基于三矢量模型预测电流控制的共模电压抑制策略
2021-02-05程勇,刘倩
程 勇, 刘 倩
(西安科技大学 电气与控制工程学院,陕西 西安 710054)
0 引 言
永磁同步电机(PMSM)具有体积小、结构简单、、可靠性高等优点,广泛应用于航空航天、船舶、电动汽车等领域。在PMSM逆变器驱动系统中,共模电压过高造成驱动系统过压、辐射电磁波等问题可忽视。共模电压抑制方法一般可分为硬件抑制方法和软件抑制方法,硬件抑制方法需要增加额外的设备,实现较为复杂,因此一般采用软件抑制方法[1-4],文献[1]提出了一种无零矢量调制(NSPWM)方法来抑制共模电压,文献[3]考虑死区的影响,提出了改进的NSPWM方法。
PMSM电流控制采用PI控制时,PI调节系数的设计复杂,对PI参数精度要求高,参数失调对系统的稳态和动态性能影响较大,因此文献[5-11]采用模型预测电流控制(MPCC)。MPCC不需要进行PI参数整定,具有开关频率固定、电流谐波小和动态响应快等优点。按照每个控制周期作用矢量的数目,MPCC可以分为单矢量、双矢量和三矢量。文献[6]运用三相电压矢量将相平面划分为3个扇区,进行电流预测迭代,来获取三相开关驱动脉冲的占空比,提升了系统的稳态性能。文献[9]在一个控制周期内计算有效电压矢量和零电压矢量作用时间,利用占空比思想进行脉宽调制(PWM)。文献[11]提出了一种三矢量MPCC策略,对d、q轴电流同时实现了无差拍控制,有效地减小了电流脉动。
文献[12-13]利用非零矢量和MPCC结合来达到共模电压抑制和减小电流脉动的效果。文献[12]每个控制周期内通过2个非零矢量合成目标电压矢量,抑制了共模电压,但电流脉动仍较大。文献[13]方法分为3步,最终选择精简的具有零共模电压特征的电压矢量作为模型预测的向量集,设计电机驱动的模型预测控制方法,计算量较大,对硬件要求较高。
