霍尔开关在换挡器中的应用
2021-01-31桑任仲蔡艳波马世玺王一婷
桑任仲,蔡艳波,马世玺,王一婷
(东风汽车集团股份有限公司技术中心电子电器部,湖北 武汉 430058)
1 概述
目前在各种换挡器中,小汽车上的自动挡一般只有P、R、N、D这4个位置信号,或者是P、R、N、D、+、-这6个位置信号。手动挡上位置根据变速器的挡位数决定,多数为1、2、3、4、5、N、R这7个位置,并且是双排或者三排排列。但是在一些大型的商用车和货车上面,换挡器很多是单排排列的,而且挡位最多的操作杆位置有1、2、3、4、5、6、7、N、R1、R2等超过10个位置。在这样的条件下,每个挡位之间的距离很近,各个位置的信号相互干扰的可能性就很大了。
目前换挡器操作杆位置信号的采集,绝大部分采用磁信号的方式采集操作杆的位置信号,具体为:在操作杆上的某个位置加上磁铁,当操作杆移动到某个位置,就会触发相应位置的传感器,从而换挡器的ECU就能读到当前的传感器状态,得到操作杆当前的位置。
2 霍尔开关的原理
2.1 霍尔效应
霍尔效应从本质上讲是运动的带电粒子在磁场中受洛仑兹力作用引起的偏转。当带电粒子 (电子或空穴) 被约束在固体材料中,这种偏转就导致在垂直电流和磁场的方向上产生正负电荷的聚积,从而形成附加的横向电场。
2.2 霍尔开关
根据霍尔效应制作成的传感器叫做霍尔传感器,霍尔传感器分为线型霍尔传感器和开关型霍尔传感器两种。其中本课题中采用的是开关型霍尔传感器来进行电路设计,通常也称为霍尔开关。
如图1所示,其中Bnp为工作点“开”的磁感应强度,BRP为释放点“关”的磁感应强度。当外加的磁感应强度超过动作点Bnp时,传感器输出低电平,当磁感应强度降到动作点Bnp以下时,传感器输出电平不变,一直要降到释放点BRP时,传感器才由低电平跃变为高电平。Bnp与BRP之间的滞后使开关动作更为可靠。
2.3 霍尔开关的选型
霍尔的特性可以分为双极性、单极性、线性、全极性4种。
1) 双极性:感应南北磁场的变化,通常南 (S) 极感应,霍尔输出低电平,直到北极 (N) 靠近,芯片输出状态翻转为高电平,如此往复。
2) 单极性:只感应单向磁场,通常南 (S) 极靠近时输出低电平,当南 (S) 极离开时,芯片输出状态翻转为高电平,北 (N) 极感应始终是输出高电平。
3) 线性:芯片的输出电压与磁场强度成正比,根据感应到的磁场极性和强度,芯片输出电压上升或下降。
