周 剑,曹 昆
(1.中国矿业大学矿业工程学院,江苏 徐州 221116;2.中国矿业大学深部煤炭资源开采教育部重点实验室,江苏 徐州 221116;3.中天合创能源有限责任公司 煤炭分公司,内蒙古 鄂尔多斯 017010)
近年来,国家能源局联合国家发展改革委积极推动煤矿智能化发展,提出创新煤炭高效和智能矿山等关键技术,从能源发展战略层面推动煤矿智能化发展。
目前,提高综采工作面系统的自动化水平已成为当前国内外采矿界研究的热点。国内外各企业都在加快步伐,将最前沿的工业控制技术应用于井下工作面及顺槽设备上,并对各设备进行集中控制。目前国内外多家煤矿企业都已对工作面自动化采煤进行尝试,并取得了一定的效果和成绩,但在使用过程中还存在一定的不足。为使中煤集团的自动化采煤技术得以快速发展,核心装备保持技术领先性,充分占据国内外市场份额,在总结集团内外智能化装备使用情况的基础上,本文以中天合创门克庆煤矿3103工作面作为工程背景,对井下自动化开采技术进行升级,现提出最先进的智能化异构集成开采技术。该技术将对目前主流的控制技术进行升级、优化,在现有的控制技术基础上,着重解决目前自动化开采过程中存在的各项技术难题,打造中煤集团自动化开采的样板工程,打造智能化采煤示范工作面。
1 智能化开采系统组成
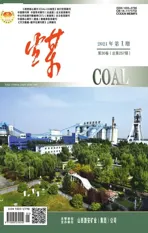
整个系统包括地面和地下两部分,其中地面主要包括监测和远程控制功能,井下是整个系统的核心区,主要包括各级设备的自动化系统及各系统之间的数据交互功能。各设备通过和智能控制平台进行实时通讯,由智能化开采平台收集、整合各设备的实时工矿参数及运行状态,来协调各设备之间的协同动作和远程监控。系统结构图如图1所示。
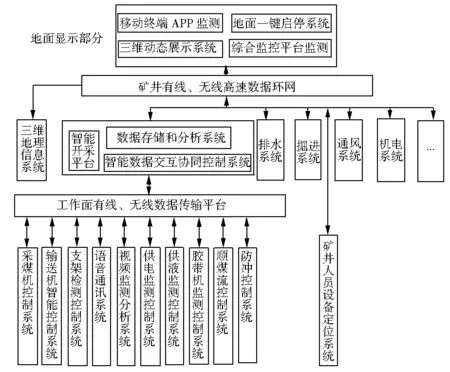
图1 系统结构图
2 智能化采煤工作面各系统的建设
2.1 液压支架智能控制系统改进设计
门克庆煤矿支架电液控制系统由德国DRD公司出产,(升柱/降柱、推溜/拉架、平衡收/伸、侧护板收/伸、一级护帮收/伸、二级护帮收/伸、伸缩梁收/伸、抬底/喷雾)虽然可实现简单的跟机拉架等功能,但不能满足目前的智能化需求,需要对其进行技术升级,来使智能化开采平台通过远程控制使支架完成相应的操作。
该套支架采用二级互帮结构,且在设计时未考虑对互帮状态和动作进行监测。智能化开采过程中需要对护帮伸出或缩回的状态进行监测,以了解护帮的动作,防止在采煤机行走过程中与护帮进行干涉,更好地实现设备间的协同作业和协同保护功能[1-2]。液压支架系统主要的研究内容包括:①远程数据传输功能;②姿态监测功能;③远程手动控制功能;④远程自动控制功能。
2.1.1 数据传输
各系统之间的数据交互是实现智能化开采功能的基础和保障,如何解决智能控制平台与支架电液控制系统之间的数据传输是解决支架电液控制系统智能化开采的关键技术之一[3-4]。但因为传输数据过多,易造成传输过程中数据中断和数据遗漏,所以需要充分考虑数据的核心内容和次要内容,在解决该问题时可采用两种通讯链路,以保证通讯的稳定性和可靠性。
本项目的智能控制平台与支架电液控制系统的顺槽控制台之间采用modbus/485和modbus/TCP两种方式进行数据传输。modbus/485方式,集中控制系统为主站,支架电液控制系统作为从站。modbus/TCP方式,集中控制系统作为Client,支架电液控制系统作为Sever。
