基于扰动观测器和神经网络的自动门系统安全性优化研究
2021-01-28李文萱殷大澍
李文萱,殷大澍,刘 倩
(滁州职业技术学院,安徽 滁州 239000)
0 引 言
滑动式自动门(以下称为“自动门”)因其便利性被广泛应用在大型零售商店、医院、餐厅和政府机关等各种建筑物中。此外,自动门能够防止热量损失,因此可在节能方面起到积极的作用[1]。然而,自动门碰撞或侵入导致的安全事故有增加的趋势,例如面部、手或脚受伤。这两种类型的事故主要发生于自动门打开或关闭时。
为避免这些安全事故,自动门应具有相应的安全装置,它们安装在自动门两侧的移动部件上或自动门上部中心处以检测人员进出,这些传感器包括红外传感器、热传导传感器和超声波传感器。但由于在安装过程中存在监测死区或传感器无法检测到人员等风险因素,仍可能会导致安全事故。另外,受传感器的成本约束,有些自动门未安装安全传感器。
与外部安全传感器不同,可以从自动门系统检测到事故。自动门系统通常由一个编码器来检测位置和一个测速器来检测速度[2]。典型的检测方法是基于模型的故障诊断方法[3]。此外,还有一种方法是使用从建模中获得的状态方程来设计干扰观测器。通过观察到的干扰程度设置阈值,可用于区分碰撞或干扰[4]。由于自动门系统由同步皮带驱动系统组成,上述方法不容易设定阈值,难以准确表示系统模型。因此,本研究引入一种将神经网络用作不确定系统和非线性系统的模型。
一般来说,自动门根据适合于乘客的限定速度曲线打开和关闭,曲线如图1所示。为了乘客的安全,速度曲线由加速段、恒速段、减速段组成。
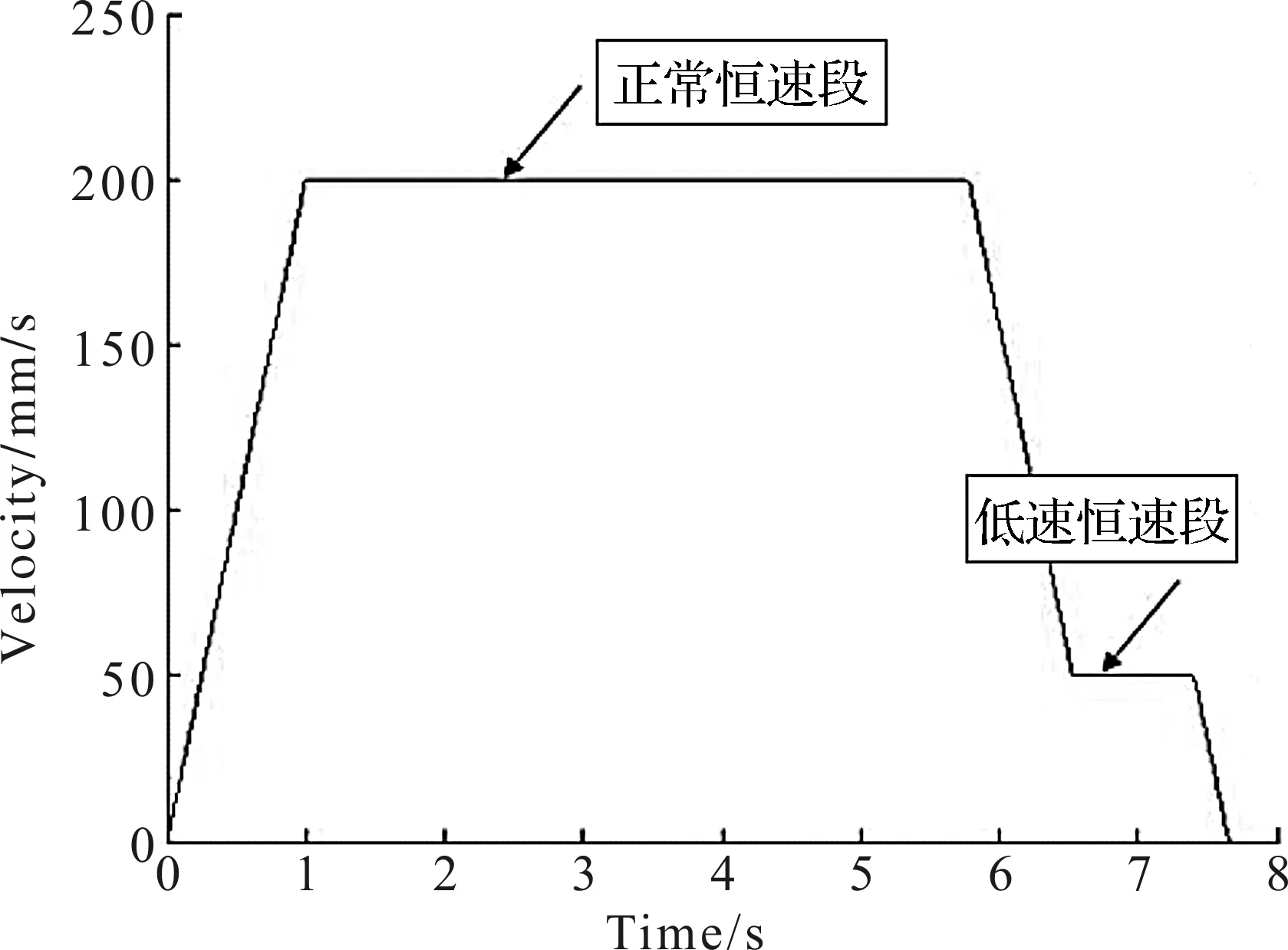
图1 速度曲线
图2所示为自动门系统以正常状态运行并且发生碰撞时的电动机电流波形。在图2中,当前值i1是在正常操作期间生成的最大电流值,并且当前值i2是发生碰撞或挤压时的瞬时值。
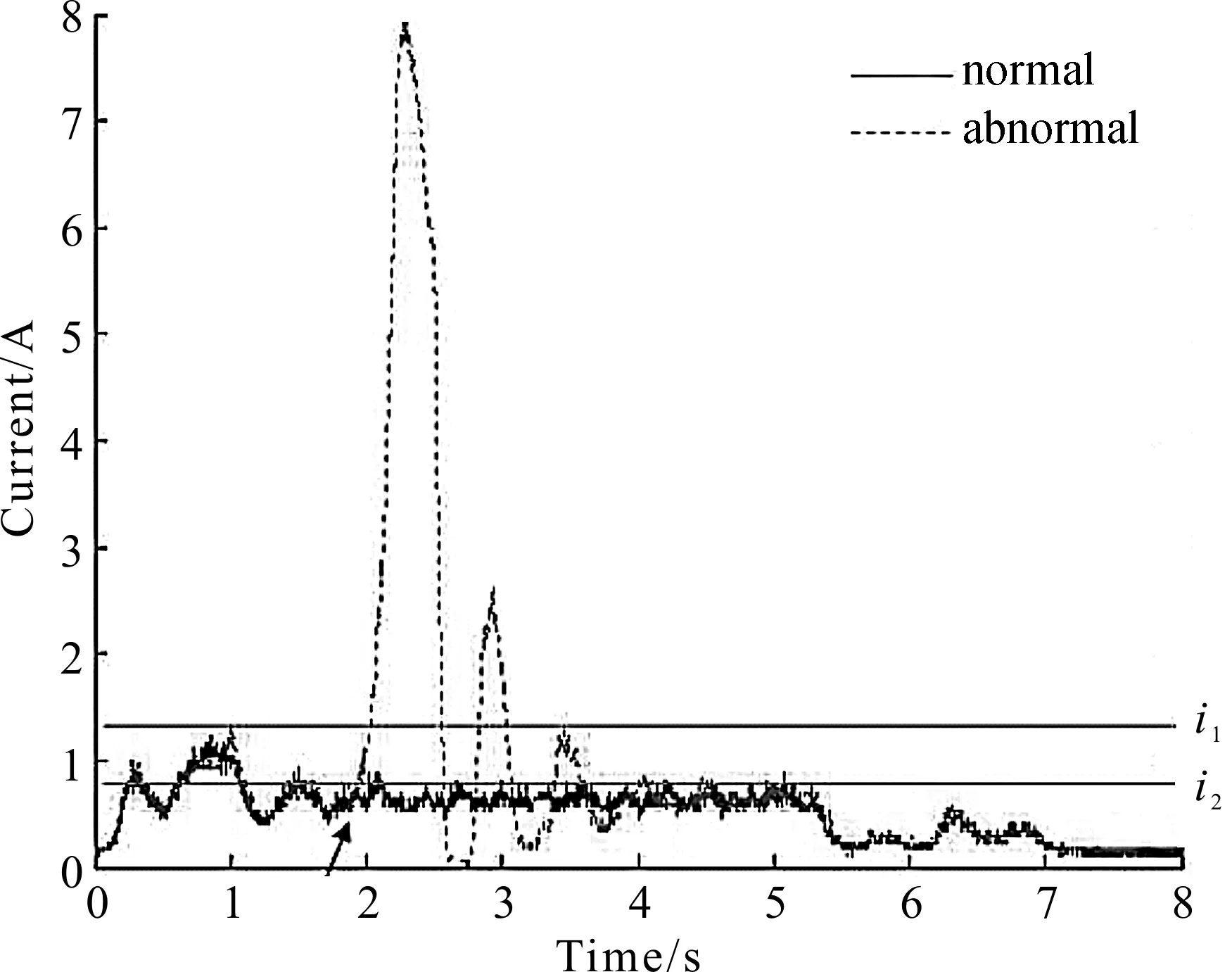
图2 电机电流波形
通常,当前值i1在正常速度的加速时段中具有最大值,并且可以通过该值来确定碰撞和折叠程度。如果基于当前值i1确定判断标准,则假定在时间tab发生碰撞或干扰。