地铁车站环境温度自动控制系统分析与改进
2021-02-04张亚社
张亚社
(西咸新区轨道交通投资建设有限公司,710003,西安∥高级工程师)
在空调季节西安地铁1 号线个别车站环境温度冷热不均,乘客多有投诉。为了应对此状况,在空调季节车站采取人工调节环境温度,以确保站内环境温度平稳、舒适。相比于自动调节方式,人工调节一方面增加环控设备能耗,另一方面给站务人员的工作带来不便。为此,本文提出了地铁车站温度控制的新思路,以期解决此问题。
1 地铁车站环境温度自动控制现有算法分析
目前,西安地铁1 号线车站BAS(环境与设备监控系统)中站内温度自动控制程序采用的是单级PID(比例-积分-微分)调节算法。通过分析发现传统的单级PID 调节算法在站内温度自动控制过程中有以下不足之处:
1)算法中不区分普通车站与换乘车站,调节时间均采用300 s,忽略了车站规模的不同。空调系统启动后站内温度达到稳定时所需时间不同,在这种情况下极易造成不同规模车站站内温度冷热不均。
2)算法中将温度计算偏差和计算偏差变化值设计预先固定在[-3.0 ℃,3.0 ℃]范围内,影响了车站二通阀动作的准确性,使之不能随着站内温度细微变化而适当调整。
3)二通阀的动作开度输出值为500+u×1 000/6,其中u 为PID 输出量。系数1 000/6 与500 没能根据各站情况分别设计,不能正确反映各站二通阀开度与站内温度的关系。
2 地铁车站环境温度自动控制系统的改进措施
为确保站内温度舒适并相对平稳,车站温度自动控制算法就应该能准确、快速、可靠地调整站内温度。当前广泛应用于空调控制系统的串级控制算法是一种能够满足车站环境温度自动控制要求的高品质算法,其优点体现在以下几个方面:
1)在受到干扰前副回路就能很好地对副回路的被控量进行适当修正和控制。
2)副回路在车站温度自动调节过程中,始终对副过程中参数的变化进行及时调节和修正,弱化车站环控系统冷冻水温和水流量变化对车站公共区温度的影响。
3)串级控制算法可以提供比单级PID 调节算法更快的响应速度。
2.1 地铁车站环境温度串级控制算法设计
为了能够很好地实现地铁站内环境温度串级控制,鉴于送风温度能较早地体现扰动影响,便于调节器快速做出相应反应,站内公共区送风温度作为辅助信号是个比较好的选择。构建主回路以车站公共区平均温度作为主调参数、副回路以车站公共区送风温度作为副调参数的串级控制算法(框图如图1所示)。以主回路车站公共区平均温度输出值来修正调节车站公共区送风温度初始值t。对于主回路,因为车站站厅、站台温度存在滞后大、干扰频繁以及站内多台空调机组分时段分模式同时作用的问题,PID 调节算法难以对此胜任,可以采用具有解耦特性优点的模糊控制算法;对副回路仍可采用PID 调节算法。这样可以减少串级控制算法的复杂性,起到优化作用。

图1 车站公共区温度串级控制算法框图
2.2 副控制回路(送风温度PID 控制)
地铁车站温度控制系统普遍都存在一定程度的容量滞后和纯滞后性,当车站温度控制系统遇到大的干扰时(比如空调系统开始运行与停止运行时),PID 调节算法中积分项的累积可以导致二通阀动作超过其最大范围,严重时促使整个温度控制系统超调甚至振荡。为了解决此问题,可以采用积分分离算法:在程序中设定阈值ε>0,当|En|>ε 时(En为第n次采样时刻的温度偏差值),依靠PD(比例-微分)控制,提高整个空调系统响应速度,以尽可能避免大的温度超调;当|En|≤ε,通过PID 调节,可确保精确度。副控制回路算法的框图如图2 所示。