2.1.2 姿态监测
液压支架姿态监测是对液压支架采高、护帮姿态、伸缩梁动作状态、顶梁状态、立柱压力和推移行程等进行监测[5-7],从而实现在开采过程中对整个支架的姿态进行监测,更好地调整支架的状态,配合其他设备实现智能化开采功能。液压支架传感器安装示意如图2所示。

图2 液压支架传感器安装示意
在理想状态下,为了全方位掌握支架的姿态,需要分别在1处安装角度传感器检测护帮角度,2处安装压力传感器检测护帮压力;3处安装压力传感器监测伸缩梁油缸压力,以判断伸缩梁动作;4处安装倾角传感器、采高传感器,监测顶梁水平状态支架高度;5处安装压力传感器,用于监测顶板压力;6处安装位移传感器,用于监测油缸位移。但从成本角度考虑,如果全部传感器都安装,会大量增加成本,给用户带来较大的压力,且以现有的检测技术和传感技术,部分传感器无法在井下复杂的环境中实现设计的功能。随着工况的改变,维护能力降低,将会造成大批的传感器损坏,从而需要对检测数据的真实性进行判断[8]。所以要根据现有的技术水平和传感器适应能力,通过最少的监测环节,借助其他的技术手段来对支架的姿态进行监测,实现实时掌握支架姿态的目的。
2.1.3 开采模式
液压支架控制系统同时具备手动开采和自动开采两种模式[9]。在与智能化平台进行数据交互的同时实现与采煤机协同智能化开采。
1) 手动开采。支架电液控制系统能够通过在智能控制平台处的键盘和监视器,通过视频系统和工况监测系统提供的实时数据,掌握支架的姿态,对任意一台支架进行远程的手动控制,实现对支架姿态的调整。调整的动作包括支架的升柱/降柱、推溜/拉架、平衡收/伸、侧护板收/伸、一级护帮收/伸、二级护帮收/伸、伸缩梁收/伸、抬底/喷雾,以及成组伸收互帮、伸收伸缩梁、推溜、拉溜、喷雾等功能。并能够通过参数设置的方式,对成组控制的数量和方向等参数进行选择,实现远程手动控制。
2) 自动开采。支架电液控制系统能够根据工作面设备的实时工况条件,启动自动化开采功能,与采煤机系统进行配合,通过智能控制平台的统一调度,实现工作面全采煤工艺过程的自动化开采。工艺段包括:中部正常割煤、两端头斜切进刀、两端头清煤、两端头割三角煤等。支架动作包括降架、拉架、抬底、升架、伸收互帮、伸收伸缩梁以及成组推溜等。各动作应该与采煤机紧密配合,符合现场的采煤工艺要求。能够根据不同的采煤工艺要求进行相应的参数设置,便于操作人员根据不同的地质条件进行相应的调整,更好地符合工人的操作习惯和现场的工况要求,实现智能化开采。
此外在自动化开采过程中,影响开采效率的主要是支架动作的效率。为解决门克庆煤矿3103智能化工作面作为门克庆煤矿的主力生产面的产量要求问题,必须解决限制智能开采效率的一个瓶颈问题——液压支架的动作效率问题[10-11]。目前行业内设置的开采速度主要以支架降移升小循环的速度为主,如果采煤机速度过快则无法满足支架降移升小循环动作的时间要求,容易出现丢架的问题,造成工作面设备无法正常跟机拉架,容易造成安全事故,因此为解决高速开采的要求,需要提升支架的动作效率,更好地配合采煤机实现高效开采。项目在研发时需要重点考虑通过支架电液控制系统软件程序解决支架跟机拉架的动作方式和动作效率,实现不同速度模式和工况模式下的智能化开采。
2.2 采煤机智能控制系统