通常,使用PID控制器的自动门即使发生碰撞也将感测阈值设定为高,因此流过电动机的电流值必须增加至i1以上,导致相撞乘客面临更大风险。为了解决这个问题,有必要根据速度曲线收集关于准确电流值的阈值信息,从而构建自动门的动态模型。
本文提出了一种自动门系统模型。通过所提出的模型设计了观测负载变化引起的非稳态动力学响应的扰动观测器,通过所提出的神经网络学习方法观测扰动[5]。进而提出了一种利用干扰和差异来检测自动门系统的碰撞和故障的方法。为了体现出系统的可行性和优越性,可与实际测定的电流进行对照,并进行核实。
1 自动门系统的建模
自动门的滑动结构如图3所示。电力传输系统由同步皮带系统安装,并由直流电机驱动。[6-9]
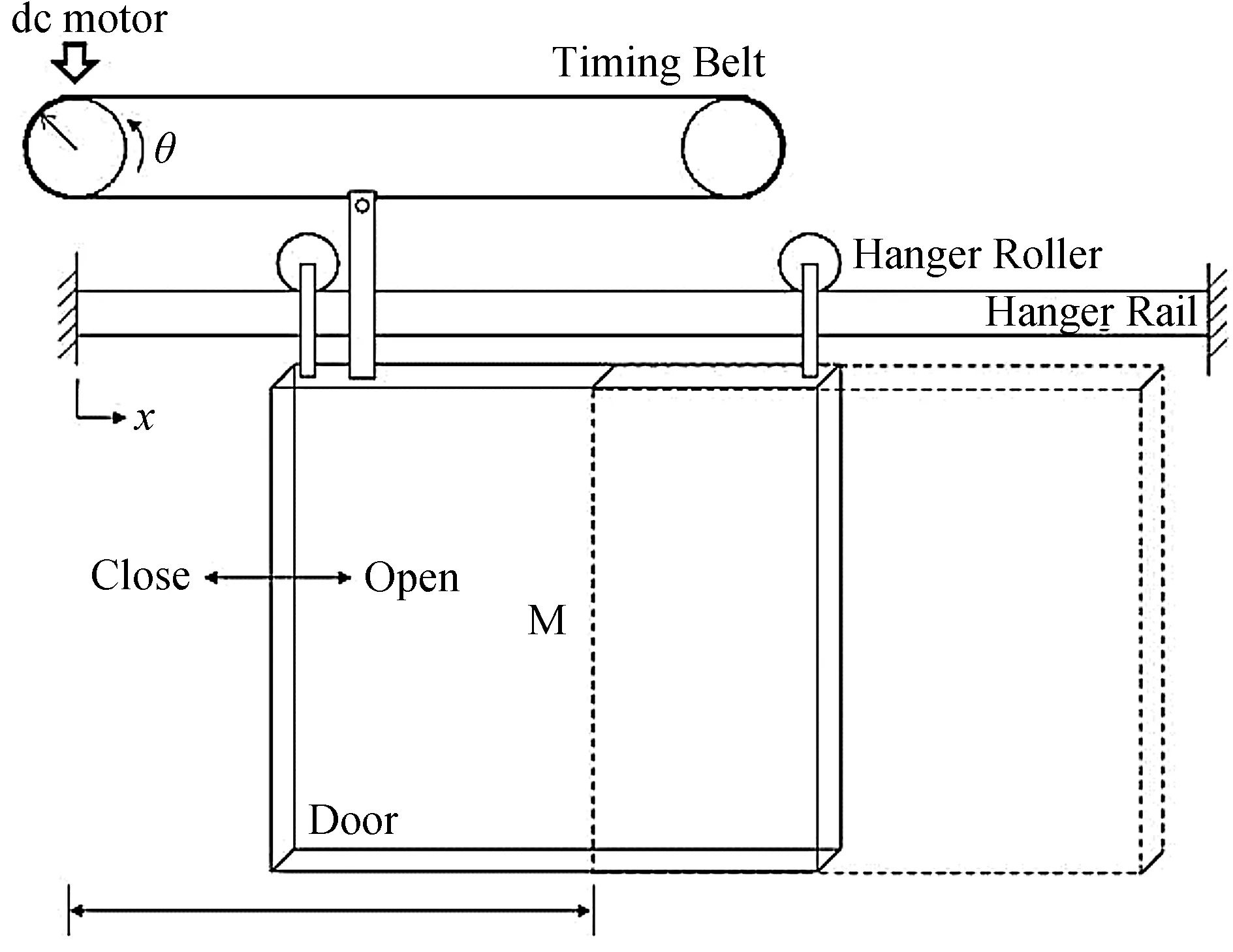
图3 自动门的机械结构和传动系统
自动门系统的数学模型假设皮带轮的摩擦和惯性不存在,皮带的质量可以忽略不计,皮带传动在皮带的线性弹性范围内运行。[8]由于自动门的重量根据安装位置而不同,所以产生的转矩Ti设定为未知负载,并且在吊杆辊和吊杆之间产生的摩擦转矩Tf设定为未知负载。