外骨骼型下肢康复机器人柔性关节驱动器的设计及实验研究
2021-02-01王援柱徐飞佀国宁
王援柱 徐飞 佀国宁
0 引言
人口老龄化已经成为我国重要的社会问题。老年人面临很多疾病的威胁,其中,脑卒中是最常见的疾病之一,往往伴随着患者半侧肢体障碍、肢体麻木、失语以及偏瘫等众多的后遗症,绝大部分的病患甚至会因偏瘫造成残疾。外骨骼型下肢康复机器人有助于帮助患者进行合理有效的康复训练,提高瘫痪肢体的运动功能[1]。
传统的外骨骼型下肢康复机器人采用刚性机构驱动关节时,往往无法有效缓解外部冲击进而容易因外部冲击对患者关节造成损伤[2]。与刚性驱动相比,液压驱动[3-4]、气压驱动[5-7]和弹性驱动[8-9]三种驱动方式均能减小冲击产生的反作用力,提高康复训练效果,其中,弹性驱动通过机械方式进行传动,其精确性更高,响应速度更快。
对于有较好对抗冲击性能的弹性驱动设计,目前康复训练中常采用单一弹簧或者力/位混合控制、阻抗控制、神经网络等控制策略进行运动控制,其中单一弹簧在驱动力较大时,弹簧全部被压缩,无法实现弹性驱动;上述控制策略分别存在建模复杂、需要安装大量传感器、隶属度函数比重选取没有理论依据等缺点。