门克庆煤矿现有的采煤机为艾柯夫SL900型采煤机,其设备原配有远程控制器和自动化开采系统,并且可以按照要求开放所有数据接口,将采煤机工况监测数据(包括电机温度、电流、油温、冷却水流量等)传输至集中控制系统,但采煤机牵引速度、采高、启停等控制参数程度需要进一步协商。且原有采煤机不支持精确定位和远程控制功能。因此要实现采煤机的智能化开采需要对采煤机的电控系统进行改造,使其设备监控及自动化功能满足智能化开采要求。采煤机系统需要重点做好以下几个方面的研究工作。
①如何有效保留现有采煤机监测功能;②定制化开发采煤机的控制功能;③开放最高控制权限—允许智能控制平台对其进行控制。
2.2.1 采煤机实现工况数据监测功能
采煤机电控系统能够在保留原有传感器的基础上,通过原厂传感器,识别采煤机的牵引方向、速度、速度限制、当前位置、支架号、记忆截割工艺段标识(各工艺段的状态反馈)、左右滚筒高度、横向倾角、纵向倾角、左右截割电机电流、左右截割电机温度、左右截割电机状态(停止、运行、故障)、左右牵引电机电流、左右牵引电机温度、左右牵引电机状态(停止、运行、故障)、左右泵电机电流、左右泵电机温度、左右泵电机状态(停止、运行、故障)、破碎电机电流、破碎电机温度、破碎电机状态(停止、运行、故障)、主从变频器转速、主从变频器电压、主从变频器母线电压、主从变频器IGBT温度、变压器温度、左右摇臂行星减速器油温、左右摇臂行星减速器油位、左右摇臂正齿轮腔油温、左右摇臂正齿轮腔油位、左右牵引油温、左右牵引油位等参数。
2.2.2 与第三方通讯功能
智能控制平台与采煤机系统之间采用单模光缆和通讯电缆两种方式连接,两种通讯方式为冗余设计[12]。采煤机与智能控制平台之间的通讯电缆采用采煤机动力线缆中的一对双绞线。集中控制系统与采煤机系统通讯连接如图3所示。

图3 集中控制系统与采煤机系统通讯连接
2.2.3 位置定位功能
采用绝对位置编码器通过采集采煤机的唯一数据,来对采煤机进行实时定位,在刮板运输机机头、机尾挡板处安装采煤机位置复位磁钢,安装位置现场确认[13]。
2.2.4 控制功能
采煤机系统应具有本地、远程控制功能,采煤机具有本地控制和远程控制开关,只有在远程控制模式下,采煤机才可在智能控制平台下实现远程控制功能[14]。
1) 人工远程控制模式:采煤机的左右截割启停、左右摇臂升降、左右泵电机的启停、破碎电机启停、左右牵引启停、左右牵引方向加减速、牵引停止、故障信息复位、硬接点急停。
2) 自动化远程控制模式:采煤机具有记忆截割功能,采用记忆截割自动化开采模式,可进行人工远程干预,可对干预结果选择性存储。
2.2.5 工作面全过程的记忆截割功能
先由采煤机师傅割一刀示范刀,然后控制系统会将采煤机的各个信息,包括位置、割煤方向、割煤高度和速度等存入控制器中,随后的自动化割煤流程由记忆的工作参数自动控制运行。单轨迹记忆截割图和双轨迹记忆截割图,分别如图4、图5所示。
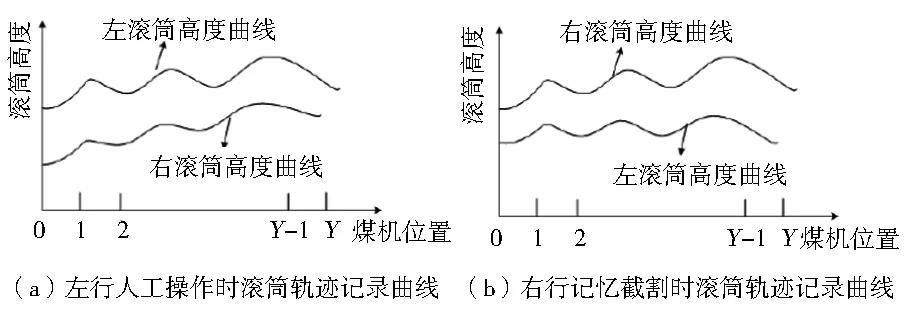
图5 双轨迹记忆截割
2.2.6 生产工艺
采煤生产工艺段包括:机头至机尾正常割煤、机尾扫底、机尾斜切进刀、机尾割三角煤、机尾扫底、机尾至机头正常割煤、机头扫底、机头斜切进刀、机头割三角煤、机头扫底。
各个工艺段的次数能够进行参数化设置,适应不同矿井开采的实际情况。工艺段划分如图6所示。
图6 工艺段划分图
2.3 视频监控控制系统