另外,扰动设置为Td并反映在电动机侧负载转矩TL中。其中J是电机和齿轮的惯性之和,B是电机和齿轮侧的库仑摩擦之和。减速比G是11.875。
(1)
(2)
(3)
(4)
Tf=μMg
(5)
式(1)—(5)中:θm—电机的旋转角度;
θ—负载的旋转角度;
ωm—电机旋转的角速度;ea—电机输入;
ia—电枢电流;M—门重量;
g—重力加速度;μ—摩擦扭矩常数;
Td—扰动扭矩;Ra—电机电枢电阻,Ra= 4.15 Ω;
La—电机电枢电感,La= 0.001 22 H;
kt—电机转矩常数,kt= 0.061 019 16 N·m/A;
ke—电机反电动势常数,ke= 0.061 019 16 V·s/rad;
J—转子的电机侧转动惯量,J= 0.5×10-5kg·m2;
B—电机侧粘性摩擦系数,B= 0.2×10-4N·m·s/rad;
G—减速比,G= 11.875);
r—滑轮半径(r= 2.2 cm)。
如果将状态变量定义为:

(6)
式(6)中:T是矩阵的转置,自动门系统的状态方程为式(7)。
(7)
(8)

(9)
式(7)—(8)中:x(t)—状态变量;u(t)—控制输入;T(t)—干扰,定义为自动门的惯性矩,摩擦转矩和未知干扰之和;y(t)—输出。
考虑到LQR分析的差异成本函数,即可得到方程:
(10)
式中:Q—正半限正对称矩阵;R—正加权对称矩阵。
则反馈控制的规律:
u(t)=-Kx(t)
(11)
K=R-1BTP
(12)
式(11)—(12)中:K—控制增益矩阵;P—正半限对称矩阵,是下面的Riccati方程的解:
PA+ATP-PBR-1BTP+Q=0
(13)
式(11)中的u(t)是没有考虑扰动TL(t)的控制输入。如果扰动是可观察的,则新的控制输入可以表示为:
(14)
2 扰动观测
由于扰动变化远慢于控制器的控制采样周期,因此负载扰动的变化率可以视为0。所以将干扰作为状态变量引入如下:
(15)
从方程(7)—(9),得到扩展状态方程如式(16)。
(16)
(A,C)是可观测的,可以应用具有干扰的全尺度观测,见式(17)。
