组合机器人及视觉检测搬运控制系统实验平台设计
2021-02-02李省委
李省委,王 伟
(闽南理工学院a.实践教学中心;b.光电与机电工程学院,福建 石狮 362700)
自从1962 年美国研制出世界上第一台工业机器人以来,机器人技术及其产品就得到迅速发展,它已成为柔性制造系统、自动化工厂、计算机集成制造系统的自动化工具[1]。机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,它是靠自身动力和控制能力来实现各种功能的一种机器[2]。机器人可以按照控制系统预先设置的程序执行任务,也可以按照人为指挥运行。工业机器人具有多种优势,如节约生产成本、提高生产效率、安全系数较高、便于管理等。
1 平台开发目的及工作原理
1.1 项目培养目标
该项目以能力培养为中心,构建相对独立、内在统一的人才培养体系及能敏锐地反应社会需求、基础实、能力强、素质高、多样化的人才培养模式[3]。让更多的学生了解和走进机器人的实验课堂,培养学生的认知和实际动手能力,为学生步入社会,走向工作岗位奠定基础。机器人实验平台的实物如图1所示。
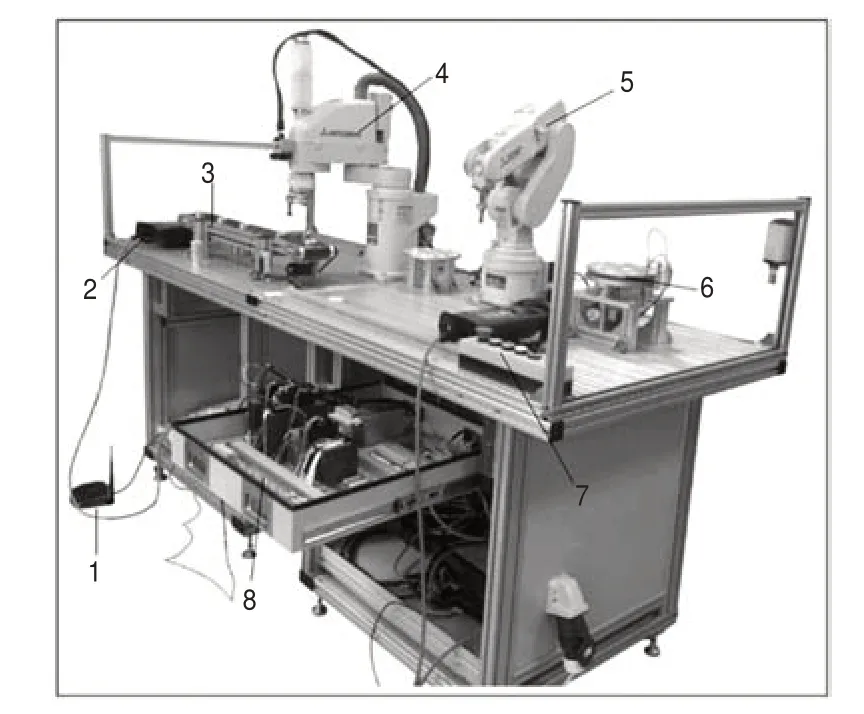
图1 组合机器人实物
1.2 工作原理
1)流水线单元
按下启动按钮,安装于流水线上的对射式光电传感器检测到工件时,由伺服电机驱动的流水线停止工作;否则,流水线继续运转[4]。
2)智能视觉相机单元