4) 全极性:感应南 (S) 北 (N) 磁场的变化,在南(S) 磁场和北 (N) 磁场下均感应输出高低电平变化信号。
根据挡位的设计需求,选用了HAL543单极性高灵敏度的霍尔开关,它的工作电压在3~30V,磁场Bnp和BRP分别为120G和60G,工作的温度-40~150℃,它由反向电压保护、电压调整器、霍尔电压发生器、信号放大器、史密特触发器和集电极开路的输出级组成。
3 永磁铁的磁场强度
对一个永磁铁的磁感应强度,它的两端的磁场强度最大,但是轴线上移动的话,距离越远,磁场强度越小,具体的磁场强度的变化满足如下公式:

式中:L——圆柱体高度;x——轴心线上距离。
从公式 (1) 中可以得出,磁场强度会随着距离增加而迅速降低,要触发霍尔开关Bnp就必须要在一定范围内,不能太远,但是太近也会造成其他挡位的霍尔开发被触发,或者在离开这个挡位时,磁场强度不能低于BRP而关闭不了此霍尔开关。因此在霍尔开关与磁铁的距离是设计中重点考虑的一项。
4 挡位采集的设计
4.1 电路设计
在换挡器中,挡位的信号是最重要的,将挡位信号的采集放在优先级最高,只要信号发生变化,就直接进行处理,以确保挡位的信息能及时传递进来。所以在电路设计时将这些霍尔开关的信号接入单片机的中断口,以便软件能进行中断响应。
电路板PCB设计一般依据于机械结构的设计,一个机械设计的模块定下来之后,整个操作杆的移动范围就定下来了。每个挡位操作杆停的位置也定下来后,在电路板布置的时候,需要将每个霍尔开关与每个操作杆停止的位置一致,在垂直方向上,操作杆上磁铁的位置和霍尔开关是重合的,这样才能保证磁场强度足够大,触发相应的霍尔开关。
4.2 软件设计
先在底层的程序中,将霍尔开关的接入口定义成中断接口,在设计中断类型的时候将它们设置成下降沿触发,即只要有霍尔开关是从关信号变成开信号就会触发中断程序,当进入中断程序再进行程序的判断,具体的算法如图2所示。
5 挡位丢失
5.1 故障现象
一款多挡位信号的手动换挡器在产品验收的时候,发现某个挡位信号无法读取,即当操作杆移动至某个位置的时候,发出来的信号没有变化。
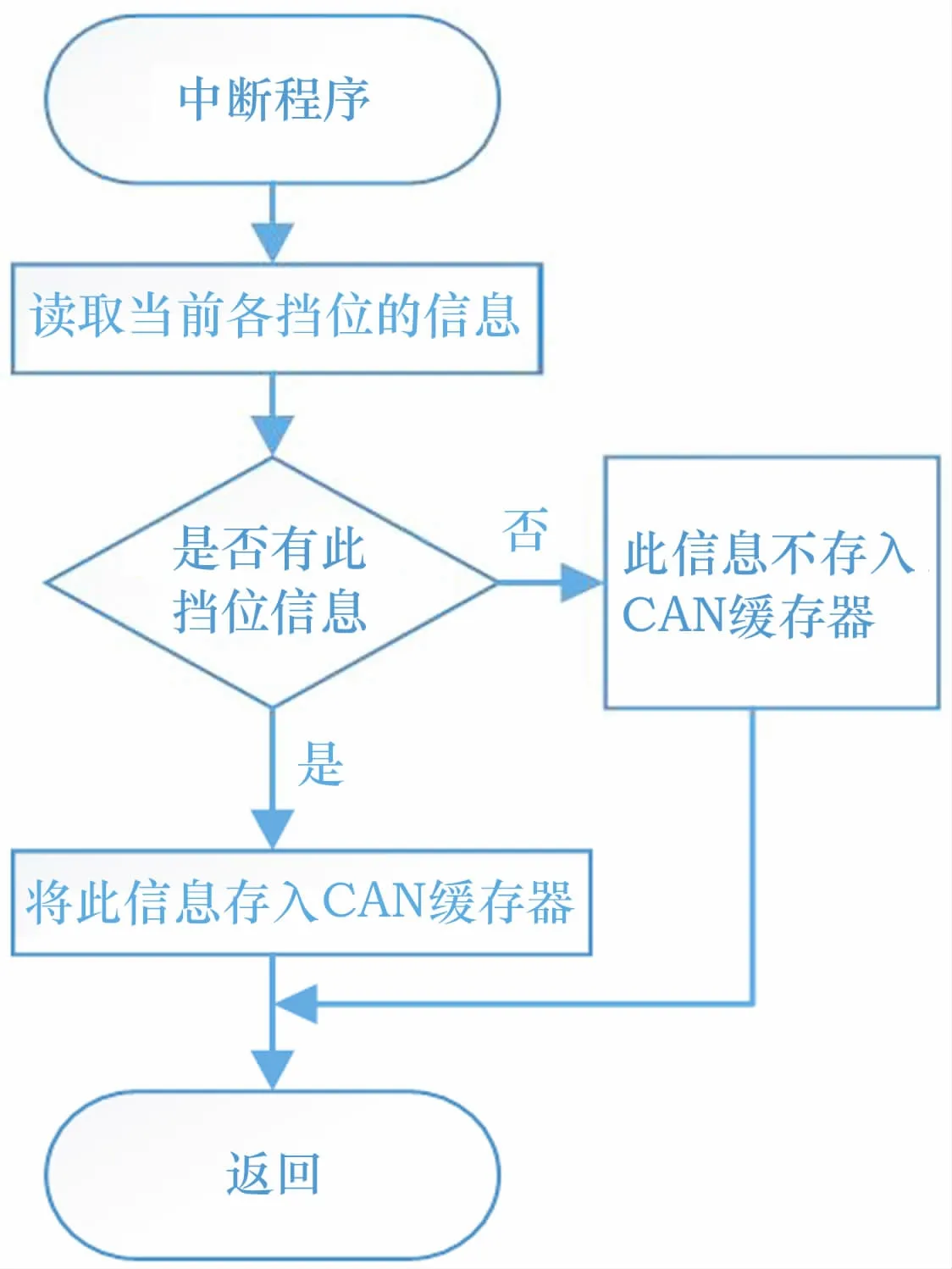
图2 挡位信号采集的软件流程图
5.2 故障排查
通过软件排查时,发现程序虽然进入了中断程序但是进入逻辑判断语句后就直接跳出了,说明程序在逻辑判断时没有找到相应的程序入口,它就直接跳出了,致使数据没有存入CAN缓存区,导致换挡器发出的信息也就不会变化。