门克庆煤矿工作面环境复杂,开采条件较差,为满足数据准确性、时效性等要求,需要研究一套视频系统,该套系统的设计需具备采煤工作面照度低、粉尘浓度大、空气湿度大、干扰强现场长期使用等基本条件。将主要在以下方面进行研究:①井下综采面视频监控系统;②地面视频处理系统;③远程视频访问系统;④与第三方数据交互。
2.3.1 井下综采工作面视频显示技术
井下综采面视频监控系统用来采集井下视频信号,同时将所采集到的信息利用多种转换模式通过上位机控制显示到多台监视器上[15-16],该系统可控制最多8台监视器的同步输出,输出模式有:单画面、四画面。
2.3.2 视频监视画面控制及传输技术
视频控制分为自动跟机模式和手动显示输出模式两种。操作人员可通过上位机操作面板、键盘、鼠标等在上位机软件进行切换输出。系统每台摄像机均具备56组防区设置及防区内自动跟踪功能。操作板内可以控制单台显示器显示画面的数量,还能够在不同的画面之间任意高速切换。通过操作面板还能够设置摄像仪的初始位置、旋转动作及清洁功能。
2.3.3 综采工作面图像采集技术
本次图像采集将融合国内最先进的高清云台旋转摄像仪。该摄像仪采用海康威视高清摄像头,同时防爆面通过纳米材料处理,可增加成像的清晰度,减少粉尘附着的概率,并具有自动清洗功能。该高清云台摄像仪为嵌入式万向摄像仪(KBA127(A)),具有水平360°/俯仰180°全方位旋转监控的特性。高清云台摄像仪及级联方式如图7所示。
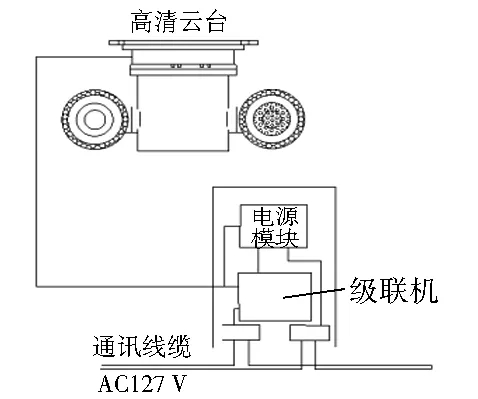
图7 高清云台摄像仪及级联方式
整个工作面视频监控系统共布置4组摄像机:45个高清云台摄像仪(KBA127(A))每隔4架安装在工作面支架上,3个高清云台摄像仪(KBA127(A))分别安装在刮板机机头、超前支护,转载机上。1台定点护罩安装在设备列车上。1台定点护罩(KBA12)安装在胶带机机尾。高清云台摄像仪为嵌入式摄像仪,将摄像头安装在液压支架的顶梁上。
2.3.4 数据传输技术
支架摄像机的通讯采用1根6类网线串接实现通信,并通过一组D6的电源线串接供电,摄像机将采集到的数据传输至光端机处,经过光端机间的主干网络进行汇总传输至顺槽综合处理器处,光端机之间铺设1 000兆通信干道,保证数据传输的流畅和实时性;光缆接口采用光法兰快速接插方式,以便光缆被损坏后快速更换与维护;通过内部处理芯片和主干网络带宽的保障,整体通信延迟比可达到0.6 ms,高清通信清晰度达到1 080 P,并保证图像无马赛克、无卡屏;该系统采用级连式传输,便于故障查找和排除。隔架之间采用标准长度的快速接插,当线缆损坏后可快速恢复备用线缆,让线路恢复变得更为简单。
同时井下视频监控系统将所采集到的原始数据通过一芯光缆发送至地面视频处理系统。地面视频处理系统是用来将井下发送上来的数据解压、还原并输出至最多3个大屏幕以备查看,同时实现视频信息归类和存贮录像、录像反调等功能,该系统具备48个视频录像的处理容量,可供一个工作面加部分地面监控摄像机的图像处理,且该系统具备满负荷至少30 d的录像存贮[17]。远程视频访问系统是基于网络视频的系统,该系统可将视频信息以局域网、工业环网、以太网等模式发送到个人电脑、办公电脑、工业服务器等客户端查看,可最多支持99个用户的访问(也可以升级至999用户);且该系统具备手机WAP访问功能,可在智能手机上安装手机客户端软件,从而支持手机上网的用户实现登陆查看视频图像。
