FPGA技术的多路并行通信信号采集系统分析
2021-01-28张丙辛贾欣蕊
张丙辛,贾欣蕊
(哈尔滨工程大学,黑龙江 哈尔滨 150001)
以往在采集数据过程中,单片机对ADC、存储器与外围电路内。直接采用MCU调控各路AID转换过程,一方面,增加了I/O资源的占用量;另一方面,也耗用过多时间调控与检测A/D过程。FPGA技术有时钟频率高、内部延时短暂、运转快速、工效高等诸多优势,带有充实的I/O储备资源,在采集多路数据上表现出强大的适用性,能快速、高效率地完成数据处理任务,有广袤的应用空间。
1 设计以FPGA技术为基础的多路并行通信系统
针对信道内传送的信息,若有目的性地进行扰乱,则被接收信号质量降低是必然事实,后果通常是信息量降低或传送过程切断。解读目标信号时域或转换域内的属性,为提升信号综合利用率提供理论支持。近年来,DSP、FPGA技术的研发均有跨越式发展,本文拟定基于DSP、FPGA研发设计出信号采集系统。
1.1 规划设计模拟电路
模拟、数字电路均是系统硬件电路的重要构成,前者的作用以放大处置输入信号为主,多配置放大器等精密度较高的装置。历经规范化处理流程后获得三路输出信号,其中,有两路被传送至数字电路内并转型为控制信号,另一路则被整合至A/D转换电路内。数字电路聚集成FPGA(EPF10K20TC144-4)芯片,A/D转换芯片(AD1674)功能在于把数据转型为数字喜好,而后调控信号流通及各类控制模块。当探测仪感知并探测到信号后,顺势将其传送至放大电路内,首级前置线性放大电路对脉冲信号做出放大处置。模数电路的作用主要是将拟化量转型成数字量,其驱动脉冲信号编译过程,为计算机处理操作创造便利条件。模数电路精确度高低是影响其分辨率、转化准确度的主要因素,因此,在选定分析器AID芯片时,需综合考虑转换速率、精度指标。AD1674芯片有12位,转换时间10μs,非线性为±1/2LSB,功耗200MW。

图1 通信信号采集程序图
1.2 规划设计采集程序
拟化人类对模糊信息的阐述形式,推导出模糊控制算法,基于个体既往知识总结形成的模糊规则库和模糊处理后的参照值一一匹配,导出逆模糊化数据,该数据传递出的最后决策和人脑做出的逻辑化推理有高度相似性。模糊调控比较计算机和规则库后,将其转型为具有较高辨识度的语言(如图1)。
交通控制系统在运作过程中,针对接收到的信号要做出相应的转换等处置。大部分情景下,使用MCU调控通信控制系统阶段,受自身指令周期策的约束,通常会造成其运转过程迟缓,因此,本次设计中使用编程难度较小、快速运行的FPGA芯片。在设计信号采集系统实践中,FPGR技术运行时需有两块FPGA芯片辅佐,一块安放于采集系统的发送端,另一块被定位于A/D转换器与运算放大器共同构成的信号接收端。
2 通信信号采集处理实践
2.1 相位采集控制
在信号采集系统运作过程中,控制器发挥协调作用。ADC0809地址选择器对各道通道采集信息过程均能产出控制行为,而后针对存管于RAM内的ADC0809二进制数据,程序自动建设读写模型并作出阐释(如图2)。
在相同时间点于十字路口落实两个不同方向的采集任务所用时间,被统称为相位。在现实交通调控内,单个十字路口一般会被细化为东、南、西、北四方向的直行向与转弯向,因此单个十字路口持有四种相位。为确保系统能快捷辨识、采集数据信息,于多路并行工况下能快速转变信道方位信息,将客观因素对信号波段形成的扰动降至最低。因此,本文提出了采用多相位控制法(如图3)。

