工业遥控器在全自动挖泥中的应用
2021-02-01贾振东周坤良
贾振东,周坤良
(中交疏浚技术装备国家工程研究中心有限公司,上海 201208)
1 引言
自航式耙吸挖泥船的疏浚作业是船舶航行和挖泥相结合的操作。在施工时,在驾驶室中需要船舶驾驶人员控制挖泥船的航行姿态和疏浚装载情况,同时还需要决定何时开始或者结束挖泥作业,并发出一系列航行及疏浚指令,负责挖泥操作的施工人员再根据这些指令进行相应的操作。由于船员间经常因不默契或其他原因误解对方的施工思路,影响施工效率,严重时会造成船舶安全事故。为了提高施工效率、减少安全事故发生,我们提出了全自动挖泥系统。全自动挖泥系统可以使驾驶人员将主要专注于船舶航行,只在疏浚作业开始时或需要干预时,按下控制台上的宏按钮,这些宏按钮替代了过去的疏浚指令,而具体的挖泥操作则交由全自动化疏浚系统去实施。
在挖泥船施工时,工况复杂多变,通常情况下,驾驶员在驾驶室中操作台上进行操作疏浚指令,负责挖泥操作的施工人员可以在现场根据指令在现场控制箱上直接操作,有时候,也是驾驶员在操作台上直接遥控操作。使用手持式遥控器,不但在施工时方便施工人员操作,而且也避免了一定的危险因素。
2 遥控器系统的制定
遥控器系统的主要是基于耙吸挖泥船全自动挖泥控制系统,实现耙吸挖泥船全自动挖泥的无线控制。
2.1 功能需求分析
根据工业遥控器行业标准及用户需求,分析如下:
(1)系统构成。遥控器系统包括发射系统和接收系统,即发射器和接收器。发射器由操作人员手持操控,接收器安装在挖泥船的疏浚台中。
(2)功能性。功能性是遥控器系统重中之重。遥控器系统的功能是基于耙吸挖泥船全自动挖泥控制系统来实现的。
(3)可靠性。遥控器系统可靠性设计是遥控器系统最重要的环节之一。系统使用双CPU 双解码器对无线数据进行实时通讯,实时解析。
(4)安全性。在施工过程中,难免出现一些人为或者非人为的失控情况,遥控器系统设置了主动急停和被动急停功能。同时,系统还含自动电源切断和电池低电压检测功能。
(5)操作性。发射器操作面板的设计应该操作方便、简易,方便操作人员使用。
(6)显示屏界面。使用LCD 屏实时显示操作信息。
(7)供电。发射器供电系统采用5 号AA 可充电电池供电。接收系统电源由疏浚台DC24V 供电。
(8)外壳。施工现场环境复杂,遥控器外壳的外壳防护等级为IP65。
2.2 系统总体方案
根据遥控器系统的功能需求分析,遥控器系统由发射器和接收器组成。发射器和接收器之间通过发射模块和天线进行无线通信。发射器由操作人员进行控制,向接收器发送控制指令,接收器接收到指令后,通过Profibusdp 接口,传输给全自动挖泥控制系统。全自动挖泥控制系统将耙管、耙头等设备的状态反馈给接收器,接收器通过射频模块发送给发射器,通过LCD 显示屏,将耙管、耙头等设备的状态反馈显示出来。