因此,本文设计了一种含弹簧和扭簧的双向控制关节柔性驱动器,依据不同的运动状态,弹簧和扭簧分别发生作用,达到实现柔性变刚度驱动的目的。
1 柔性关节驱动器结构设计
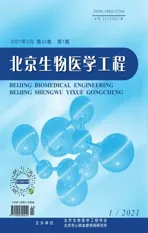
柔性关节驱动器采用集成电机驱动系统,将两组相同劲度系数的弹簧和扭簧、联轴器、光电编码器、电机、角度编码器、动态扭矩传感器组装在一起,通过调整电机的转速实现弹簧、扭簧的压缩以及正反向的运动。其结构如图1所示。
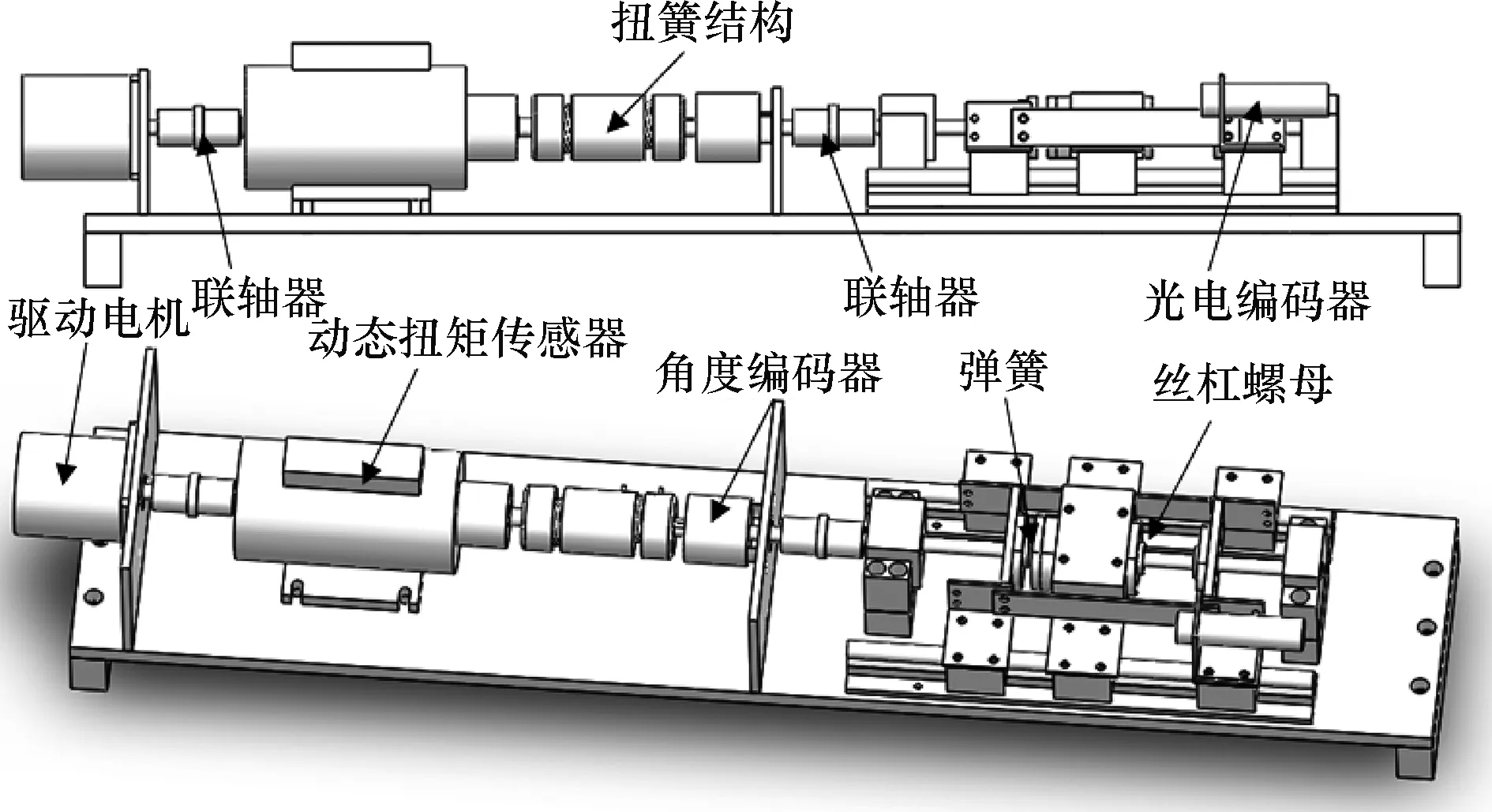
图1 柔性驱动器结构
2 膝关节参数
设计的柔性驱动器用于本课题组的外骨骼型下肢康复机器人的膝关节驱动。外骨骼型下肢康复机器结构如图2所示。驱动器分别安装在膝关节侧面,与下肢康复机器人的连接方式如图3所示,驱动器一端与连接部件固结在一起,另一端与力作用板连接,通过驱动力作用板的运动,实现关节的转动。
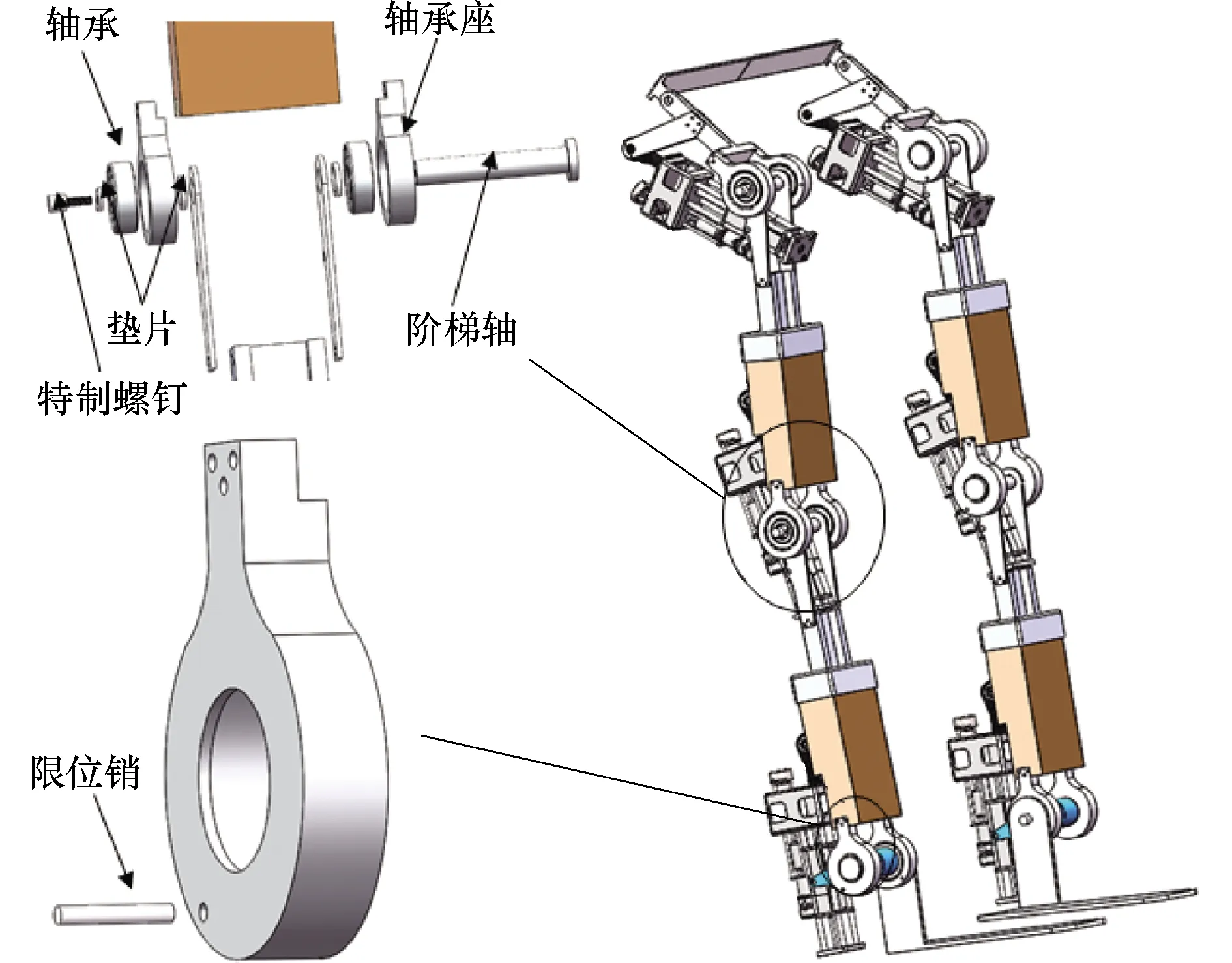