PMSM单矢量MPCC共模电压抑制策略电压矢量幅值和方向均不可调,导致d、q轴电流脉动较大。本文基于NSPWM提出了一种三矢量MPCC共模电压抑制策略,在每个扇区内利用3个非零矢量合成目标电压矢量,电压矢量的覆盖范围增大且幅值和方向可调,有效抑制共模电压的同时减小了电流脉动。仿真和试验结果证明了所提方法的可行性和有效性。
1 单矢量MPCC共模电压抑制策略
1.1 共模电压产生原理
PMSM逆变器驱动系统如图1所示。共模电压定义为定子绕组中性点n与大地(电机外壳)g之间的电势差ung[14]。则有:

图1 PMSM逆变器驱动系统
ung=uno+uog
(1)
其中,uog与uno相比,值很小且变化很缓慢,因此将uog忽略,则近似可得ung≈uno,有:
(2)
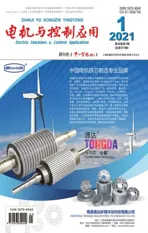
PMSM逆变器开关状态“1”表示上桥臂导通,下桥臂关断;“0”表示上桥臂关断,下桥臂导通,8种工作状态定义为U0~U7,由式(2)可得8种工作状态对应的共模电压如表1所示。
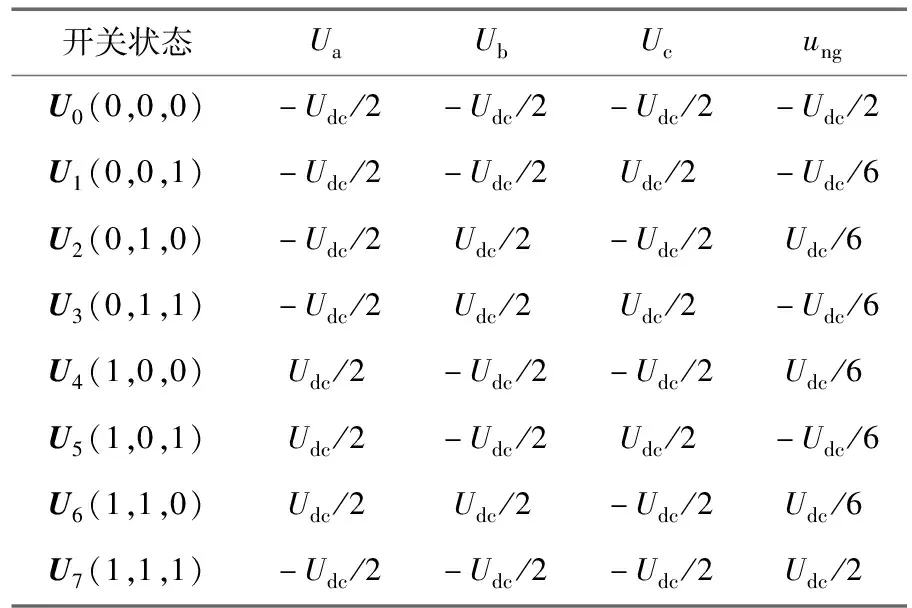
表1 8种开关状态对应的共模电压
电机三相定子绕组中性点对地共模电压波形如图2所示。其中,Ts为PWM开关周期。

图2 共模电压波形
可以发现,零矢量作用时,产生幅值为±Udc/2的共模电压,非零矢量作用时,产生幅值为±Udc/6的共模电压,因此本文通过避免使用零矢量来达到抑制共模电压的目的。
1.2 单矢量MPCC共模电压抑制策略
本文采用转子磁场定向方式,则PMSM在d、q坐标系下的电压方程可表示为[9]
(3)
(4)
式中:ud、uq、id、iq分别为d、q轴电压和电流分量;Rs为定子电阻;ωre为转子电角速度;Ld、Lq分别为d、q轴电感分量;ψf为永磁体磁链。
可得PMSM在同步旋转坐标系下的定子电流状态方程为
