基于图像识别的四旋翼无人机空中投放系统设计*
2021-01-29翁发禄郭海长
刘 帅,翁发禄,郭海长,韦 辉
(江西理工大学,江西 赣州 341000)
1 引言
地震、火灾等自然灾害给人类的安全带来了巨大威胁,特别是灾害发生后交通中断给灾害救援及物资补给造成极大的困难。空中救援及物资投放具有方便快捷、不易受地形地貌影响等特点。在灾害发生后,通过空中投放实现急需物资补给可以为后续救援赢得时间,具有较强的现实意义。
四旋翼无人机具有操作方便、空中悬停、空间限制小等特点,进而在工业、农业及军事侦察等领域都有广泛应用。通过四旋翼无人机实现灾害环境下急需物资及药品等投放无疑具备较强实效性及可行性。但是,复杂灾害环境有可能造成无人机通信不畅,进而干扰物资投放控制,降低投放的准确性。通过图像识别实现无人机自主飞行及自主完成物资投放,可以大大提高救援效率,具有较高的研究价值。本文通过嵌入式系统开发实现对四旋翼的控制与自主飞行,并通过图像识别等技术手段完成物资投放任务,对于复杂环境下的救灾抢险具有一定的应用价值。
2 系统总体设计
系统包括物资投放控件设计、复杂环境下四旋翼无人机控制系统设计、无人机自主飞行及基于图像识别的物资投放设计。在物资投放控件设计中,物资投放脱钩控件的安全稳定运行关系到任务能否胜利完成。为了保证安全投放,在此采用双线圈驱动,实现脱钩动作的双保险。在四旋翼无人机控制系统设计中,考虑到灾害环境复杂,飞行干扰因素众多,将通过引入容错控制及鲁棒技术实现四旋翼无人机的抗风、抗振设计。在通信中断后,自动切换至自主飞行。在物资投放点选取中,考虑灾害环境下通信及视线受阻等情况,将通过视频图像处理,实现物资投放点的选取,完成投放。同时四旋翼无人机的控制还包括自动返航设计。在任务完成后,飞行器根据设定原点,实现自主返航。
3 硬件设计
四旋翼无人机的空中投放系统硬件如图1 所示。在通信允许范围内,计算机将控制信号发送给无人机,无人机将位置及状态信息反馈回计算机。当无人机飞出通信范围后切换至自主飞行状态,系统通过图像识别选择投放区,通过脱钩装置完成投放后,自主返回设定地点。

图1 四旋翼无人机的空中投放系统硬件示意图
为了提高系统的可靠性,增加了故障报警模块,主要包括电池电量预警、物质投放驱动系统预警、旋翼故障预警、航线偏离预警等。图像处理模块主要通过图像识别实现投放地点的选取,并发送信息给控制器实现飞行器的定点与物质投放。控制系统硬件结构如图2 所示。控制中心为STM32F407 芯片,外围电路主要有陀螺仪、磁力计、气压计、光流模块、摄像头组件、24C02、PWM I/O、LED 灯、稳压电源等。