基于北斗卫星的全自动桥梁转体系统开发
2021-01-28高树能栾兴元
高树能,栾兴元
(中国中铁八局集团昆明铁路建设有限公司,云南 昆明 650200)
对于桥梁工程而言,转体施工技术拓展了建桥的范围,而且创新了建桥的思路,对于桥梁工程的发展具有重要意义。桥梁工程的转体施工是一种无支架的施工方式,施工过程中,将桥梁从跨中分成两个半跨,半跨施工完成后再通过旋转在跨中合拢,从而完成桥梁建设,桥梁转体工艺对于横跨大江大河、运营交通线等的桥梁建设具有重要意义。当前,桥梁转体主要采用水平转体和竖直转体法,并逐渐形成了相应的桥梁工程体系,在平原地区、山区、公路、铁路等工程中具有广泛的应用。
北斗卫星导航系统(以下简称北斗系统)是中国着眼于国家安全和经济社会发展需要,自主建设、独立运行的卫星导航系统,是为全球用户提供全天候、全天时、高精度的定位、导航和授时服务的国家重要空间基础设施。
随着北斗系统建设和服务能力的发展,相关产品已广泛应用于交通运输、海洋渔业、水文监测、气象预报、测绘地理信息、森林防火、通信系统、电力调度、救灾减灾、应急搜救等领域,逐步渗透到人类社会生产和生活的各个方面,为全球经济和社会发展注入新的活力。
卫星导航系统是全球性公共资源,多系统兼容与互操作已成为发展趋势。中国始终秉持和践行 中国的北斗,世界的北斗 的发展理念,服务 一带一路 建设发展,积极推进北斗系统国际合作。与其他卫星导航系统携手,与各个国家、地区和国际组织一起,共同推动全球卫星导航事业发展,让北斗系统更好地服务全球、造福人类。
本文拟将北斗卫星导航系统引入桥梁转体过程中,为提高精度在地面建立固定站,在转体桥梁上建立移动站,通过北斗卫星和地面站构建天地一体的转体角度监测系统,实现桥梁转体角度的实时反馈,开发桥梁转体的驱动控制系统,与北斗卫星的监测数据构成闭环系统,实现桥梁的全自动转体。
在高架铁路、大型桥梁等建设过程中,为尽量减小施工对其他经济活动的影响,如高速公路、铁路运输等,承建方多采用在铁路和公路旁边平行施工,在浇块段施工完毕后,通过墩顶预埋的转体装置完成墩顶转体,将桥梁结构转到原来设计的桥位上。
桥梁转体施工技术的运用在桥梁建设中有很多优点,具体表现在以下几个方面:首先,减少了建设成本。桥梁转体是利用桥梁本身的结构来做支撑,可以避免在河道上建设管架,降低钢管等材料的投入成本。其次,有利于确保施工安全。桥梁转体施工主要是采取岸边陆地作业的方式,避免了水上作业,改善了施工环境,有利于施工的安全。再者,将桥梁转体施工技术应用好,能更好地把控好桥梁的质量。而转体施工技术具有操作简单方便的优点,能缩短实际施工周期,提高了经济效益。
转动设备施工进行的主要要素之一,转动系统主要有牵引系统、防过转及微调系统、测量系统等组成。为了实现大动力、稳定性高的目标,转动牵引系统通常应该用全液压、自动和连续运行系统,在牵引所安装固定后,应该注意防潮、防湿,以保证使用期间的安全。微系统能让转体在一定范围通过修改相应参数实现微调。测量系统主要是提供转体数据,提高结构安装的精确度。
在桥梁转体施工过程中,最关键的是将可移动部分与固定部分精确对准。本文的重点即是解决高精度对准过程中的高精度定位问题。
1 主要技术创新点及系统组成
本文运用的关键技术主要有多频多星座联合高精度定位、观测量筛选与剔除技术。能够很好地适应野外环境:北斗系统适应野外施工条件,北斗覆盖区域均可使用;系统设备扩展性好:北斗卫星数据采集可以扩展应用提升时空精准度;系统设备能够重复利用:设备安装便捷,可重复使用;系统定位精度高:达到厘米级,能够满足桥梁、建筑物精确移动和高精度对准需求;系统设备实时性好:可以现场实时给出定位结果,无须对数据进行二次处理,满足快速施工需求。
图1为桥梁转体系统组成和工作原理图,其包括监测系统、控制系统和驱动系统。通过监测系统实时反馈转体桥梁的方位角信息给控制系统保证了转体桥梁的精准定位。