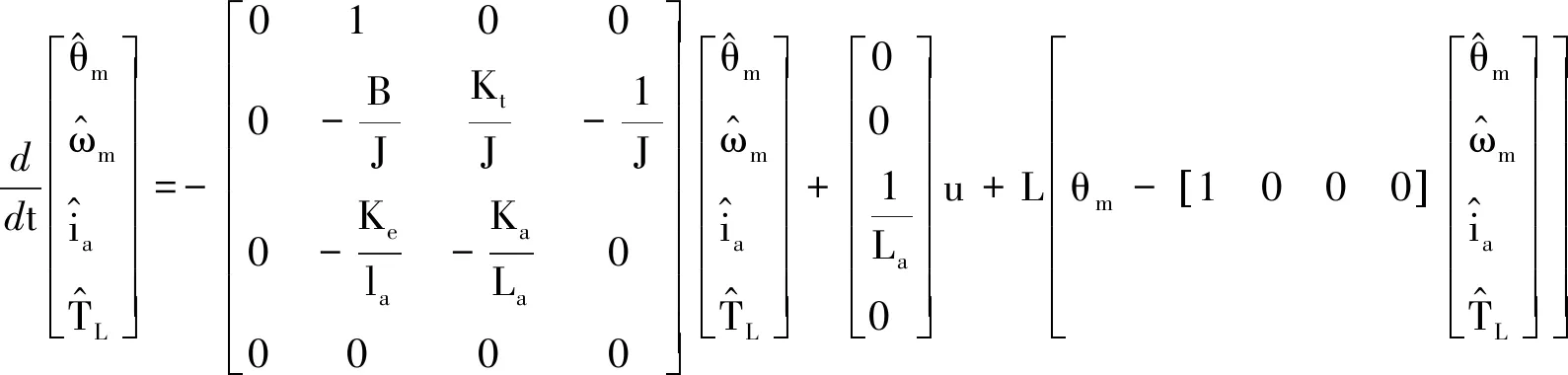
(17)
若将观测根置于s=a1,a2,a3,a4,那么观测的特征方程α(s)如式(18)。
a(s)=(s-β1)(s-β2)(s-β3)(s-β4)
(18)
公式(17)中的L是观察增益矩阵,可以用Ackerman公式得到,而K则由式(19)计算所得。
(19)
3 试验系统
3.1 试验技术

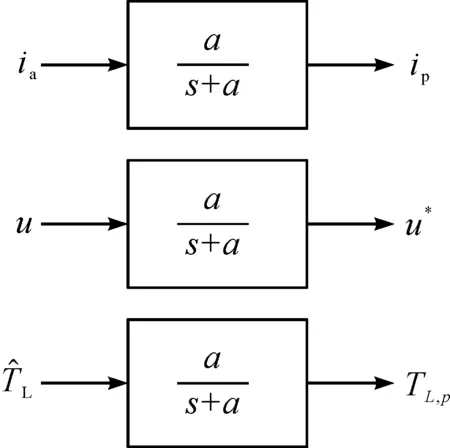
图4 低通学习数据(a>0)
3.2 试验系统
通过试验来探究所提出的自动门控制器的性能它被执行。实验中使用的编码器为90 W,DC24V,惯量系数为0.5×10-5Ω·m2,脉冲数为128的直流电机。 实验中使用的系统框图(见图5)。Atmel的ATmega128是一个实验系统,包括一个PWM逻辑单元,可驱动直流电机,电源电路和电机的当前位置,还有一个获取生成电流的ADC。
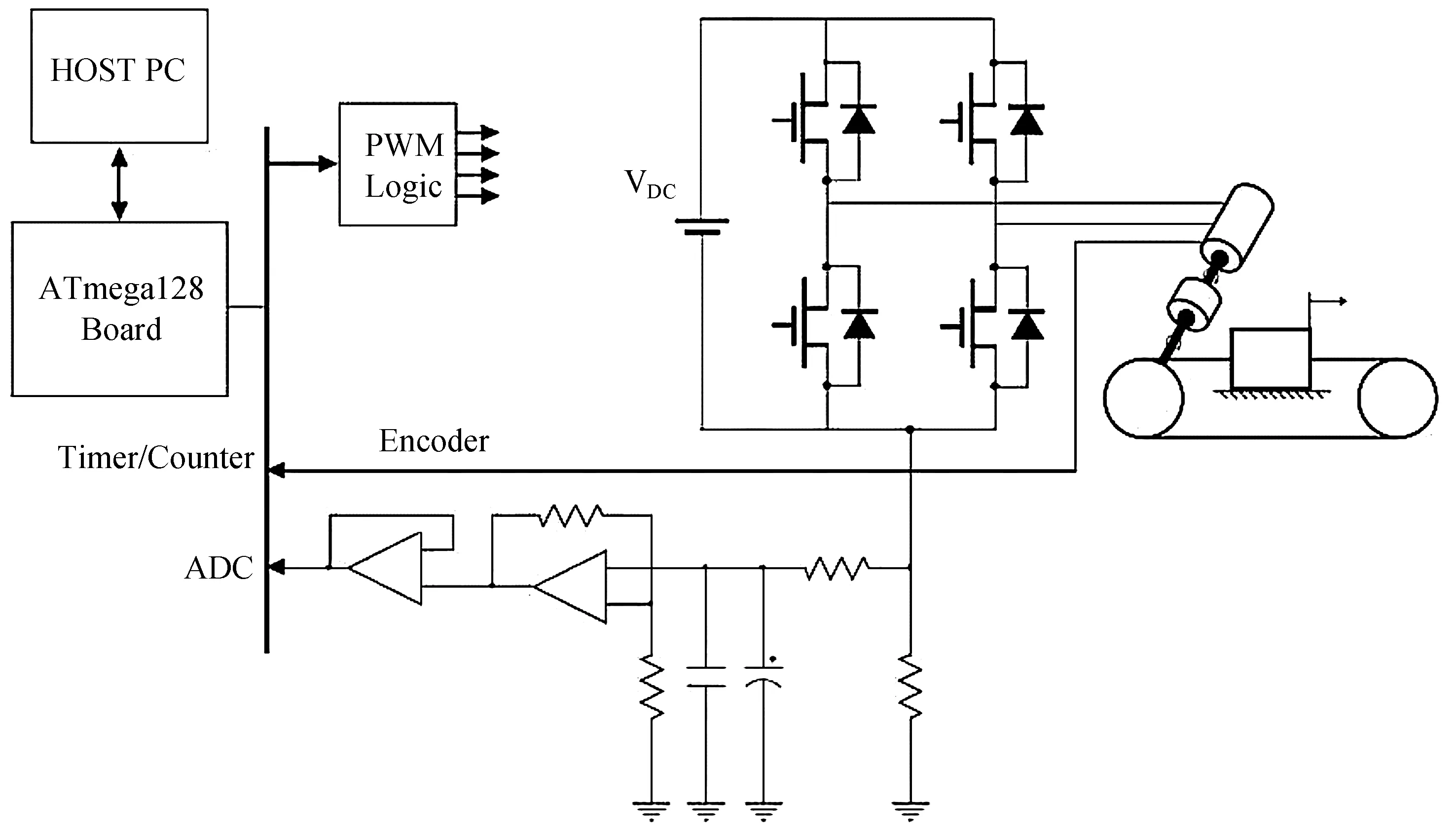