2.3 全自动挖泥控制系统
全自动挖泥控制系统对耙吸挖泥船的挖泥过程进行了自动化设计,将实现全自动挖泥技术。该技术以“一人桥楼+宏按钮”的设计理念,在保障设备安全的前提下,实现挖泥疏浚作业模式的全自动控制。
在全自动挖泥系统控制对象包括:A 字架及耙管、疏浚闸阀及冲洗系统、高压冲水蝶阀、液压系统、泥泵及封水系统和溢流筒。耙管在挖泥过程中,按照位置可以划分为耙管位于搁墩处,耙管离开搁墩、未到耙管水平且弯管至吸口处,耙管水平且弯管至吸口处、耙管水平且弯管至吸口处,耙管水平且弯管至吸口处与耙头着地之间和耙头着地5 个阶段,其他设备的动作均按照耙管位置的变化而触发或停止。
全自动挖泥控制可以通过一个“自动挖泥”总宏按钮完成挖泥过程的准备、施工和结束三个过程,同时,为了操作的灵活性,设置了“挖泥准备”“放耙”“收耙”和“停止”四个操作宏按钮完成整个挖泥过程。
3 遥控器系统的功能应用
3.1 遥控器系统的结构
遥控器系统由发射器和接收器组成。
(1)发射器
发射器尺寸为21.5cm×5.6cm×3.7cm,重量为210 克(不含电池)。使用4 节五号AA 电池供电,这样发射器能更方便的携带。发射器防护等级IP56。发射器的调制方式是GFSK,在挖泥船作业中能好的对信号频谱进行调制。发射器的有效工作距离为100 米,在挖泥船作业中有足够的距离进行操作。发射器有1 块显示屏、12 个按键。
发射器面板分两个区域,分别是按钮区域和显示屏区域。
所述的按钮区域又分为主按钮区域和辅按钮区域。主按钮区域有“准备”“自动”“放耙”“起耙”“暂停”“应急”6 个按钮,这6 个按钮全部为点动输出。辅按钮区域有2 个“备用”、1 个“复位”、1 个“调频”、1 个“ON”和1 个“OFF”按钮。其中,“备用”和“复位”按钮是点动输出,“调频”按钮是具有调频功能的按钮,“ON”和“OFF”是开关机功能按钮。
所述的显示屏区域有LCD 显示功能。LCD 主界面分为上、下半部分。上半部分为遥控器预留区域,显示遥控器状态、信号、频道等信息。下半部分为自定义区域,分为两行。第一行为当前按钮状态,显示当前操作按钮的4 个状态反馈信息。这4 个状态反馈是“READY”“DOING”“OK”“FAULT”。第二行为耙管状态,显示耙管位置信息7 个状态反馈。这7 个状态反馈是“搁墩”“推出”“三管平”“放耙”“着地”“起耙”“收进”。
本文遥控器系统的发射器如图1 所示。