图1 系统组成基本工作原理
2 关键技术研究
2.1 转体检测系统
转体监测系统的组成和工作流程如图2、图3所示,监测系统由固定站、移动站、中心主机、通信设备组成。固定站安装在待转体的桥梁附近的地面上,移动站安装在待转体的桥梁上,通过高精度的北斗定位解算可以精确确定桥梁的方位角,即桥梁转体的角度。
具体工作过程为:固定站和移动站分别接收卫星导航信号,获取各自的原始伪距、载波相位观测量,并通过无线通信设备向主机发送,在主机上运行高精度相对定位解算软件,完成对固定站、移动站观测量的处理,得到移动站和固定站间高精度相对位置信息。在图形界面上显示该位置信息用于人员对施工状态的监视,也可以将高精度相对位置信息引入桥梁转体液压驱动电机的控制环路,使其完成桥梁的全自动精确转动。

图2 高精度北斗定位对准校准系统概念图
2.2 转体检测系统组成定位流程
基于北斗的高精度桥梁转体监测系统主要由数据存储单元、固定站数据处理模块、移动站数据处理模块、相对位置输出、显示模块和数据链路组成,系统的工作流程如图4所示。固定站与移动站的数据通过数据链路传输到统一的数据中心进行处理。收到的数据首先会存在一个数据存储单元等待处理。当收到当前历元的3个固定站的观测量数据后,会对固定站数据进行高精度解算,并根据所解得的基线向量结果来确定当前历元固定站在空间中的姿态和位置信息。在收到3个移动站的观测量数据后,可以获得当前历元移动站在空间中的姿态和位置信息,同时,获得移动站相对固定站的相对位置和相对姿态信息,然后,输出及显示移动站和固定站的相对位置和姿态。
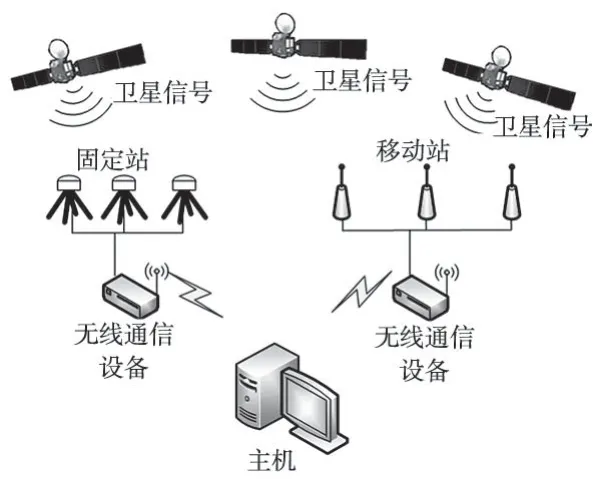
图3 高精度对准系统组成
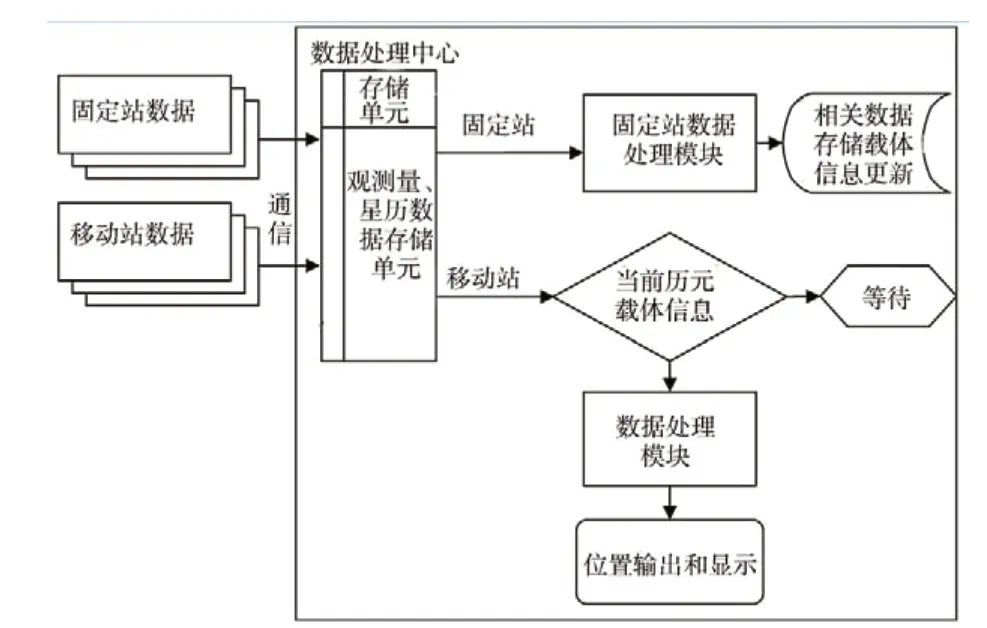
图4 整体定位系统流程图
2.3 高精度相对定位算法
为确定桥梁固定端和移动端的相对位置关系,需要对二者的相对位置和姿态进行测量,为此测量系统需要解算出3个固定站和3个移动站之间的基线向量。将该过程抽象成对多个基线的动基准RTK解算过程,其算法流程如图5所示。
2.4 相对位姿确定
利用高精度相对定位算法可以确定固定端三台固定站间的三条基线矢量,由于两条相交直线可以确定一个直角坐标系,因此,利用三台固定站可以定义一个固定端本地坐标系,在该坐标系下获得固定端和移动端的相对位置,即可用于高精度对准控制。
利用高精度相对定位算法可以得到三台移动站与所有固定站间在固定端本地坐标系内的基线矢量,从而最终得到二者的相对位置和姿态。
3 全自动桥梁转体监控系统
全自动桥梁转体监控系统是对整个转体桥设备的系统操作,涵盖了北斗的实时监测、千斤顶状态的反馈、参数设定、运行状态和运行模式选择(自动模式或手动模式),如图6所示为全自动桥梁转体监控系统图。全自动桥梁转体监控系统是一个执行整体运作的系统。
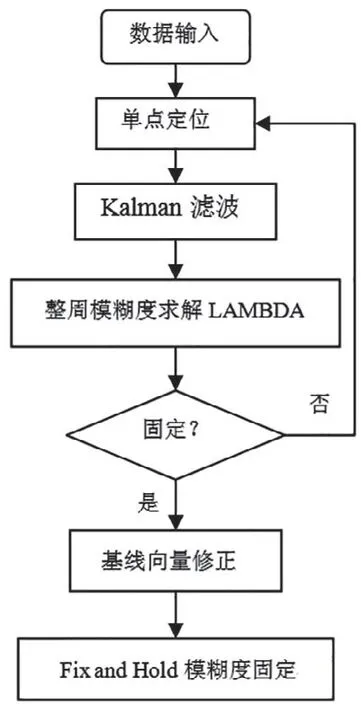
图5 RTK算法流程图