图2 基于四相位十字交叉路口通行图

图3 多相位控制法
该控制法由数个小型相位流程构成,对不同流程任务间信息流做出交融处理,达成全面采集、高效率共享通信信息资源的目的。本系统中的任意一个小程序均可追随另一个程序任务的运作节奏,同步落实收集信息的任务,并经由最后的通信机制传送与处理信息。
2.2 建设采集神经网络
为达成自动化控制,应先检测通行车辆有关参数。把控制器安置于十字路口中间部位,而后将流量测控仪安设于各条路段的入口端,把用于检测地感线圈的检测仪敷设于和各条路面下端相距100m处。用于测定即时相位车辆的同行频率,并将其设定为做出是否测定下一个相位决策的重要凭据。结合动态采集到的车流信息,有规划地调整相位次序,进而满足不同工况条件下提出的交通需求。
基于模糊算法概念,若检测到某相位车流量数值偏低时,可减缩对应相位启动时间。为降低误检风险,确保背后列队车辆安稳、有序推进,在相位启动10s后采允许检测器运作。而若一相位上车流偏多时,则建议适当延长相位的启动时间,但分析到其他相位上车辆状态,因此,要明确规定不能超出预定的时长上限值。为更有效地调控相位启动的时间参数,本文规划了图4所示的神经网络结构。
结合业内对模糊算法做出的定义,当检测到某个相位的车流量减少时,可以短缩该项目启动的时间长度。为规避误检情况,确保后面排队的车辆能安全顺利通行,在相位启动后10s检测器才开始运作。
以FPGA为基础设计出的交通控制系统测算快速、过程安稳、能快捷性地调控各相位状态等,这就预示这改系统能及时收集到车多路并行车流量信息,基于模糊算法深度分析后,有针对性地进行调控。为有效弥补现存交通控制系统运行时暴露出的不足,进而更有效地应对城镇区特殊时期交通阻塞的问题,利用VHDL语言编程设计信号采集系统,并且于Quartus II平台仿真拟化系统运作模式。仿真结果表明,该系统能结合车流动态改变情况,快速做出切实可行的整顿措施,如图5。

图4 神经网络结构图
2.3 数据处理
在数据处理模块中,DSP先利用BOOTLEADE流程,将存储在Flash内的程序代码迁徙至芯片内RAM,快速运转流程。程序先进行初始化,落实至双口RAM的通信。收集的数据短期内会被存储于双口RAM内,当采集的数据达到一定量并可以建组时,DSP芯片对其做出处理。
本系统自适应滤波器使用16阶FIP滤波器,用等同信号作为参照信号d(n)与输入信号x(n),选用上一时刻测算出的偏差值对本时刻滤波器系数做出修正。用自适应滤波算法处置一路输入信号x(n)以后,CCS3.3于计算机上能动态化的呈现出处理后的波形。
3 统计与分析实验结果
为更好地迎合系统对功能与技术提出的要求,拟定对系统进行拟化检测。检测结果表明:不同电路模块持有的各功能指标均具有较高的逻辑性,系统运行数据处置结果和软件仿真后产出值间完全统一,提示能高效率地调控多路并行车流量。图6为模拟仿真结果。

图5 通信系统结构程序图
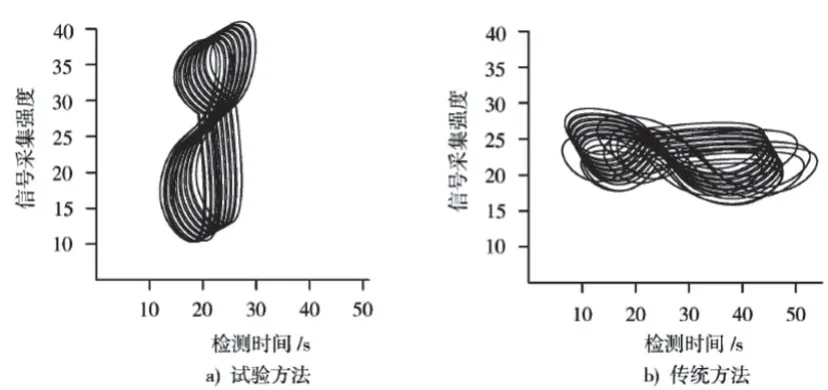
图6 并行通信信号仿真结果图示
和传统并行通信信号相位检测结果,能清楚地认识到在计算机协助下,建设现实交通情况的仿真模型,能更精确的预估交通状态,在采集多路并行通信信号方面表现出良好效能。并且在信号冗杂繁多的工况下,该系统运行过程相对稳定,信号传导过程步调基本统一,基本无偏差形成,和传统法相比,用时减少率高于50.0%。
4 结语
现代私家车数量有不断上涨态势,城市交通堵塞成为广大公众关注的一个社会性问题。交通控制系统在交通系统内占据核心地位,因此,本文规划设计了以FPGA技术为基础的信号采集系统,通过设计实验发现,该系统能快捷地采集车辆的通行频率,促进系统与数据源交互过程,且还能智能化做出有关调控策略,实用性较强。