图5 实验系统搭建
逻辑检测自动查询到冲突或中断时按以下模型:
(1)使用当前模型
IF |im-ip|>ithTHEN Abnormal
ELSE Normal
(2)使用干扰模型
IF |Tlm-Tlp|>TthTHEN Abnormal
ELSE Normal
其中,ith表示模型电流与实际电流之差的阈值;Tth表示模型扰动与实际观测扰动之间的差值。
4 实验结果分析
将图1所示的速度曲线应用于实际自动门的关闭操作。总运动距离为1 100 mm,低速起动部分的长度为50 mm,正常速度为0.2 m/s2,低速为0.05 m/s,所有加速度为0.2 m/s,减速度为0.2 m/s。
图6显示了正常自动门操作期间学习和测试干扰的结果,表明提出的电流模型和扰动模型在测试应用的效果较好。如图7所示,在正常情况下,-0.1<Δi<0.1,所以-0.0<ΔTL<0.01设定为0.1,Tth设定为0.01。由于乘客的碰撞可能发生在关闭操作中的某个点,自动门碰撞测试设置在30 cm、50 cm、80 cm和105 cm处。由以上测试结果分析,其阈值ith和Tth的设置是合理的。图8显示了|Δi|的值,表明阈值ith是合理的。 图9显示了|ΔTL|的值,表明Tth是合理的。可以看出,带有扰动模型的神经网络作为当前模型的神经网络可正常运行。
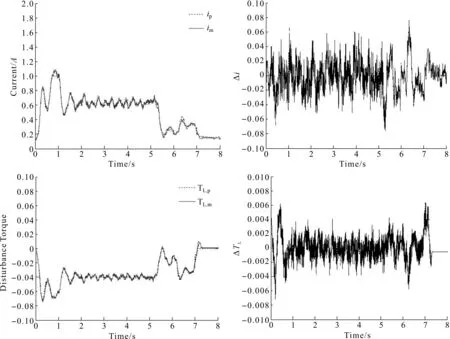
图6 正常操作
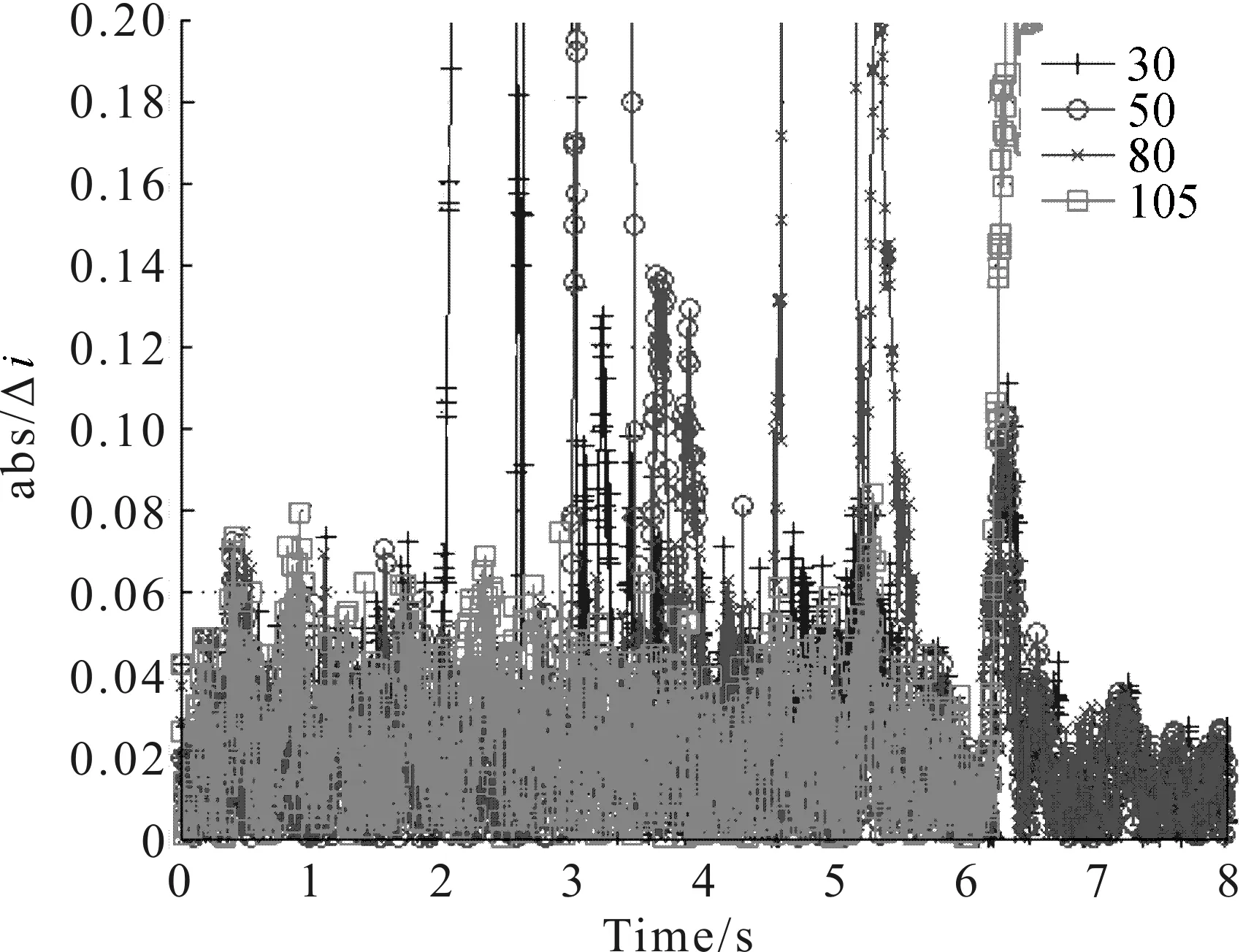
图8|Δi|的实验波形图
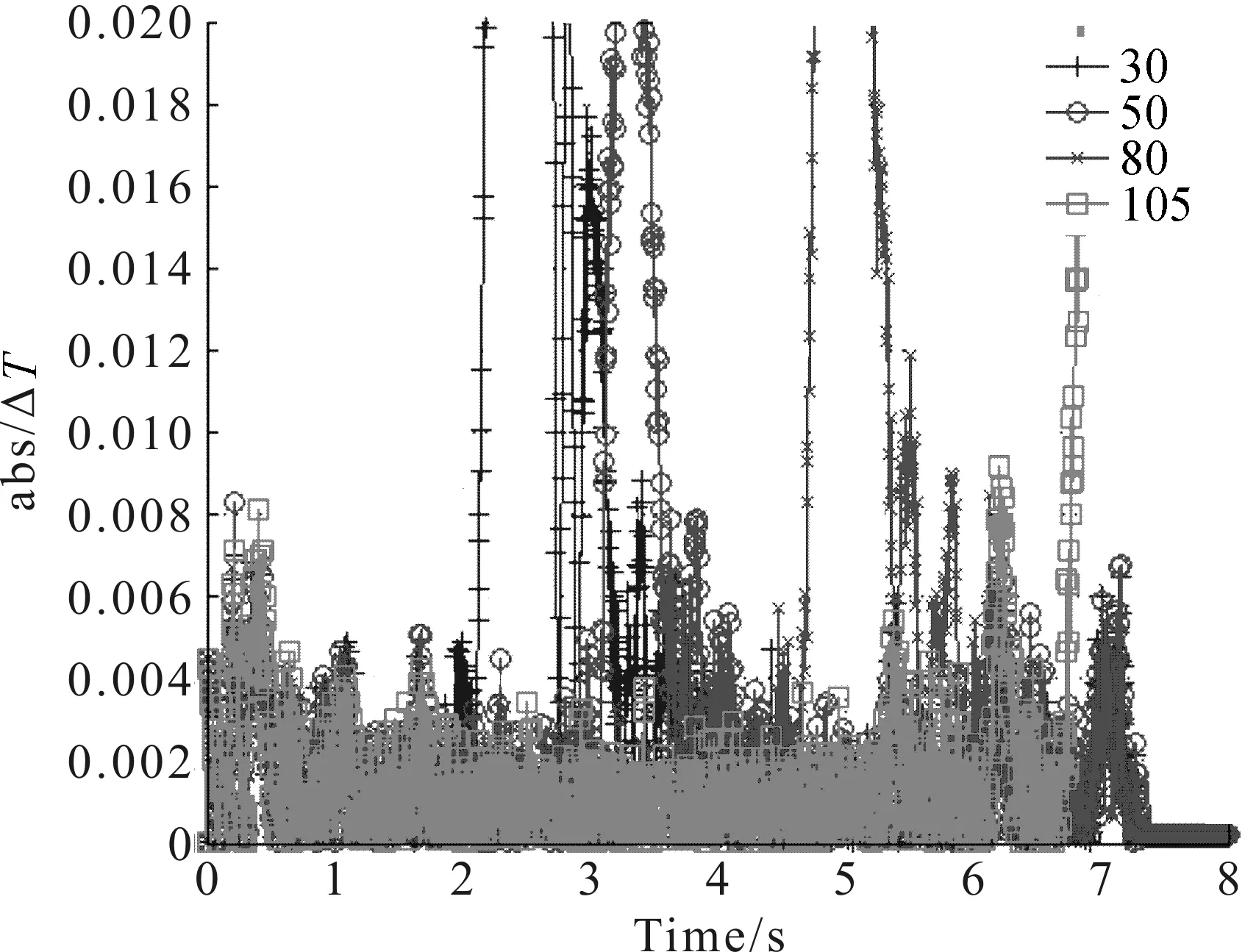
图9 |ΔTL|的实验波形
5 结 论
本文提出了一种使用干扰观测器和神经网络来检测人的碰撞或干扰的方法。通过实验表明了现有模型和扰动模型神经网络的有效性。在传统的自动门中,只有安装在外部的安全传感器才能检测到自动门中的干扰或碰撞。然而,本文结合神经网络学习了不带安全传感器的干扰观测器得到的异常干扰和相关动态变量,以此预测安全事故。将上述方法与传感器相结合,可进一步优化自动门的安全性。