图2 外骨骼型下肢康复机器人结构
图3 驱动器与机器人连接部件
根据GB 10000—1988[10]《中国成年人人体尺寸》,为满足大多数人的使用标准选取18~60岁95%的人的标准体质量作为设计体质量,即75 kg,单侧小腿的质量占人体总质量的4.4%;选取6061铝合金材料,外骨骼的体积和质量计算公式为:
V=LWD
(1)
式中:L为长度;W为宽度;D为高度。
M=ρV
(2)
式中:ρ为密度;V为体积。
单侧小腿的质量占人体总质量的4.4%,即3.31 kg。由式(1)、式(2)可得外骨骼(包括连接片)体积为886 cm3、质量为2.57 kg。考虑到绑带等额外质量M,取绑带0.5 kg,则所需平衡的总质量为:
M总=M人体+M+M绑带=7.51 kg
(3)
取力臂长度1/2 小腿处为200 mm,膝关节曲伸扭矩为:
T膝曲/伸=FL=14.7 N·m
(4)
图4为髋膝关节连接片结构,其中驱动模块与膝关节距离为L1。根据精度要求,选用BSX 精度等级C3 滚珠丝杠,其导程为4 mm、行程为150 mm、丝杠轴径8 mm。正常人行走大约1.5步/s,康复训练先假定为1步/s。膝关节曲伸的运动范围确定为-120°~0°,即转速范围为0~20 r/min。