工件在流水线上运转到相机识别区域与水平关节机器人在Home 点时,PLC 输出一个触发信号触发照相机拍照。拍照的图案与先前设计的图像进行定位及图案匹配,如匹配成功,则按用户“配置结果-通讯”发送数据;如匹配失败,则发送数据0。
3)智能视觉相机和垂直关节机器人单元
按下启动按钮的同时,视觉相机和两台工业机器人进行初始化。当工件运转到相机识别区域时,流水线暂停并等待下一步指令。首先,水平关节机器人在Home 点时,视觉相机拍照并识别流水线上的工件编码,直至识别成功;然后,将识别成功的工件编码信息发送给水平关节机器人,再由水平关节机器人将信息发送给PLC;最后,水平关节机器人运转到安全区域点等待,若垂直关节机器人不在安全区域,水平关节机器人将流水线上识别的工件抓起,并将工件放置到库盘和工件号对应的库位。该过程按照上述工作流程循环执行[5]。
4)水平关节机器人单元
在上一步的基础上,垂直关节机器人向PLC发送询问。如成功询问到工件信息,垂直关节机器人运转到安全区域等待。如果水平关节机器人不在安全区域,那么垂直关节机器人从盘上抓取工件,并运行到目标盘的工件工位放置处,等待控制系统的放置信号。垂直关节机器人在接收到控制信号后,松开卡抓,将工件放入空置库位。
机器人水平关节和垂直关节动作流程如图2所示。
5)目标盘单元
目标盘转动路程如图3所示。
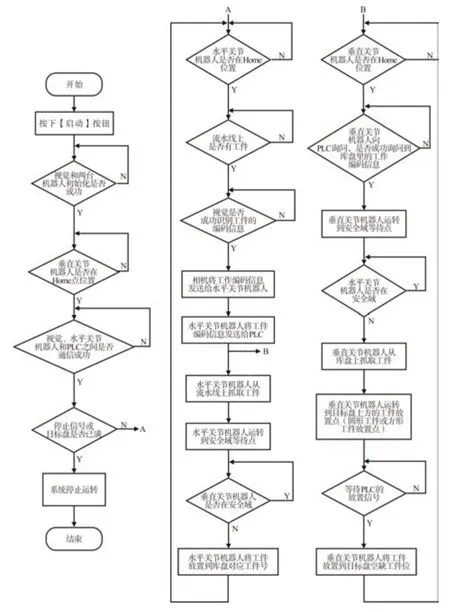
图2 机器人水平关节和垂直关节动作流程
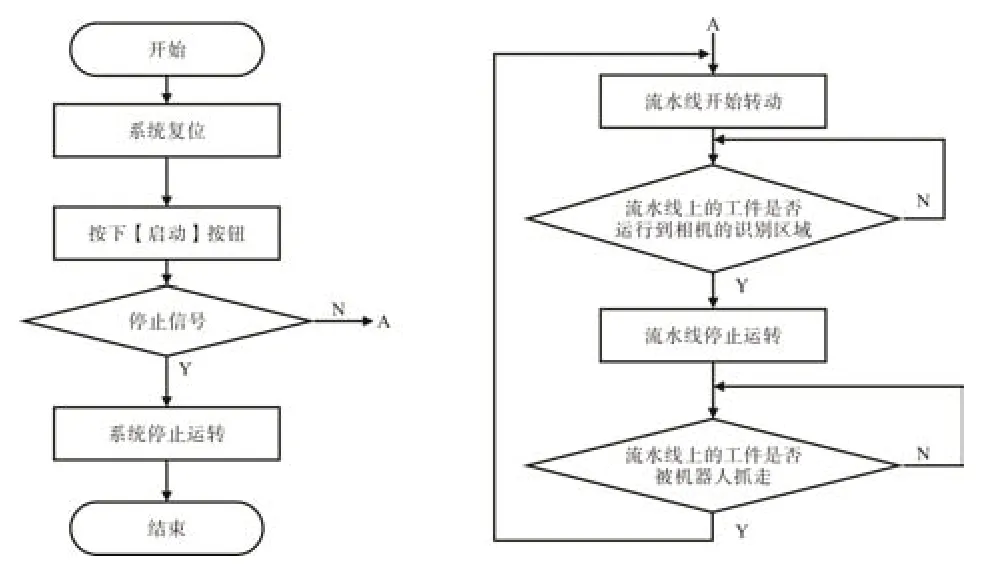