(5)
(6)
前向欧拉法离散化得到d、q轴电流预测式:
ωre(k)Lqiq(k)]Ts
(7)
ωre(k)Ldid(k)-ωre(k)ψf]Ts
(8)
式中:id(k+1)、iq(k+1)为下一时刻的d、q轴电流预测值;id(k)、iq(k)分别为当前时刻的d、q轴电流反馈值;Ts为采样周期;ud(k)、uq(k)分别为当前时刻的d、q轴电压;ωre(k)为当前时刻的转子电角速度。
dq轴电流的预测值与给定值差值的绝对值之和作为优化目标,建立价值函数:
(9)

单矢量MPCC共模电压抑制策略在每个控制周期由一个非零矢量进行作用,需要对id和iq进行6次预测,利用价值函数进行6次评价,选择出最优开关序列给逆变器。传统单矢量MPCC共模电压抑制策略系统框图如图3所示。
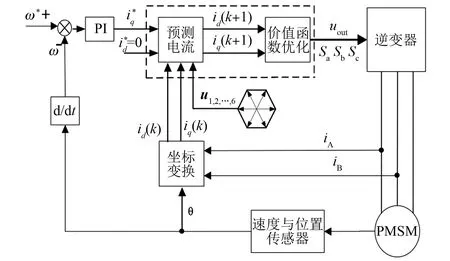
图3 单矢量MPCC共模电压抑制策略系统框图
2 三矢量MPCC共模电压抑制策略
2.1 NSPWM原理
NSPWM在每个扇区由3个相邻的电压矢量来合成参考矢量[2],如图4所示。扇区由划分方式的不同可分为A类扇区和B类扇区。A类扇区定义0°~60°为第一扇区,而B类扇区定义-30°~30°为第一扇区,NSPWM—般采用B类扇区。目标矢量位于第二扇区时作用矢量为U1、U2、U3,如图5所示。
图4 基本电压矢量和扇区的划分

图5 NSPWM合成矢量示意图
2.2 三矢量MPCC共模电压抑制策略
三矢量MPCC共模电压抑制策略基于NSPWM调制方法,在每个控制周期内有3个非零矢量作用来合成期望目标电压矢量,由价值优化函数选出最优目标电压矢量,之后经过NSPWM调制输出脉冲信号给逆变器,控制框图如图6所示。
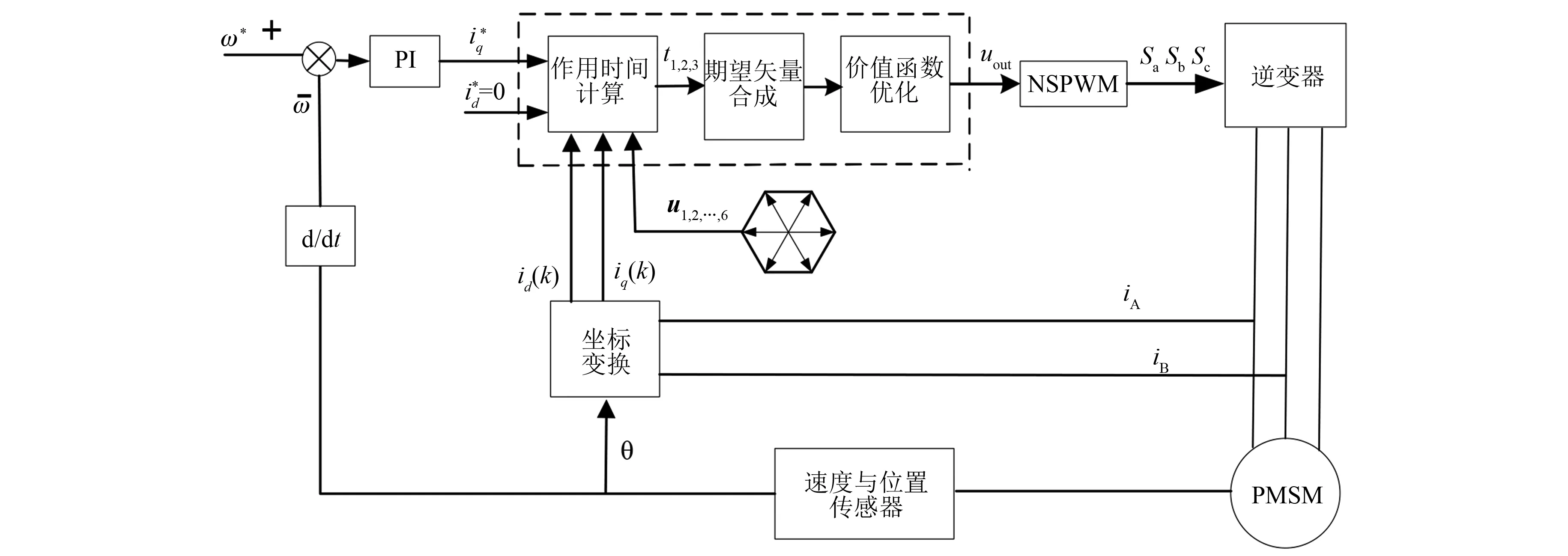
图6 三矢量MPCC共模电压抑制策略框图