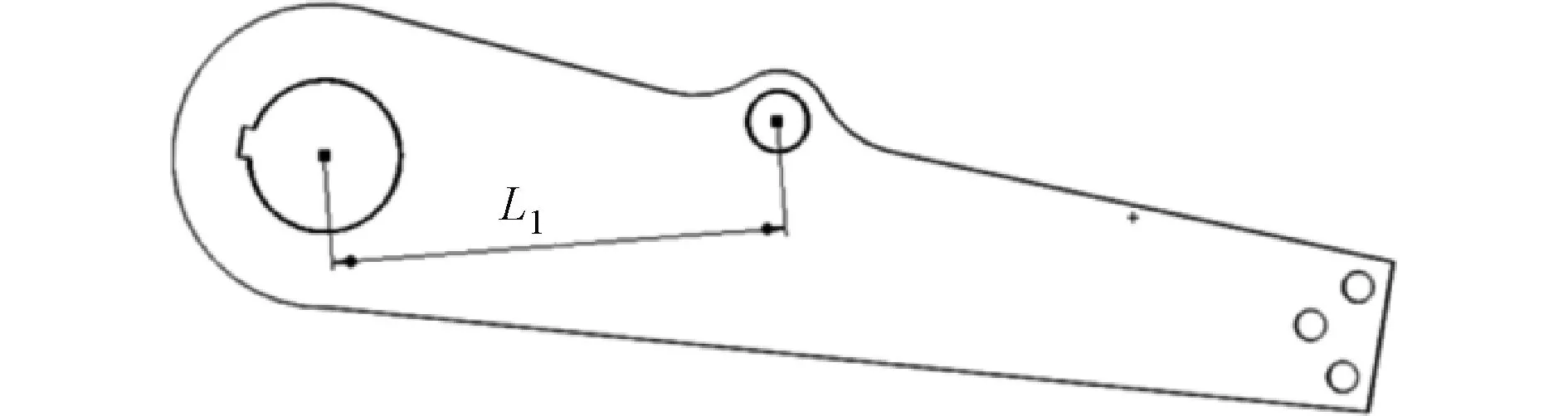
图4 髋、膝关节连接片
3 膝关节屈伸运动
在运动过程中,膝关节设计运动范围起始角度设置为-120°,位移角度为-120°,频率为0.25Hz,其运动状态如图5所示。
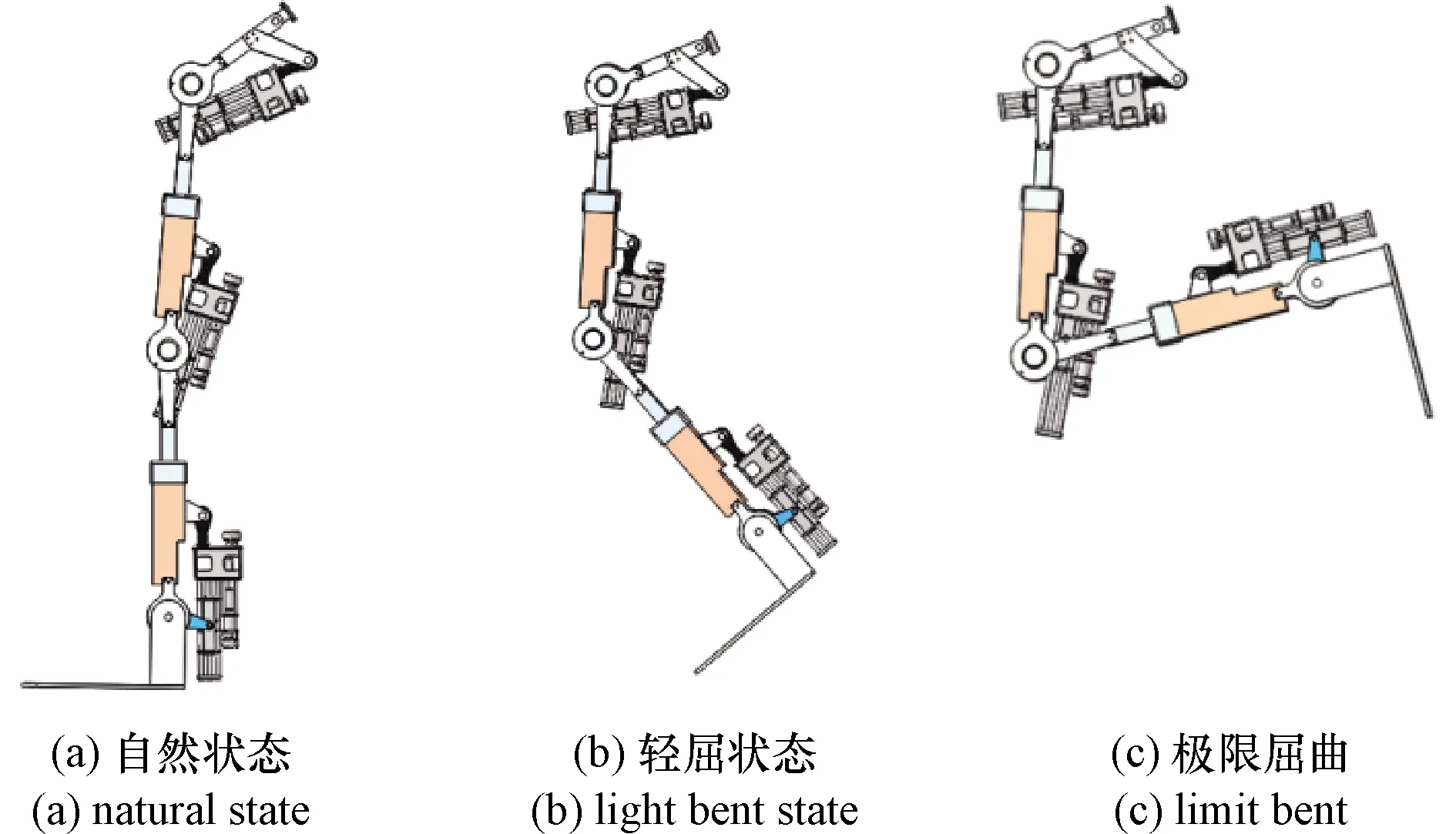
图5 膝关节运动状态
为了验证膝关节结构设计的合理性,根据临床步态分析(clinical gait analysis,CGA)数据库提供的行走步态数据,将一个步态周期膝关节动作对应的关节角度随时间的变化参数设定在Solidworks软件的Motion仿真分析模块中,并进行运动学仿真,其位移曲线如图6所示。
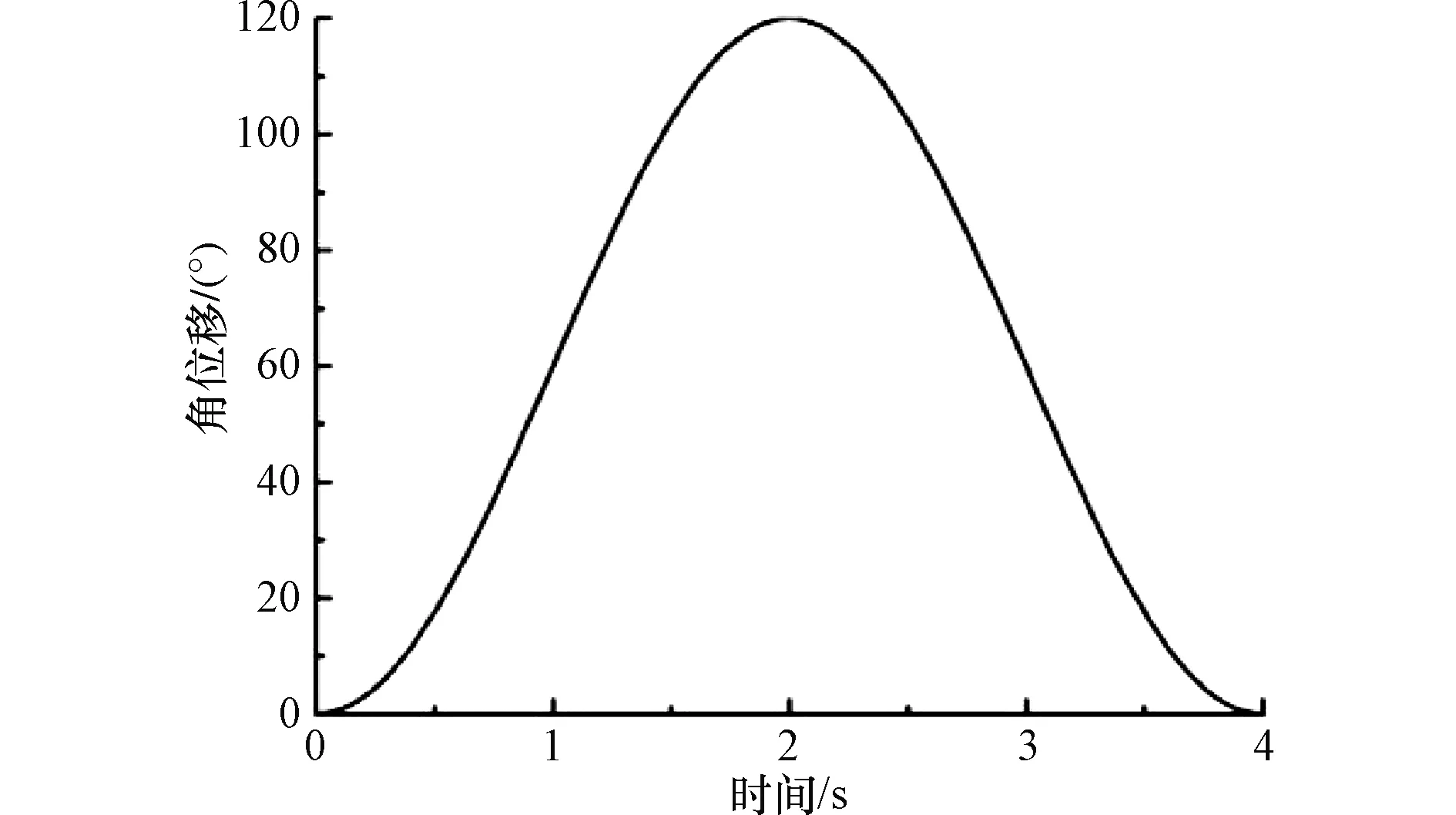
图6 膝关节角位移曲线
由图6可知,膝关节屈/伸的角位移均没有产生较大的振动或突变且连续,说明膝关节屈伸运动过程平稳,膝关节结构设计合理。