用示波器对霍尔开关的输出信号进行检测时,换挡器操作杆移动这个发出信号的位置再移回来,示波器抓到的波形如图3所示,在示波器的绿色波形进入下降沿的时候,表示这时该位置霍尔开关已经开启,但是此时的黄色波形还是低电平,说明它对应的霍尔开关还没有关闭,此时采集进来的霍尔开关信号有2个起作用,所以程序进入中断程序后找不到对应的挡位信息,挡位信息不能进入CAN的数据缓存器;相反后面黄色波形进入下降沿的时候,绿色已经变成高电平了,所以这时程序进入中断程序,采集到的信息就有对应的挡位信息,即可将此信号存入CAN缓存器。

图3 采集到的霍尔开关信号波形
5.3 问题产生的原因
由于此换挡器是一个多挡位的手动换挡器,有1、2、3、4、5、6、7、8、N、R1、R2共11个挡位,而且操作杆的设计运行轨迹也是在一个平面内,造成了操作杆停留的位置也很多,对应的霍尔开关在电路板的布置比较紧密;再加之有些器件存在个体性差异和器件安装时存在着一定的安装误差,从而造成了某些霍尔开关之间的距离较近,当操作杆上的磁铁在某个挡位时,触发了一个霍尔开启,但另一个开关却还没有关闭的现象。
由于之前的程序设计时,为快速响应挡位信息的采集,采用了中断处理程序,在程序进入中断时,直接采集挡位信息,此时读到的是2个霍尔开关同时开启的信息,由于不能有2个挡位信息同时出现的工况,所以判断这次读取到的挡位信息为无效值。程序只有每触发一次霍尔开关才会执行一次中断,当这次中断完毕后,没有新的触发信息,程序就不会再进入中断程序,即使后面出现了准确的挡位信息,由于进入不了中断程序导致后面的挡位信息无法读取到。
6 解决方案
由于换挡器操作杆的运动都需要一定的时间,从一个挡位到下一个挡位一般在200~300ms,所以进入中断后,针对这个程序进入读取不到有效挡位信息时,需要等到操作杆真正进入有效挡位信息,才能读取挡位信息。于是在软件的逻辑设计时,又重新设计了一套软件算法,即采用中断程序和循环扫描兼顾的方案,软件流程图如图4所示。
程序进入中断程序之后,就开始设置一个标志位,判断挡位已经发生变化了,再以50ms的周期进行程序扫描,来判断当前的挡位信息是否有效,当信息为有效值,才进行记录,并将此最新的挡位信息发送出去,将之前设计的标志位清零。这样既能保证对挡位信息的快速响应,也具有很强的纠错能力,能够过滤掉一些无用的挡位信息。
7 方案验证
按照上述方案进行整改后,之前有挡位丢失的换挡器已经没有再出现挡位丢失的现象,而且后续所有的换挡器也未再出现挡位丢失,说明整改方案的算法是准确的。