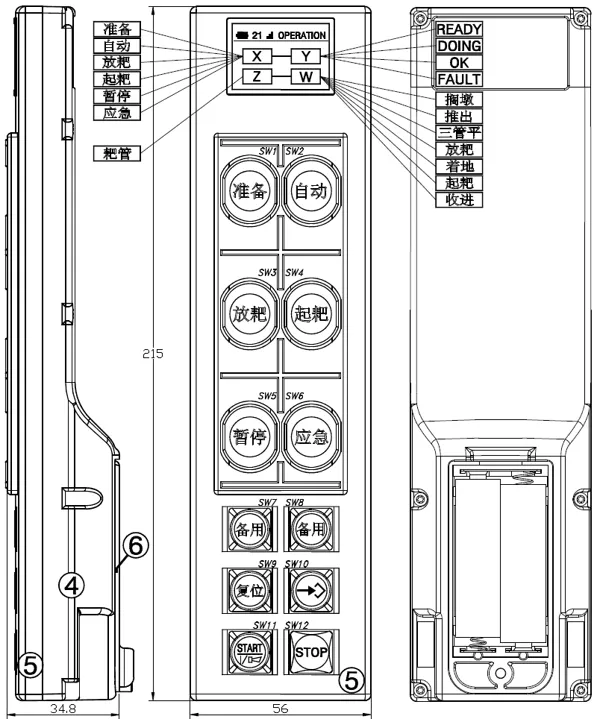
图1 发射器外形图、面板结构图
(2)接收器
接收器的端口为profibus-DP 接口。profibus-DP接口反馈信号清单如下:
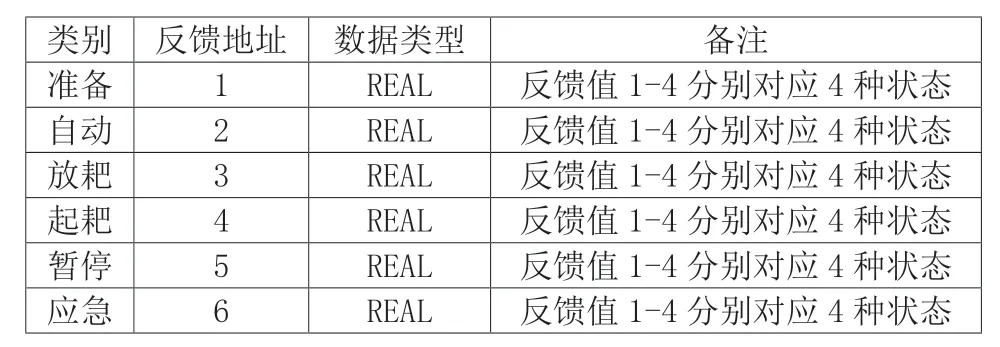
表1 profibus-DP 接口反馈信号清单
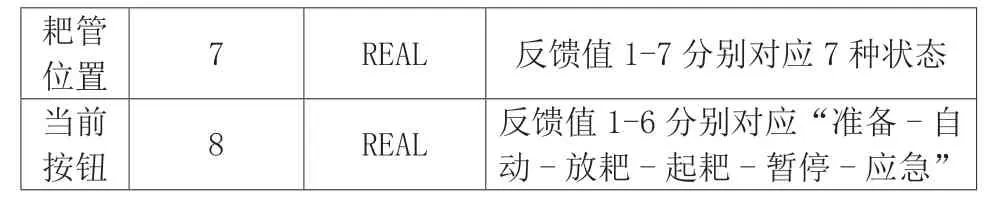
耙管位置 7 REAL 反馈值1-7 分别对应7 种状态按钮 8 REAL 反馈值1-6 分别对应“准备-自动-放耙-起耙-暂停-应急”当前
3.2 遥控器系统功能应用
发射器的“准备”按钮按下后,系统将做自检和准备工作,同时,显示屏上半部分显示“准备-READY”。准备工作主要完成启动液压泵,封水泵和冲洗泵,闸阀根据参数设置预置为单耙旁通或双耙旁通模式,蝶阀根据参数设置预置为串联冲耙头或单泵冲耙头或全部关闭模式。
当耙管放置在搁墩上时,发射器的显示屏下半部分显示“耙管-搁墩”。此时,按下“放耙”按钮时,显示屏上半部分显示“放耙-DOING”,显示屏下半部分显示“耙管-放耙”。第一步,耙管将从搁墩处上升至舷内最高位置,此时,显示屏下半部分显示“耙管-推出”。第二步,耙管从舷内最高位置推至舷外最高位置。第三步,耙管从舷外最高位置按照耙管入水姿态下放到弯管吸口到位且三管水平处停止,此时,显示屏下半部分显示“耙管-三管平”。当耙管处于弯管吸口到位且三管水平位置,再按下“放耙”按钮,将根据设置的参数启动泥泵和高压冲水泵,同时,调用STAWC 控制器,ALDC 控制器,ALMO 控制器,ADHC 控制器和APC 控制器,各控制器根据各自的启动条件开始动作。
当耙管处于水下挖泥时,按下“起耙”按钮,显示屏上半部分显示“起耙-DOING”,显示屏下半部分显示“耙管-起耙”,耙管将开始上升,停止STAWC 控制器,ALDC 控制器,ADHC 控制器和APC 控制器。根据设置参数当上升至一定高度或三管水平位置时,自动停止泥泵和高压冲水泵,停止ALMO 控制器,然后,耙管将继续上升直至到耙管放至搁墩处。在此过程中,显示屏下半部分依次显示耙管-三管平”“耙管-搁墩”。当耙管处于上升或下降状态时,按下“暂停”按钮,耙管将停止动作,只有再次按下“起耙”或“放耙”按钮时,耙管才继续动作。
4 结语
本文设计的遥控器具有操作简易、携带方便、功能性高、可靠性强。操作人员使用遥控器在船舶驾驶室的任意位置进行全自动挖泥疏浚作业,真正实现了“一人桥楼+宏按钮”的设计理念,减少了人工成本,将大大地降低人为操作失误的风险。