4 弹簧及扭簧参数确定
柔性驱动器和膝关节的连接可简化为曲柄-滑块连杆机构,如图7所示。当θk=0时,曲柄夹角为θ2,0。
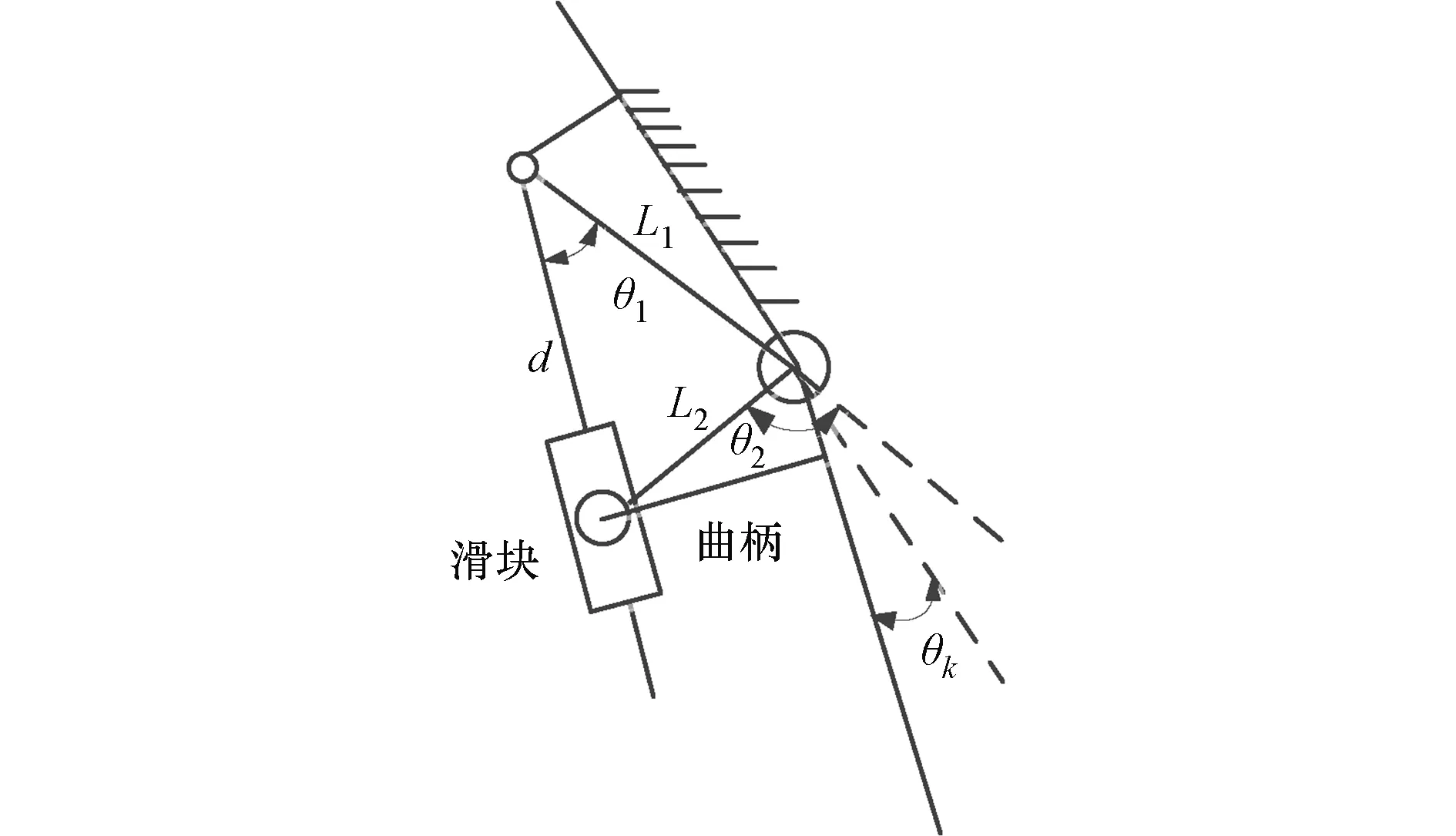
图7 膝关节简化图
根据图7所示的四杆机构的尺寸关系,可得:
dcosθ1=L1+L2cosθ2
(5)
dsinθ1=L2sinθ2
(6)
柔性驱动器产生的扭矩为:
M=FL2sin(θ2-θ1)
(7)
几何约束如下:
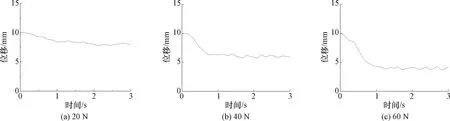
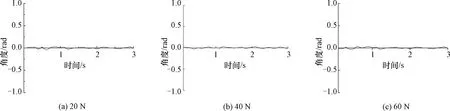
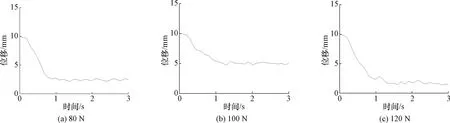
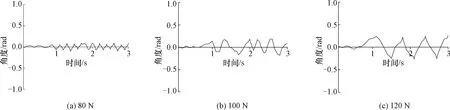
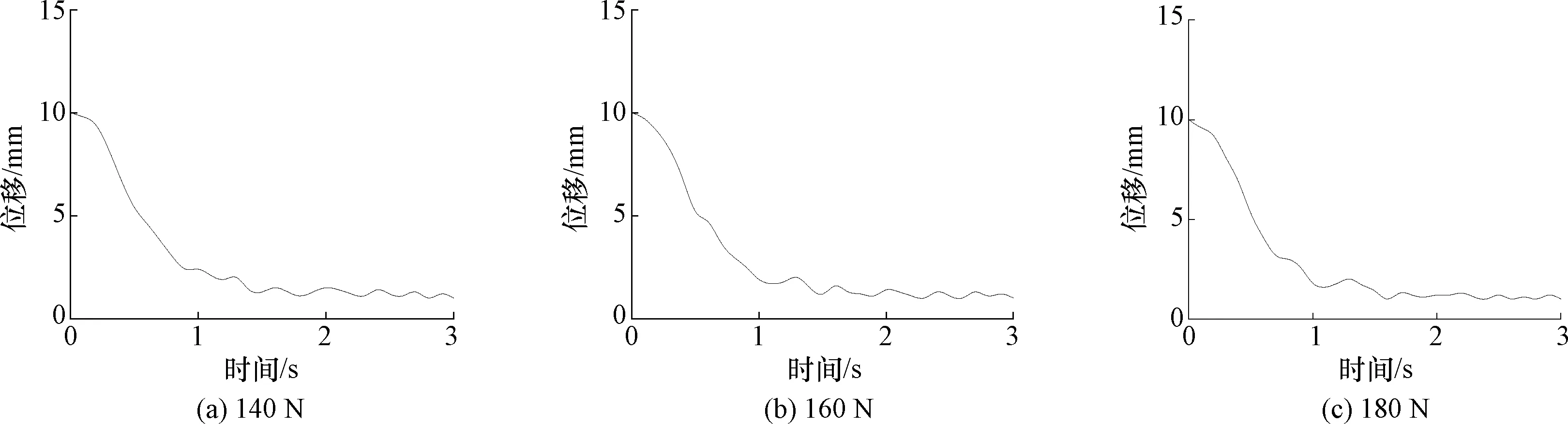
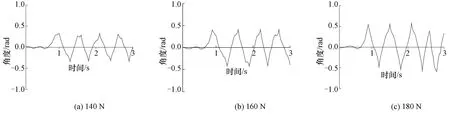