2.4 智能平台控制系统
智能控制平台是整个自动化开采系统的“大脑”,负责协调指挥整个系统各级的自动化动作。智能控制平台的稳定性和可操控性将决定整套系统的成败。
智能控制平台位于集中控制室内,主要放置在顺槽设备列车上,用于放置集中控制系统和监控系统的监测装置、操控装置及核心主机,是煤矿井下综采自动化实现的核心区域,操作人员可以通过对智能控制平台的操作实现工作面的自动化采煤。
2.4.1 结构设计原则
按照集控室内需摆放设备的外形及安装尺寸,合理规划布局,设计三维效果图。
由于在煤矿井下使用环境湿度大,集中控制室的设计应考虑到煤矿井下的特殊环境,注意防尘、防潮,要做好防锈处理。
煤矿井下顶部有滴水,集控室应采取防水措施。
集控室内部结构应坚固耐用,考虑到运输、安装、起重条件的限制,其外形尺寸和重量应尽可能小,满足煤矿使用要求。
2.4.2 设计特点
集中控制室的外形应简洁,同时满足矿方设备列车的尺寸要求。考虑在煤矿井下使用环境湿度大,集中控制室的设计应防尘、防潮、防水、防锈。此外,集控室内部放置的控制平台都是精密元器件,集中控制室在整体结构设计方面应坚固耐用,防止受到运输、安装、起重方面的影响,对内部设备造成磕碰。因此,集中控制室在研发设计时具有以下特点:
1) 前门采用左右推拉结构,窗口采用防爆玻璃,尽可能加大了玻璃的面积,前门滑道坚固耐用,底部滑道留有缝隙,防止煤泥堵塞影响开关门;
2) 工作台按斜面设计,便于使用者操作;
3) 集控室上方预留吊装螺栓,底部预留叉车孔,便于装卸;
4) 集控室内部左侧和右侧预留安装螺钉和穿线孔,便于以后增加设备;
5) 集控室内部结构坚固耐用,保证安装设备后在吊装、运输及移动中不开焊、不变形,顶面具有一定的抗压强度,满足矿方架设动力电缆的使用需求;
6) 为便于内部安装接线,后部分成4个小门,可独立拆卸,左右两侧门采用可拆卸转动对开结构;
7) 集控室内所有摆放设备均用螺栓固定,空余的位置尽可能多地焊接固定条或螺栓,用于安装后期增加的设备或固定控制电缆;
8) 煤矿井下顶部有滴水,集控室采取防水措施,防止顶部积水导致漏水,集控室内地板具有漏水孔;
9) 由于在煤矿井下使用环境湿度大,集控室为了防锈,内、外全部喷漆,外面喷涂(喷塑)白色漆,漆面光滑、均匀、美观。集中控制室正面和侧面设计如图8所示。

图8 集中控制室正面和侧面设计
同时充分考虑内部设备尺寸、功能布局要求,实现控制平台核心部件均在控制室内部安装摆放。为了实现综采工作面智能化控制,集中控制室除了可编程控制箱、直流稳压电源、计算机安装外,其余位置还需安装其他厂家的集控设备、视频系统、支架电液控系统、采煤机系统和语音闭锁系统,根据各个厂家设备尺寸重量及使用条件,合理安排布局位置,方便安装及日常维护,内部设备安置如图9所示。
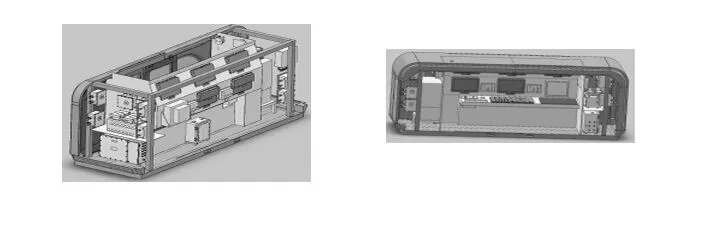
图9 内部设备布置
2.4.3 智能控制平台软件设计
智能控制平台软件系统采用成熟的客户端/服务端架构的模式进行设计开发。根据服务内容不同,两端口运行的程序不同。服务器端主要用来进行数据交互与管理、系统维护等功能;客户端用来实现对井下设备控制,系统数据交互,实时工况数据采集,数据分析管理等功能。该系统整体上可以分为以下四个部分:
1) 数据库管理。首先是数据库的建立。根据业务需求,对数据进行结构化分析,用最合理的方式使工况数据实现交互。该数据库结构的设计不仅能够实现数据存储的优化,还能够根据业务需求进行实时调整,当数据库运行过程中存在一定问题时,能够根据实际情况进行实时的调整,以最大限度地满足用户的需求。再次,具有一定的重组功能,当数据库在经过一定时间运行后,因为数据的不断修改与插入,其性能会不断下降,此时,需要对数据库进行重新整理,这种数据库的重组有利于数据库的维护。
数据交互分为系统和数据库及系统和第三方系统之间的交互。与数据交互主要是对数据库的增、删、改、查功能进行交互。能够实时存储从感知层获取的工况数据,能够删除不需要的垃圾数据,能够根据业务需求对相关数据进行查询和修改。与第三方系统进行交互包括与集中控制平台相连的各个子系统,包括采煤机系统、支架电液控制系统、语音通讯系统、三机监测系统、供电系统、供液系统、视频系统、胶带系统、威震系统、人员精确定位系统等。集中控制系统以工业总线和工业以太网的方式从各个子系统获取实时数据,同时能够根据操作人员的业务需求,及时将控制命令和保护命令下发至各个子系统中,实现通过集中控制平台对各个子系统进行协同数据交互的功能。
2) 业务处理部分。该部分主要是为了满足井下采煤的业务需求,而使各个子系统进行数据共享。井下采煤工艺的复杂性和多样性导致了系统的定制化程度相对较高,因此业务处理部分必须针对不同的需求进行定制化设计。该部分充分考虑系统的业务需求、业务逻辑、系统环境、系统稳定性、操作者的使用习惯等多方面因素,从而保证系统的准确、可靠运行,没有明显的逻辑错误和逻辑故障,减少因系统逻辑错误给用户带来的损失和安全隐患。
3) 前端显示部分。该部分主要通过运行系统的各种数据,让操作人员一目了然地找到自己关注的数据和设备运行状态,更友善地服务于操作人员、参观人员和指挥人员,被广大使用者所接受。
前端操作系统的优点首先是具有较高的可靠性。能够在井下恶劣的环境下稳定运行,以保障对现场生产业务的支持。其次,具有较高的安全性。该系统从逻辑设计和后台服务监听等方面都进行了详细的设计和反复的测试。再次,该软件系统采用模块化设计,具有一定的可扩展性。能够根据业务需求进行选择性应用不同的模块业务进行组合,也能够根据后期业务的扩展,增加相应的功能模块。不需要整体修改软件的系统架构,只需要将新业务模块直接挂在整体架构上就能够满足矿方的新业务需求。第四,该软件系统具有便捷的维护功能,软件系统对自身的运行状况能够进行记录,对指令的下发具有可追溯性。能够随时了解该系统的各项指令数据,及时监测软件的运行状况。对于使用人员来说,更容易发现系统出现故障的原因及时处理问题。软件架构如图10所示。

图10 软件架构示意
3 结 语
1) 提出了门克庆煤矿智能化开采系统,对采煤机、液压支架和输送机等各系统的各个环节进行了智能化设计。
2) 研制了成套的智能输送机设备,可以对输送机实时监测,实现智能调速、链条自动张紧以及胶带自移机尾遥控操作、破碎机的自动定时定量润滑等功能。
3) 开发了远程移动APP监控系统,实现了对工作面过程监测、环境数据监测、人员监测等功能。
4) 工作面实现了有线无线双通讯传输、采煤机双系统精确定位、工作面关键部位双视频监控、集控双主机冗余备份、设备近地优先操作策略、集控主机通讯中断停机保护系统及系统急停闭锁等功能,有效保障了工作面智能化开采的安全可靠性。