图6 全自动桥梁转体监控系统
3.1 北斗实时检测
北斗实时监测部分是利用北斗卫星系统对桥梁转体旋转角度的一个实时反馈。图7描述了实现监测系统的实现原理图,首先,我们可以预设转体角度为目标角度,如90度,云端服务器通过4G网络实时接收转体桥的测量角度,通过云端服务器计算转过角度和剩余角度,将上述角度通过4G网络发送给显示终端,进行显示,很好地进行了人机交互,如图8所示。为保证施工安全,还设计了两转体桥防碰撞预警系统。桥梁转体前左右转体桥上的定向接收机测量二者夹角作为基准角度,并预设两桥的夹角门限。转动过程中,软件同时接收左转体桥和右转体桥定向测量角度,同时,计算和监测两桥梁之间的夹角,并与预设夹角门限比对,当两桥梁夹角大于门限时给出告警信息,从而能够很好地预防两转体速度不一致导致的严重后果。
3.2 控制部分模块
对于桥梁转体千斤顶的控制是重中之重,也是本次工程中的第二大技术难点。控制部有两种控制模式,手动模式和自动模式如图9所示。在自动模式中可以提前设定预紧力,根据桥梁转体所需力的要求设定预紧力。在试转过程中,速度设为4km/h,试转角度可任意设定,一般设定5度左右。试转过后进行自动转体,一般设定剩余角度为3度左右,这所有的过程都可以是自动化实现,不再人为地点动转体。