图3 目标盘转动流程
①按下【启动】按键时,目标盘开始工作。
②目标盘单元上对射式光电传感器检测到任何目标盘上的圆形工件库位信号时,PLC 将伺服电机的当前角度位置记录下来,加上两个圆形工件库位之间的偏移角度后,可计算出圆形工件最佳释放位置。当电机运行至该位置后,控制系统发出“释放圆形工件”信号。
③当接近开关传感器检测到信号时,控制系统将伺服电机的当前旋转角度位置记录下来,根据控制系统的参数设定就可以计算出方形工件最佳释放角度位置。当电机驱动目标盘运行至该位置时,控制系统发出“释放方形工件”信号。
2 系统参数设置及PLC控制设计
2.1 QD75P4N参数设置
1)目标盘JE 是轴1,传送带是轴2,轴1、轴2 每转的脉冲数和每转的移动量都设置为36 000 pulse。具体的每项参数设置情况如图4所示[6]。
2)目标盘JE 伺服驱动器需要更改配置,设置到位范围(指令脉冲单位)为100,每转指令输入脉冲数为36 000 pulse/rev,增益调整模式设置为自动调谐模式2,伺服环增益负载惯量比为35 倍。具体设置如图5所示。
3)流水线J4伺服驱动器也需要更改配置,与目标盘JE 伺服驱动器的设置一样,唯一需要更改的设置是自动调谐响应性,由14改为16。
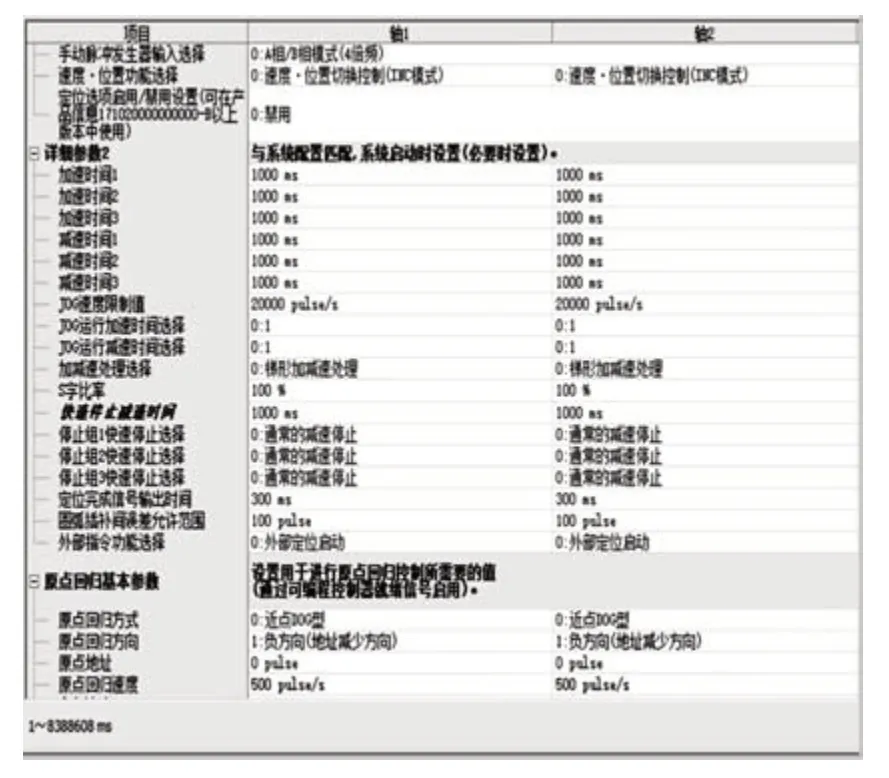
图4 QD75P4N轴1和轴2参数设置
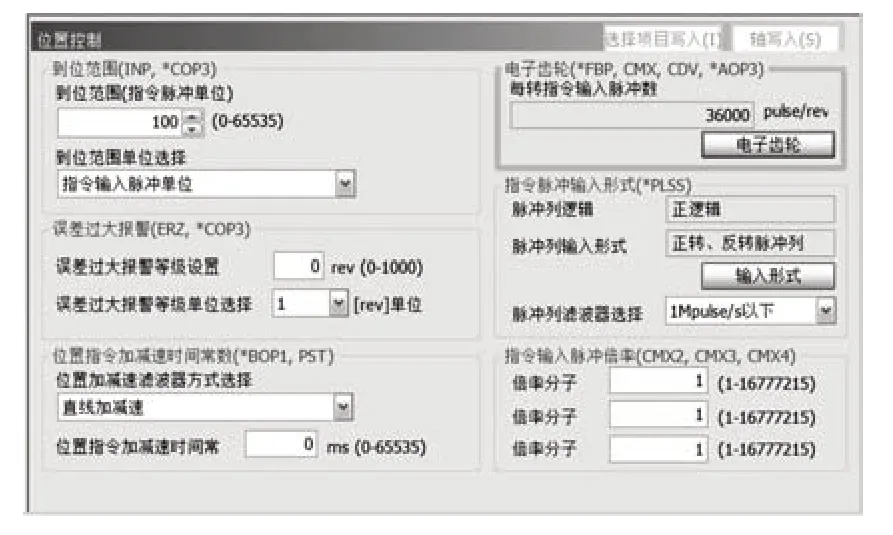
