应用CAN 直流驱动自卸车电传动控制系统设计
2021-01-27王晓晶王丙军
王晓晶,王丙军
(安阳工学院机械工程学院,河南 安阳 455000)
1 引言
电动轮车辆在重型短距离装载运输的矿山应用普遍,尤其是露天矿山开采等应用越来越普遍。受制于机械传动设备加工尺寸和精度,尤其是超大型齿轮传动,在向大吨位发展的过程中,矿山运输车辆越来越多的采用电动轮自卸式车辆,其突破了传统扭矩传输和液力机构的限制[1]。此类传动实现能量从机械能到电能再到机械能的传递方式,通过线路替代原有的机械传递形式,加工更加方便,可以设计更大运输吨位的载重车辆,实现更高效的运输。
国内外学者对电传动控制进行一定研究:文献[2]对比不同算法对控制系统响应速度的影响;文献[3]基于CAN 总线技术对控制系统进行设计,提高了控制效率和控制精度;文献[4]应用交流传动互馈试验测试系统对电传动系统进行设计;文献[5]基于CAN 总线技术对直流传动控制系统进行对比分析。
基于电传动车辆的结构特点和功能需求,对电传动控制系统进行设计;利用更加有效的控制策略解决多年使用中碰见的问题,以期实现高效安全的控制和有效的运行;并且利用人性化的图形界面实现显示和故障诊断系统的智能化,以方便车辆驾驶和管理。
2 控制系统设计
电传动结构简图,如图1 所示,整个系统经过机械能-电能-机械能的两次能量转化[6],提高了传递效率。

图1 电传动结构简图Fig.1 Electric Drive Structure Diagram
2.1 控制系统结构
牵引时,柴油机驱动主发电机,发出两组三相交流电,经整流单元UZ1 整流后,在接触器KM1 获电的条件下,送到串接的牵引电动机M1,实现汽车牵引。牵引原理图,如图2 所示。
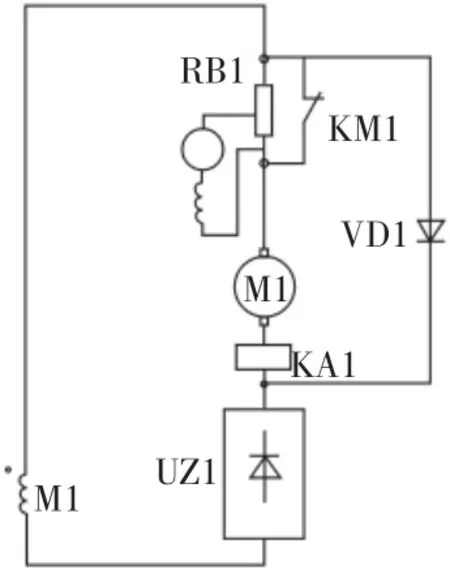
图2 牵引电路原理图Fig.2 Traction Circuit Diagram
在系统的主回路里面,整流单元和电动机的电枢绕组以及电动机的励磁绕组串联在一起,保证了主电路的电流的大小一致。在实际中电动机的励磁绕组是反向串联,所以这样就保证了两个电动机一个是顺时针的转矩,另外一个是逆时针的转矩,这样就保证了电动机的前进方向是一致的[7]。换向电路、磁场削弱电路、保护电路、励磁和辅助电路,如图3 所示。
牵引电动机M1在后桥壳里安装(为使车轮旋转方向一致,两组牵引电动机的励磁绕组相反串联)。牵引电动机是串励直流电动机,通过接触器 KM4、KM5的闭合,KM6、KM7的断开,或相反的控制来改变串励绕组的电流方向以实现汽车的换向,换向原理图,如图3(a)所示。需要制动时,踩电制动踏板,KM1 断开,制动电阻接入,实现电制动。在电制动过程中,根据不同的阶段有不同的控制策略,续流二极管VD1 为制动过程(能耗制动阶段)提供续流回路,在电动机制动过程中起着关键作用[8]。当磁场削弱晶闸管VS6、VS7、VS8 闸管电路并联,通过分流实现磁场削弱,通过RS2 可以测量出弱磁电流的大小。导通时,牵引电动机励磁绕组与晶而晶闸管的开度就代表了弱磁深度。磁场削弱电路,如图3(b)所示。
防轮滑保护电路包括晶闸管VS4、VS5,当车辆打滑不严重时,控制器空制扣功,如果轮滑严重,判定牵引电机1 或2 打滑,对应控制器控制晶闸管VS4 或VS5 打开,部分制动电阻接入回路来限制电流[6]。防轮滑保护电路的原理图,如图3(c)所示。