图7 实时监测软件示意图

图8 监控系统—北斗实时监测部分
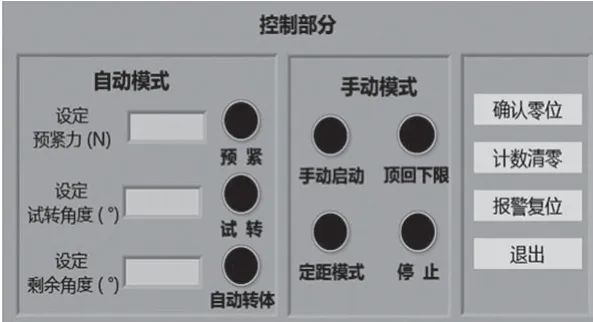
图9 监控系统—控制部分
4 桥梁转体中的自动化
在以往的桥梁转体中,都是人工是用对讲机交流,进行桥梁转体工作。本节将从桥梁转体工作中对比分析自动化桥梁转体的优点。如图10所示为进行桥梁转体操作的实际过程:

图10 桥梁转体实际操作流程图
第一天工程进行预紧,最主要的目的是确定钢缆达到的预紧力是否能带动桥墩底座转动。这种预紧力是可以计算出来的,所以这一操作过程是可以先设定预紧力,如图11所示,可以在监测系统中设定预紧力的大小,一般设定为13500N。计算出钢缆拉紧过程最平缓的拉紧方式进行预紧。通过北斗实时检测窗口观察所转角度,确定预紧力达到要求,保证在接下来停止转动时,设定的预紧力能够持续施力在钢缆上。

图11 自动模式下预紧力的设定
对于第二天的转体工作是试转,试转的目的是为了排除在正式转体过程中可能出现的问题。试转过程是人工通过对讲机交流进行点动操作,可能会出现信息延误,沟通不及时,操作工人会出现在不经商量的情况下做出决定而造成操作严重失误。实现自动化试转可以避免这些不必要的人为因素。自动化过程中通过北斗实时监测所反馈过来的角度可以准确地判断出各自桥梁所转的角度,通过对自己预设所转的角度与北斗检测所转角度对比,可以很好地控制所转角度的准确性。在试转的过程中一定要慢,这样才能在桥梁转动的过程中更好更准确地发现故障,从而排除故障。

图12 自动模式下试转角度的设定

图13 自动模式下剩余角度的设定
第三天的正式转体桥梁才是桥梁转体中最重要的部分。基于前年做好的准备工作开始进入正式工程。在一般人工桥梁转体过程中,都是通过好几个人上下通力合作,有人负责桥墩的刻度标尺观测,有人负责转体点动转动,在转动的同时,还要时刻注意两座桥梁不要产生碰撞,或者是两座桥梁的中心线产生的角度是否变小。这些工作都需要人工去判断和处理,难免会产生一些人为误差因素。使用全自动化的操作方式通过参数的设定可以避免这些问题。同步误差的设定可以避免两条钢缆位移不一致的问题;转体角度的监测可以时刻监测转体角度的变化值,碰撞预警角度的设定能够避免转体桥发生碰撞,起到双层保护的作用。在 后到设定剩余角度之前这段角度钢缆的速度都是可控的,都可以保持高速的匀速行驶,在即将快到达设定剩余角度时,还可以逐步降低速度,已达到避免桥梁惯性所到了的超出转体过程的后果,如图12和图13所示,可以在监测系统中设置试转角度和剩余角度。在千斤顶微调姿态时,还可以切换到手动模式进行点动微调,在之前的自动化方式运行中,大大地降低了出现事故的概率,并且还提高了作业效率。
在精确安装和已知旋转角度条件下,从预警到剩余1°范围内,可以实现桥梁转动角度的精确监测,从而实现闭环控制。
5 结语
本文设计了基于北斗卫星的全自动桥梁转体系统。通过北斗卫星和地面站构建天地一体的转体角度监测系统,实现桥梁转体角度的实时反馈,设计了桥梁转体驱动控制系统,与北斗卫星监测数据构成闭环系统,实现桥梁的高精度全自动转体。本文设计开发的基于北斗卫星的全自动桥梁转体系统在行业是首次采用,达到了降低安全风险、提高对接精度,提高效率的目的,得到了业主的好评,具有一定的推广价值。