图5 目标盘JE伺服驱动器主要参数设置
2.2 PLC控制系统设计
根据该项目的设计要求,对PLC控制系统进行编程,系统I/O分配如表1、表2所示[7]。
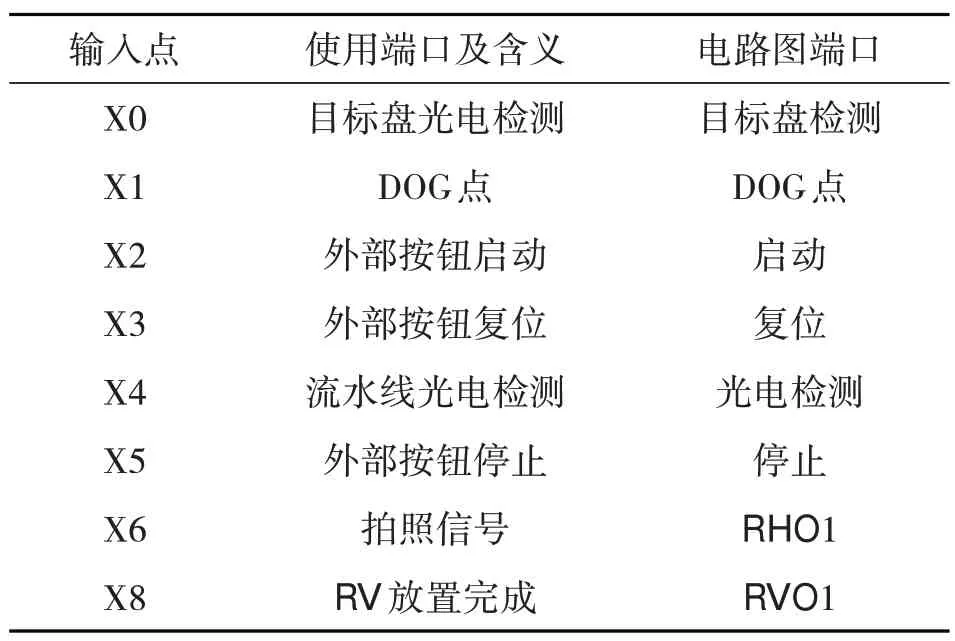
表1 PLC输入地址

表2 PLC输出地址
按照系统控制要求和继电器控制系统逻辑,给出部分PLC控制系统梯形图,如图6所示。
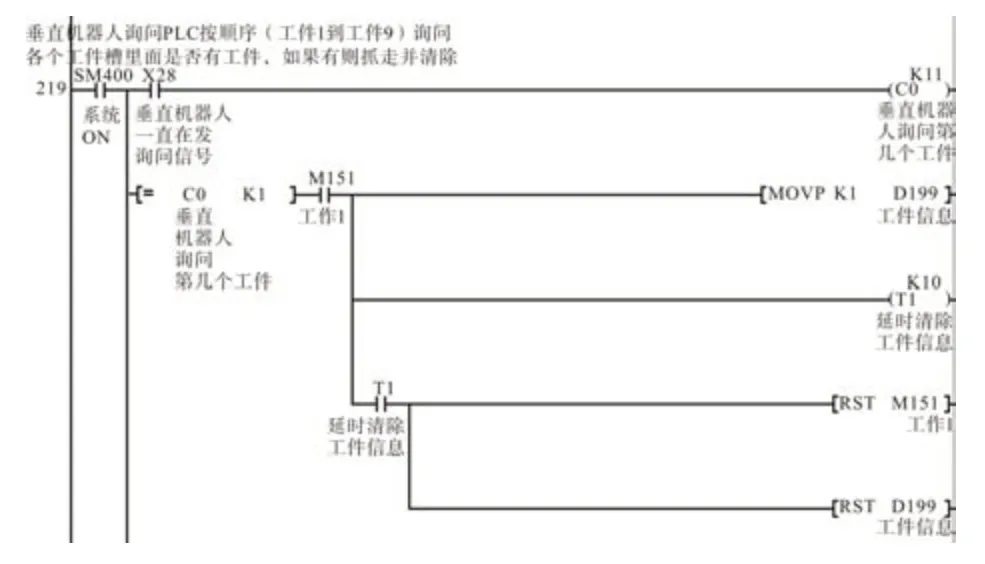
图6 部分PLC控制程序
3 调试中出现的问题
水平机器人与垂直机器人存在干涉区域的问题。水平机器人的放置工件区域与垂直机器人的抓取工件区域会有干涉,在水平机器人放置工件时垂直机器人不能抓取,或者在垂直机器人抓取工件时水平机器人不能放置,故将两个机器人都设置安全域。当每台机器人进入安全域时,各自会发出设定的安全域信号,并且该信号不经过PLC,两台机器人之间直接相连,都以高电平信号触发且保持。当水平机器人抓取工件准备放置时,先检测垂直机器人是否有安全域信号发出,如果有,则水平机器人在安全区域位置前等待垂直机器人离开安全域,附随的安全域信号消失;如果没有,则水平机器人进入安全域并且发出安全域信号,垂直机器人抓取工件时必须等待该信号消失后才能进入安全域抓取。
4 结语
组合机器人及视觉检测搬运控制系统实验平台融合了多方面的硬件及软件系统,有人机交互界面、PLC、通信系统、视觉检测等。在调试阶段出现了一些不足,各种插补指令不够精确,这些问题在后面的实验中会不断地优化调整。