dmax (8) L1-L2 (9) L2 (10) θmin<θ2-θ2,0<θmax (11) 对连杆机构进行优化,得到膝关节结构参数,如表1所示。 表1 膝关节结构参数 在步态周期的多数时间内,所需的力为峰值力的30%,选取低力范围为小于100 N,选取弹簧的刚度为10 N/mm;根据峰值扭矩,选择扭簧抗扭刚度为0.1 N·m/rad。 搭建的柔性驱动器实验平台如图8所示。 在图8所示的柔性变刚度驱动器实验平台上开展变刚度驱动关节实验研究。分别选用低力模式、中力模式、高力模式模拟关节的驱动,验证不同模式下弹簧和扭簧的工作状态,得到驱动器的刚度变化顾虑。低力模式下,弹簧产生压缩产生作用,扭簧基本不发生形变;中力模式下,弹簧与扭簧均被压缩,共同发生作用;高力模式下,弹簧完全压缩,仅扭簧继续压缩发生作用。 图8 柔性驱动器实验平台 分别对电机转速进行调节以改变转矩,所选电机的功率为50 W,电机轴径为6 mm,由电机的扭矩公式得到输入力与转速的关系为: (12) 5.3.1 低力模式 当给电机输入转速分别为8000、4000、2667 r/min,即输入力分别为20、40、60 N时,弹簧位移与扭簧角度变化如图9所示。 