电压矢量分组方式基于NSPWM方式,每个扇区由相邻3个非零电压矢量来合成目标电压矢量。因此,基于NSPWM三矢量模型预测控制的电压矢量共有6组,具体分组如表2所示。
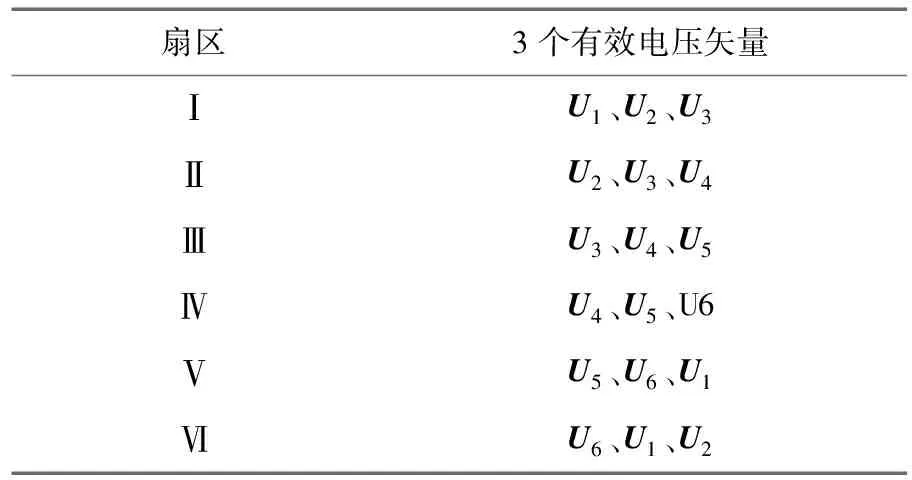
表2 NSPWM三矢量MPCC电压矢量选择表
确定三矢量分组后,要对各基本矢量作用时间进行分配来合成目标电压矢量。为了使d、q轴电流无误差跟踪给定值,d、q轴电流采用均无差拍控制,下一时刻预测值与给定值相等,此时电流预测方程可表示为
(10)
(11)
且有:
(12)
i=1,2,3
(13)
式中:δd1、δd2、δd3、δq1、δq2、δq3分别为3个非零矢量对应的d、q轴定子电流的斜率;t1、t2、t3为3个有效矢量在一个控制周期内的作用时间;udi、uqi为基本电压矢量在d、q轴上的投影。
3个矢量作用时间的和为采样周期,即:
Ts=t1+t2+t3
(14)
联立式(10)~式(14)可得:
(15)
(16)
t3=Ts-t1-t2
(17)
由3个有效矢量作用时间和基本电压矢量的d、q轴分量可得到期望电压矢量在d、q轴的电压分量分别为
(18)
(19)
将计算得到的ud、uq代入式(7)、式(8)得到相应的d、q轴电流预测值,将得到的电流预测值依次代入式(9)的价值函数中,选取使价值函数最小的期望电压矢量作为最优矢量uout作用于逆变器。
三矢量MPCC共模电压抑制策略流程图如图7所示。

图7 三矢量MPCC共模电压抑制策略流程图
3 仿真分析
为了验证三矢量MPCC共模电压抑制方法有效性,基于MATLAB/Simulink,首先对空间矢量脉宽调制(SVPWM)调制方法下的PMSM矢量控制系统共模电压进行仿真验证,之后分别对单矢量MPCC共模电压抑制方法和三矢量MPCC共模电压抑制方法进行了仿真验证和比较分析。仿真选取的PMSM参数标称值如表3所示。仿真中,转速环PI调节参数取值相同,采样周期为10-5s,直流侧电压Udc取311 V。给定转速400 r/min,0.2 s时升速至800 r/min,0.5 s时降速至600 r/min。