图2 副控制回路算法框图
2.3 主回路控制(模糊控制)
在地铁车站公共区温度自动控制系统中,公共区送风温度初始值一般设定在25 ℃~30 ℃之间,车站环控系统根据车站公共区送风温度设定值计算出车站空调冷负荷,然后依据计算冷负荷超过机组额定冷负荷的50%时开2 台空调机组和计算冷负荷低于机组额定冷负荷的50%时开1 台空调机组的原则,适当开启空调机组和冷水机组,此过程存在多输出耦合。主回路中采用模糊控制算法,利用模糊控制解耦特性,可克服多输出耦合影响,改善系统动态特性,提高系统的控制效果。
2.3.1 模糊控制器的结构设计
为了克服多输出耦合影响,设计好的模糊控制器十分关键。二维模糊控制器结合PID 调节器是一个很好的设计思路。设模糊控制器输出Δkp、Δki、Δkd和PID 调节器的比例增益、积分增益、微分增益(kp、ki、kd)一一对应,并按照以下各式进行整定:kp=kp,0+Δkp;ki=ki,0+Δki;kd=kd,0+Δkd。式中,kp,0、ki,0、kd,0是PID 预定值。则模糊控制器结构框图见图3。地铁车站公共区温度输出值和设定值的差e 及微分de/dt 后的结果,通过模糊化处理得到二维模糊控制器的输入变量偏差E 和偏差变化率CE,用二维模糊控制器输出变量来整定PID 调节器各参数。PID 调节器输出量对二通阀开度进行控制,以实现车站公共区温度的实时调节。

图3 模糊控制器结构框图
2.3.2 输入量的模糊化
E、CE是模糊控制器的2 个输入变量,Δkp、Δki、Δkd是其3 个输出量,论域内模糊变量的模糊子集可取NB(负大)、NM(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)、PB(正大)。模糊语言变量的论域可取[-3,3]中的整数。模糊语言变量隶属函数见表1。
2.3.3 参数的整定规则和控制过程
针对不同阶段的|E|、|CE|,PID 参数整定遵循如下原则:
1)kp取值基本和|E|同步,|E|较大时kp也取大值,以增强响应速度;|E|较小时kp取小值,以防止超调并减少振荡;|E|持续变小时kp也继续减小,以确保尽快稳定。当然,kp取值也要参考|CE|的情况,|CE|和|E|同号时应适当增大kp;|CE|和|E|异号时应适当减小kp。
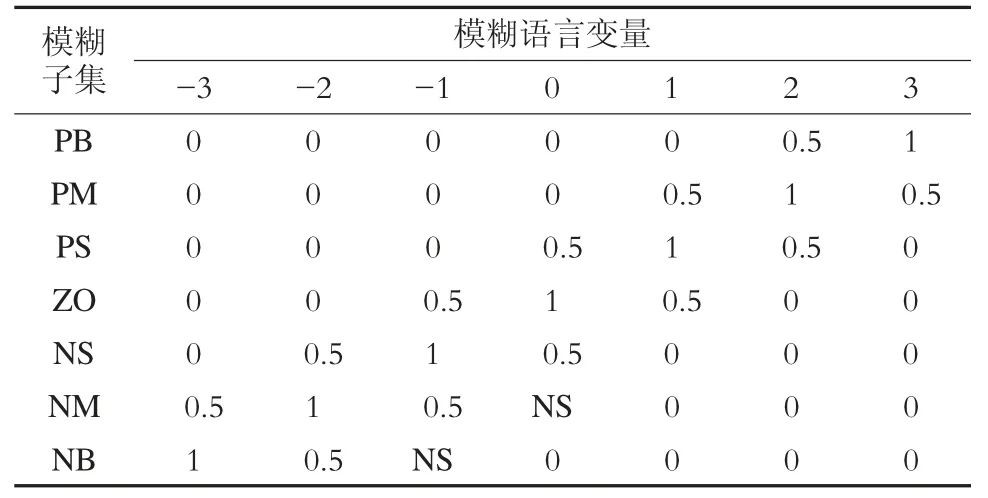
表1 模糊语言变量隶属函数
2)ki的取值需严格遵循积分分离要求,|E|较大时,ki取零值,避免超调;|E|较小时ki随|E|的减小应增大,以保证积分环节有效、消除稳态误差、提高控制精度。
3)车站环境温度自动控制系统控制开始时,|E|较大时kd应取小值,以避免偏差瞬间变大,造成微分溢出;|E|变小时kd应取适当的值,以提高响应速度,同时保证抗干扰能力。
车站温度自动控制过程如下:比较车站公共区温度的平均值与公共区温度的预设值,其E 为模糊控制器的一个输入量;E 的当前值减去其前次的测定值即为偏差变化率CE,CE为模糊控制器的另一个输入量。继续模糊化E 和CE,可分别得到E 和CE的子级;经过模糊决策后最终获得控制量U(二通阀开度值)。模糊控制器的两个输入变量E、CE和最终的控制输出量U 的隶属函数见图4。
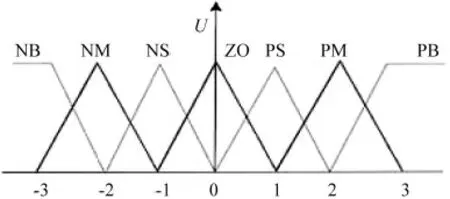
图4 E、CE 隶属函数
3 结果的分析对比
为了验证改进后控制策略的性能,在Matlab 软件中分别对单级PID 控制算法和串级控制算法进行仿真测试,取设定温度为26 ℃,仿真时间为1 000 s。
3.1 单级PID 控制仿真试验
在Matlab 软件Simulink 工具中调用Discrete PID Controller 模块,仿真框图如图5。经多次仿真试验,取kp=0.02,ki=0.01,kd=16。PID 算法阶跃响应仿真曲线如图6。