从图9可以看出,当驱动力较小时,且从20 N增大为60 N时,弹簧的压缩值变化较大,从0变为6.3 mm,随着驱动力的增大,位移的变化速率变小。从图10可以看出,当驱动力较小时,扭簧扭转角度变化较小。 图9 低驱动力下的弹簧压缩位移变化 图10 低驱动力下的扭簧扭转角度变化 5.3.2 中力模式 当给电机输入转速分别为2000、1600、1333 r/min,即输入力分别为80、100、120 N时,弹簧压缩位移与扭簧扭转角度变化如图11所示。 从图11可以看出,当驱动力逐渐增大时,弹簧的压缩位移逐渐变大,从0增加到8.6 mm,随着驱动力的增加,位移变化率变小。从图12可以看出,随着驱动力的变大,扭簧的扭转角度逐渐变大,从0增加到0.26 rad,表明随着驱动力的增加,扭簧逐渐发生作用。 图11 中驱动力下的弹簧压缩位移变化 图12 中驱动力下的扭簧扭转角度变化 5.3.3 高力模式 当给电机输入转速分别为1143、1000、889 r/min,即输入力分别为140、160、180 N时,弹簧压缩位移与扭簧扭转角度变化如图13所示。 从图13和图14可以看出,当驱动力较大,且从140 N逐渐增加到180 N时,弹簧处于完全压缩的状态,对关节的驱动不起作用;扭簧发生扭转时,扭转角度从0增加0.59 rad,对关节的驱动起主要作用, 图13 高驱动力下的弹簧压缩位移变化 图14 不同驱动力下的扭簧扭转角度变化 本文设计了一种新型的弹簧和扭簧组合的柔性变刚度关节驱动器,搭建了柔性变刚度关节驱动器的实验平台,通过实验验证了该驱动器能够较好地实现变刚度的驱动。 当驱动力处于低力范围时,弹簧发生压缩,扭簧不发生作用,该状态下,扭簧可看作一根传动轴,实现关节的驱动;当驱动力处于中力范围时,弹簧扭簧皆发生作用,分别实现压缩和扭转,共同实现关节的驱动;当驱动力处于高力范围时,弹簧处于完全压缩状态,扭簧发生扭转变形实现关节的驱动。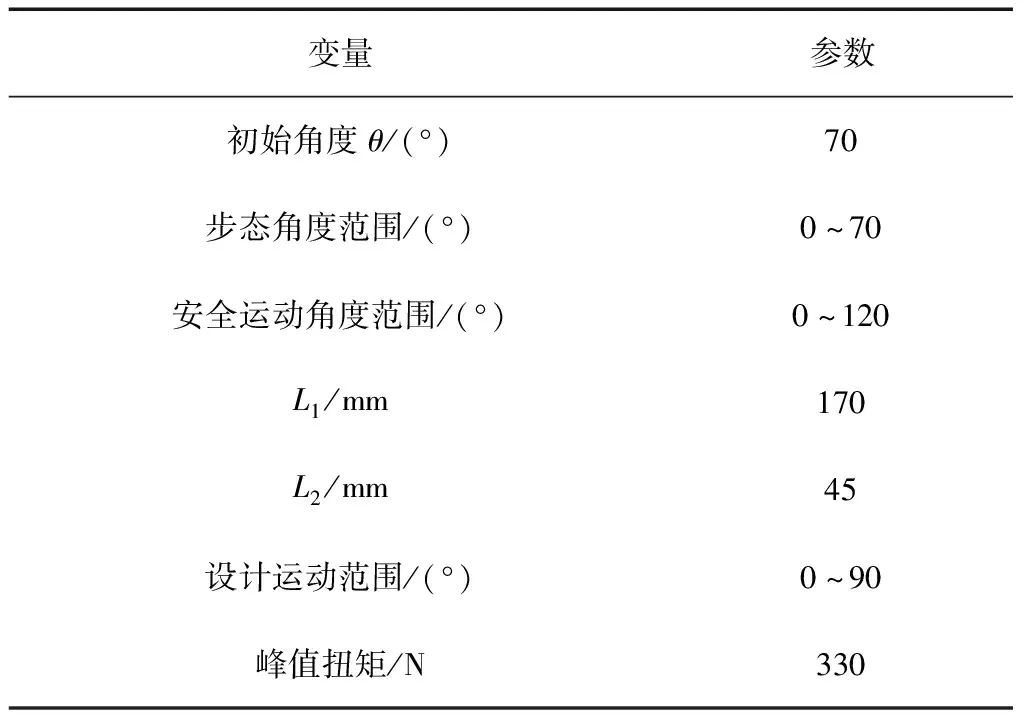
5 实验研究
5.1 柔性驱动器实验平台
5.2 实验过程

5.3 结果分析
6 结论