表3 PMSM仿真参数标称值
SVPWM方法下PMSM矢量控制系统共模电压仿真波形如图8所示。由图8可以看出,直流侧电压Udc取311 V,开关周期取0.000 1 s时,PMSM在SVPWM调制方法下的共模电压在±155.5 V,即±Udc/2之间波动,波形与上述原理分析相同。

图8 SVPWM方法下PMSM矢量控制系统共模电压仿真波形
图9是单矢量MPCC共模电压抑制策略仿真图。共模电压在大约±52 V即±Udc/6之间波动,共模电压得到有效抑制;起动后,转速在大约0.01 s达到400 r/min,升速时经大约0.02 s到800 r/min,降速至600 r/min时响应时间约为0.013 s,电机响应速度快,动态性能较好;稳态时d、q轴电流均在±2 A之间波动,波动较明显。

图9 单矢量模型预测电流控制共模电压抑制策略仿真波形
图10是三矢量MPCC共模电压抑制策略仿真波形图。共模电压在大约±52 V即±Udc/6之间波动,共模电压得到有效抑制;起动后,转速在大约0.01 s达到400 r/min,升速响应时间约为0.012 s,降速响应时间约为0.007 s,动态性能相对于单矢量MPCC共模电压抑制策略较好;稳态时d、q轴电流均约在±0.4 A之间波动,相对于单矢量MPCC共模电压抑制策略电压脉动得到有效改善。
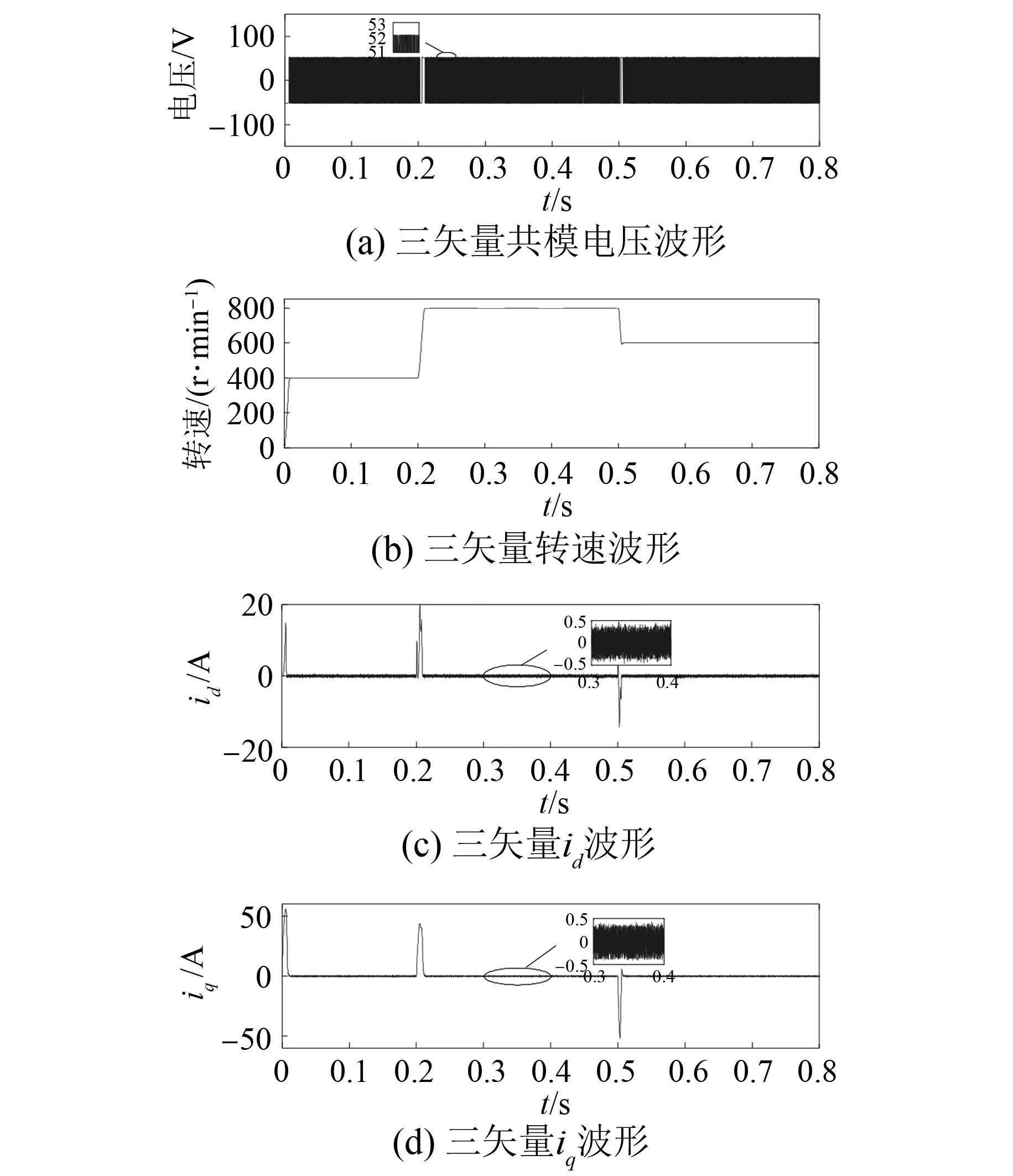
图10 三矢量MPCC共模电压抑制策略仿真波形
4 试验验证
