电机发电特性优化再生制动控制策略的方法
2021-01-27方桂花王鹤川胡贤东
方桂花,王鹤川,曾 标,胡贤东
(内蒙古科技大学机械工程学院,内蒙古 包头 014010)
1 引言
对电动车辆开发制动能量回收技术是提高汽车行驶里程、降低尾气排放有效方法。电机在制动过程中处于发电状态,驱动轮经过传动系统驱动发电机进行发电。制动力的分配策略是保证安全制动、提高制动能量回收效率关键,国内外许多学者对此进行了研究并以模糊控制策略为主,文献[1]建立了一种以整车制动力、车速、电池SOC 作为模糊控制器的输入,再生制动转矩分配系数为输出的控制算法,控制效果良好;文献[2-3]提出了一种模糊控制策略,将制动踏板信号作为控制器输入的一部分;文献[4]设计的模糊控制算法对ISG 电机转矩系数跟踪控制,实车试验结果验证了该算法的有效性。
模糊控制表的量化等级有限,造成该算法在再生制动控制中存在一定能量损失,增加量化等级提高控制准确度的方法会增加控制器运算处理时间,降低模糊控制器的处理性能。建立的再生制动控制算法分为两层次,下层算法为传统的汽车再生制动模糊控制算法,上层算法为基于电机发电特性MAP 的最大发电功率点追踪算法,两种算法结合既保留模糊控制法的非线性处理能力,又可以对电机最大发电功率进行寻优控制。
2 车辆制动能量回收系统简述
在车辆在制动过程中,动能施加在驱动轮上进入传动系统,此时电机处于发电状态,能量管理系统将电机产生的能量存储到电池中,再生制动能量回收系统简图,如图1 所示。

图1 制动能量回收系统简图Fig.1 Schematic Diagram of Braking Energy Recovery System
在该过程中系统能回收的能量E 可表示为:

式中:ηe—电机发电效率;ηt—传动系统效率;ηh—电池充电效率;m—车辆质量;v0—制动初速度;v1—制动过程终止速度;s—制动距离;Ff—滚动阻力;Fi—坡道阻力;Fw—空气阻力;Fu—总机械制动力。
主要研究依据电机发电MAP 图对传统模糊控制策略中再生制动力分配系数加以改善,进而提高能量回收量,电池充放电效率对再生制动的影响不作深入研究,在车辆制动过程中前后轴制动力分配方案采用传统的固定比值分配方式,前轴为从动轴用机械方式制动,后轴为驱动轴用机电复合制动,再制动力控制器确定电机转矩占当前转速下电机最大转矩的比值,后轴制动力不足部分由机械制动力补充[5],即:

式中:Fc—车辆总制动力;Ff—前轴制动力;Fr—后轴制动力;kf—前后轴制动力分配系数;Fmf—后轴机械制动力;Fe—电机再生制动力;kr—电机制动力的分配系数;Tmax—当前转速下电机最大转矩。
2 再生制动模糊控制器设计
2.1 控制器输入、输出变量选取
在能量回收过程中电机转速、制动强度、电池SOC 值对电机再生制动力占总制动力的比值有一定影响,电机转速在较低时(0~1500)r/min 发电效率很低,在高速阶段(2800~4000)r/min 电机最大再生制动力矩较小,应该减小电机制动力矩的比重,中等车速(1500~2800)r/min 能量回收条件良好,应使增大电机制动力矩充分回收制动能量[6];制动强度较大时(0.7~1)为保障制动安全,应降低电机再生制动力矩分配系数;当制动强度中等时(0.2~0.7),应增大电机制动力系数,尽可能回收制动能量;当制动强度较小时(0~0.2),应增大电机制动力分配系数,尽可能多的回收制动能量[7];电池 SOC 值较大时(0.7~1),电池不需要充电,这时逐渐关闭再生制动功能。SOC 值中等时(0.3~0.7),电机制动力矩可适当加大,SOC 较小时(0~0.3),电池可以回收较多的能量,这时应尽可能进行能量回收。模糊控制器对电机再生制动力矩的分配系数为 Kd,即 Kd=Td/Tmax。
2.2 输入输出量模糊化
规定电液复合制动力模糊控制器输入量模糊子集分别为三个输入变量的模糊集均为{High,Middle,Low},模糊论域均为{0,0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1},输出变量 Kd的模糊集为{High,Middle,Low},电机转速范围为(0~4000)rad/min,制动强度Z、电池SOC 值以及输出系数Kd范围均为(0~1)。以控制器三个输入参数对再生制动力矩系数Kd的影响因素制定电机转速、制动强度以及电池SOC 值的隶属函数,隶属函数形状采用正态分布函数形状,具体分布,如图2 所示。

图2 输入量与输出量隶属函数Fig.2 Membership Function of Input and Output
2.3 模糊控制规则
根据输入变量、输出变量的量化等级以及目前在该领域的控制经验,确定了27 条模糊规则,在matlab/fuzzy 控制器中,输入制动模糊控制规则,如表1 所示。

表1 模糊控制规则Tab.1 Fuzzy Control Rules
2.4 解模糊
传统再生制动模糊控制算法在解模糊过程中采用加权平均法将控制量模糊集合k 转为精确控制量kd,由于该算法的模糊集合量化等级有限,控制准确度存在一定不足,并且该模糊算法没有考虑电机发电特性对能量回收效果的影响,通过加权平均算法求解控制量模糊集合k 得到的精确控制量可以保证制动安全但在能量回收效果方面存在不足[8],这里为保留模糊控制器的非线性求解能力,将模糊控制器输出的(0~1)之间的控制量等量划分为十个等级,并将结果作为最大功率点跟踪控制器的输入量,求解每一等级范围下的最大发电功率控制点。
3 最大功率点追踪算法设计
电机作为能量回收系统的核心部分,研究变速变负载的发电特性对提高能量回收效率有重要意义。电机的发电功率:

式中:P—电机发电功率;T—电机转矩;n—电机转速;η—电机运行效率。
电机的发电特性MAP 图是描述电机在运行过程中转速、转矩与工作效率关系的重要参考依据。某公交车50kW 电动机MAP图,如图3 所示。在能量回收过程中,电机转速逐渐降低,电机再生制动力矩为控制器的输出量,模糊控制器输出的电机转矩等级系数与当前时刻电机转速范围在电机MAP 图中确定一区域,假定该区域为A 区,可以看出转矩增大发电效率降低,转矩减小发电效率升高。

图3 50kW 电机效率MAP 图Fig.3 MAP Diagram of 50kW Motor Efficiency

图4 改进式三点比较发计算流程图Fig.4 Improved Three Point Comparison Calculation Flow Chart
在区域中采用最大功率改进式三点比较跟踪算法中的进行电机发电功率寻优控制,通过调节电机转矩T 的大小使电机发电系统始终工作在或接近最佳状态获得最大输出功率[9]。在MAP 图中的 A 区从下到上依次取 3 个功率点 P1、P2、P3分别对应 T1、T2、T3,以 P2为基准点,T2为电机转矩实际值,P1、P3相应的再生制动转矩分别与之相差-ΔT 与ΔT,最佳功率点位置与此3 个功率点有以下3 种情况:(1)P1>=P2>P3,最佳功率点应在基准点P2下边,下次搜索基准点选为P1;(2)P3>=P2>P1,最佳功率点应在基准点 P2上边,下次搜索基准点选为 P3;(3)P2>P1且 P2>=P3,最佳功率点在基准点P2附近,基准点位置不变。对于情况(1)、(2),基准点离最大功率点侧距离较远[10],令ΔT=ΔTKm,Km>1,重新计算T1=T2-ΔT,T3=T2+ΔT;对于(3)情况,令 ΔT=ΔTKm,Km<1,重新计算 T1=T2-ΔT,T3=T2+ΔT。该算法流程图,如图4 所示。
4 仿真分析
以某客车为例,在Cruise 软件中搭建客车整车模型,如图5 所示。在Matlab/Simulink 中搭建制动能量回收控制策略,如图6 所示。通过Interface 接口实现联合仿真,公交车整车基本参数,如表2所示。

图5 Cruise 软件中公交车模型Fig.5 Bus Model in Cruise Software
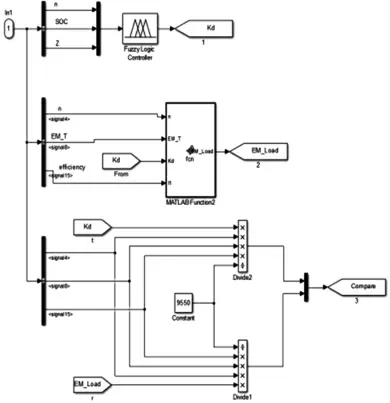
图6 在Simulink 中再生制动控制模型Fig.6 Regenerative Braking Control Model in Simulink

表2 公交车整车基本参数Tab.2 Basic Parameters of Bus
本次仿真中电池初始SOC 值设置为0.6,地面附着系数设置为0.8,车辆初始速度设为50km/h,制动强度分别为Z=0.2,Z=0.5,Z=0.8,制动强度Z=0.5 情况下模糊控制策略与设计的基于电机发电特性的改进控制策略的再生制动力系数对比图与再生制动能量回收效果对比图,如图7、图8 所示。
在Cruise 软件中电机转矩信号为负值,实际电机提供的再生制动力矩为控制系数与当前转速下电机最大转矩乘积,在图8中,改进控制算法的瞬时发电功率基本上大于模糊算法的瞬时发电功率。制动强度分别为Z=0.2,Z=0.5,Z=0.8 情况下优化控制算法能量回收对比图,如图9 所示。制动强度Z=0.2 时为保护电机,电机再生制动力较小;制动强度Z=0.5 时电机再生制动力矩较大,尽可能回收制动能量;制动强度Z=0.8 时,为保证制动安全,电机再生制动力矩占总制动力比值较小。详细的制动能量回收相关数据对比,如表3 所示。

图7 改进控制算法与模糊控制算法电机转矩控制系数比较Fig.7 Comparison between Improved Control Algorithm and Fuzzy Control Algorithm for Motor Torque Control Coefficient

图8 改进控制算法与模糊控制算法瞬时发电功率比较Fig.8 Comparison of Instantaneous Power Generation between Improved Control Algorithm and Fuzzy Control Algorithm

图9 改进控制算法在不同制动强度下的电机转矩控制系数比较Fig.9 Comparison of the Torque Control Coefficients of the Improved Control Algorithm Under Different Braking Intensities

表3 制动能量回收数据对比Tab.3 Comparison Of Braking Energy Recovery Data
5 结论
(1)以混合动力公交车的制动能量系统为基础,建立了电机转速、电池SOC、制动强度与再生制动力矩之间的模糊控制算法,并提出了模糊策略在控制电机发电功率方面存在的不足。
(2)基于电机发电特性设计了最大功率追踪算法中的变搜索步长三点法,控制电机再生制动力矩对电机发电最大功率点进行准确追踪,仿真结果表明该算法比传统模糊控制算法有较好的能量回收效果。
(3)建立了公交车的整车仿真模型,并对设计的改进算法分别进行了三种制动强度下的制动仿真,结果表明改进算法即满足模糊控制策略的设计原则,同时提高了再生制动能量回收量。