图5 单级PID 控制仿真框图(截图)
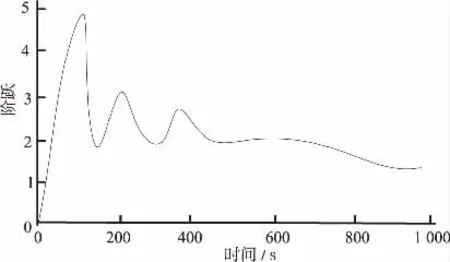
图6 PID 控制算法阶跃响应仿真曲线
3.2 串级PID 控制仿真试验
串级PID 控制需找出3 个输出量和2 个输入量之间的关系。测试中通过不断地检测E 和CE,再根据模糊控制原理对参数进行在线修改,以满足不同的E 和CE对控制器参数的不同要求,从而使被控制对象具有良好的性能。串级PID 控制仿真框图如图7。参数采用表1 中数据,串级控制算法阶跃响应仿真曲线如图8。

图7 串级PID 控制仿真(截图)
3.3 仿真结果分析
1)在地铁空调系统运行过程中,受到来自机器内部频率及外界环境等诸多因素的干扰,为了使地铁车站环境温度波动性减小,只采用单级PID 控制技术是不能达到要求的,还必须针对地铁空调的干扰量多、非线性延迟现象严重等问题,加入非线性控制方式。即在地铁空调系统运行过程中,根据该系统的非线性动态特征,采取非线性的参数自整定方式。
2)在地铁车站环境温度控制过程中,利用串级PID 模糊技术对控制器的参数进行在线调整,这样的控制措施有利于增强系统的鲁棒性,即对外界干扰的适应性,同时也加强了车站环境温度控制系统响应的精确性。
3)在原来PID 控制基础上加入模糊控制后,车站环境温度控制系统的振荡明显减弱,提高了系统的稳定性。从现实的角度来考虑,这是一种节能且使机器磨损很小的控制方式。
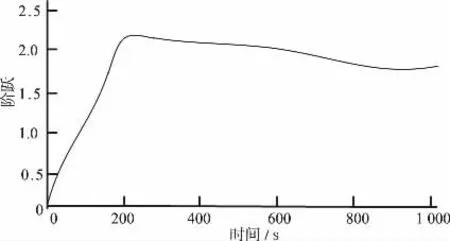
图8 串级控制算法阶跃响应仿真曲线
4 结语
地铁车站采用环境温度串级控制系统能很好地结合模糊控制和PID 控制,给地铁车站这种大延时、大空间、非线性及时变的环境温度控制提供了一个较好的思路。其具有良好的动、静性能以及较强的鲁棒性,是一种实用、有效的环境温度控制系统。