为了验证三矢量MPCC共模电压抑制策略的有效性,采用TI 公司生产的信号处理器TMS32F28335芯片为控制芯片,在硬件平台上首先对SVPWM方法下的PMSM矢量系统进行试验,验证共模电压大小,接着对单矢量、三矢量MPCC共模电压抑制2种策略进行突加、降负载及稳态试验。试验中,所用的PMSM参数列于表4中。采样周期均取10 kHz,直流侧电压Udc取50 V,转速环PI参数相同。PMSM给定转速120 rad/s,带1 N·m负载起动,在7 s时突加2 N·m负载,14 s时突降负载为0。
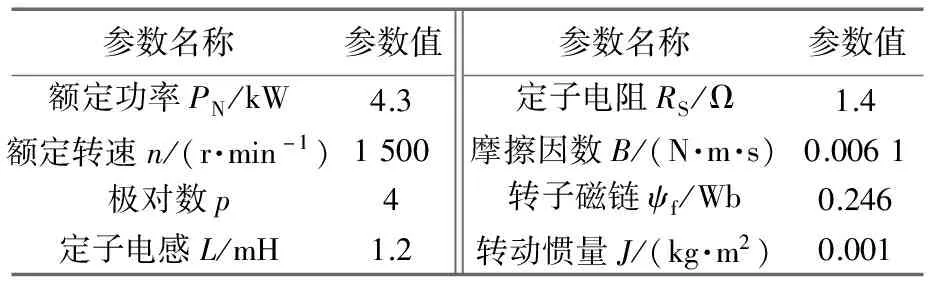
表4 PMSM试验参数值
如图11所示,共模电压由示波器显示,每格5 V,可以看出试验中,SVPWM方法下PMSM矢量控制系统共模电在±Udc/2之间波动。

图11 SVPWM方法下PMSM矢量控制系统共模电压试验波形
单矢量和三矢量MPCC共模电压抑制策略试验波形如图12、图13所示。

图12 单矢量MPCC共模电压抑制策略试验波形
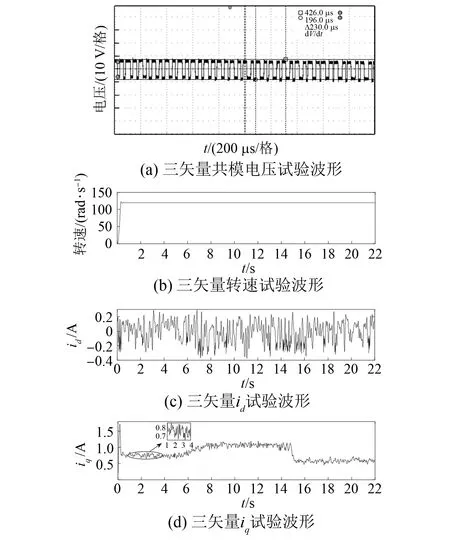
图13 三矢量MPCC共模电压抑制策略试验波形
从图12(a)、图13(a)可以看到2种控制策略下共模电压均抑制在±Udc/6之间;图12(b)、图13(b)为突加、减负载转速波形试验图,单矢量控制策略转速在减负载时轻微波动后迅速返回给定值,三矢量策略转速波动不明显;稳态时,d轴电流id由单矢量策略下的±2A降至-0.4~0.3 A之间,q轴电流iq波动由单矢量策略下的1.3 A大约降至0.18 A,电流脉动得到有效抑制。
5 结 语
针对PMSM逆变器驱动系统共模电压较大的问题,提出了三矢量MPCC共模电压抑制策略。该策略矢量分组基于NSPWM调制方法,在一个控制周期利用3个非零电压矢量作用获得良好的电流控制效果,有效抑制共模电压的同时减小了电流脉动,提高了PMSM驱动系统的稳定性和可靠性。通过系统仿真和试验验证了所提控制策略的可行性和有效性。