陀螺仪选用MPU-6050,其为全球首例整合性6 轴运动处理组件,相较于多组件方案,避免了组合陀螺仪与加速器时间轴之差的问题,减少了大量的封装空间。磁力计完成测量无人机与东南西北四个方向上的夹角,实现飞行方向固定。气压计通过检测大气压实现飞行器定高。光流模块主要实现飞行器稳定悬停。飞行器通过四路PWM 输出控制四路电调,进而控制四个电机的旋转,同时通过PWM 输入口接收遥控接收机信号。LED 实现系统状态显示。

图2 控制系统硬件结构
4 软件设计
软件设计主要包括四个部分:图像识别、飞行器飞行控制、通信、故障诊断。图像的识别流程如图3 所示。系统首先对拍摄得到的图像进行截取,然后进行图像预测理,包括图像去噪、图像卡尔曼滤波及图像灰度化处理。其次进行图像分析(主要包括子区域分割、阈值设定、特征分解及提取),进而搜索到最适合的投放区域,完成投放任务。
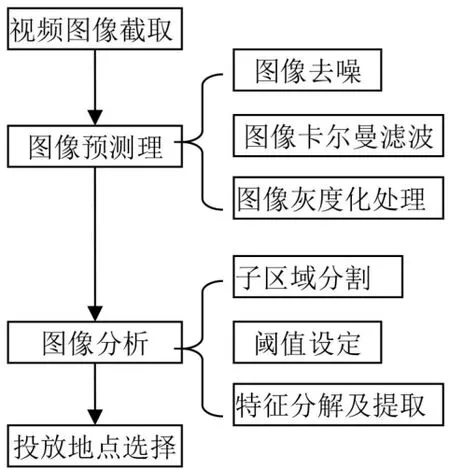
图3 图像识别流程总体框架
在通信通畅条件下,无人机可以通过计算机控制完成飞行任务。在通信中断后,无人机可以根据设定飞行范围自主飞行,完成相关任务。软件运行流程如图4 所示。
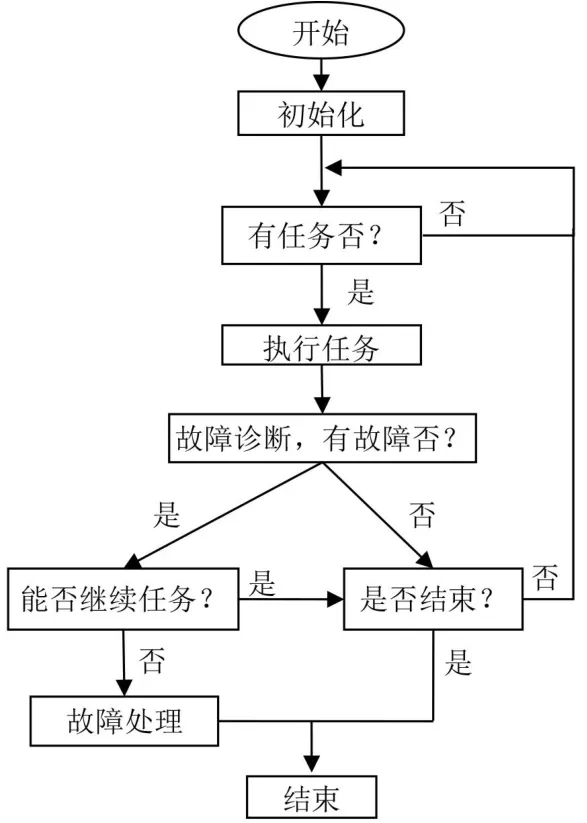
图4 软件运行流程
系统上电后先进行初始化,主要包括LED 灯、I/O 口及参数等的初始化,部分初始化程序如下:
LED_Init();//led 初始化
USB_HID_Init();/初始化USB
Param_Read();//参数初始化
My_SPI_Init();//初始化SPI
pwm_o_init();//PWM 输出初始化
pid_init();//pid 参数初始化
......................
初始化结束后,系统处于待机状态,循环查询外部任务输入,当有外部任务输入时,系统转入执行相关任务。任务结束后,执行一次故障诊断。当系统出现故障时,系统将根据故障情况决定是否退出循环。最后,系统收到结束命令后退出程序。
5 总结
本文基于STM32 控制器实现了基于图像识别的四旋翼无人机空中投放系统设计。系统通过MPU-6050 陀螺仪实现无人机姿态及位置检测。基于磁力计实现了无人机方向定位,采用气压计完成了其气压定高,并通过光流模块实现了定点飞行。为了提高飞行可靠性,系统设计了报警系统,实现了实时故障检测、处理及报警。同时,系统设计了丰富的IO 口,可以与遥控器、计算机等外设实时通信。在无人机超出无线通信范围时,实现了其自主飞行,自动完成飞行及物资投放任务。在物品投放的地点选择上引入了图像识别算法,通过图像的预处理及分析完成投放地点选择,并通过仿真与实验验证了方案的可行性。