图3 部分电路原理图Fig.3 Part of the Circuit Diagram
本发电机应用的是自励方式,当脱扣开关闭合后,控制KMB、KM9 闭合,蓄电池电压给发电机励磁线圈(F1~F2)初始励磁,如图3(d)所示。(1~2)s 后,发电机三次谐波绕组(S1~S2)发出单相交流电后,通过VD4、VD5、VS1、VS2 构成的半控整流桥开始工作,建立自励磁,给励磁线圈供电。
2.2 串励直流电动机
串励直流电动机的接线图,如图4 所示。它的励磁绕组和电枢回路串联。

串励直流电动机的气隙磁通随电枢电流Ia而变化,这是它的主要特点。

图4 串励直流电动机的接线示意图Fig.4 Series Excitation DC Motor Wiring Diagram
当电机的磁路不饱和时,串励电动机的电磁转矩为:

联合以上各式,得到:

2.2.1 串励直流电动机的起动
(1)降压起动
起动瞬间,通过调整电枢电压,可使得电压降低至U=(1.5~2.0)INRa,随 n 增加,Ea增大,而 Ia则降低,在此过程中,U 不断增加,Ia保持在(1.5~2)IN,至电压达到额定值 UN,此时系统处于稳定状态,整个过程结束。
(2)电枢回路串电阻起动
若使得电压不变而限制电流的值,可通过在回路中增加电阻的方式,则:

在线路中增加电阻,系统的启动过程时间较长,达到稳态时,转速较低,增加经济负担,因此,系统中采用的是降压启动。
2.2.2 串励直流电动机的调速

式中:β—比例系数,这样串励直流电动机的特性方程变成:

则,电气调速方法有改变端电压U,改变If和Ia的比值β,以及电枢回路串联电阻调速等方法,在本系统中采用的是改变端电压U,改变比值β 两种调速方式[9]:
(1)改变端电压调速
降低电枢外加电压的数值,导致转速下降。因为系统中的电动机的供电有同步发电机供给,这样就为改变电动机的端电压U提供了条件,在发动机的转速一定的时候,可以通过调节同步发电机的励磁来改变端电压的大小,在励磁电路一定的时候(晶闸管的导通角一定时),可以通过改变油门踏板的位置来改变同步转速以改变端电压[10]。接线原理图,如图5 所示。可以看出,当前面介绍的同步电压改变的时候,两个整流单元UZ1 和UZ2 的整流输出电压就相应发生变化。改变端电压调速人为特性曲线,如图6(a)所示。

图5 串励直流电动机的接线图Fig.5 Series Excitation DC Motor wiring Diagram
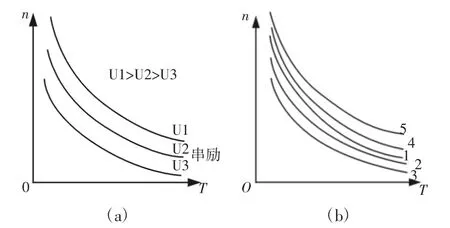
图6 串励直流电动机改变励磁电流人为特性曲线Fig.6 String Excitation DC Motor to Change the Excitation Current Artificial Characteristics
(2)改变 β 调速
改变β 调速,既弱磁调速,就是改变通入电动机的励磁回路中的电流来改变电动机的转速的调速方法。减少串励直流电动机的励磁电流If,使励磁电流和电枢回路的电流大小不相等。在图7中,可以看到,当需要进行弱磁调速的时候,只要控制对应的晶闸管VS6、VS7、VS8 导通,电枢回路的电流就可以经过一个回路进行分流达到弱磁的目的,这样的调速方式和降压调速可以配合使用,降压调速的时候,实际速度小于固有速度[11]。弱磁调速时,β<1,使得转速可以提高(如图7 中4、5 曲线,1 为固有特性曲线),在弱磁的时候灵活控制可以得到理想的转速。如果在电枢回路串联一个分流的回路,即在β>1 的时候,转速的调节是下降的(如图7 中2、3 曲线,1 为固有特性曲线)。系统中使用的弱磁调速是在牵引阶段,提高电动机的转速时使用的。改变β 的时候的人为特性曲线,如图6(b)所示。
2.2.3 串励直流电动机制动

图7 能耗制动特性曲线Fig.7 Energy Braking Characteristics
串励直流电动机在能耗制动时,电动机发出功率,做发电机工作,工作点,如图7 所示。图7 中的曲线1、2、3 为不同转速n1、n2、n3时串励发电机的外特性,直线4 是制动电阻R 的特性。从图中可以看出,转速越高,制动转矩越大,当转速低于n1时,即失去制动效力,能耗制动失效[12]。因此能耗制动必须要和机械制动以及其他形式的制动结合使用才能满足停车制动的要求。
反接制动时,由于端电压Ua不变,Φ 的方向相反,Ia方向不变,则:

可知,转矩T 反向,产生制动转矩。
由式(3)可知,转速 n<0。

可知,Ea<0,电磁功率PM=EaIa,可见PM<0,表示电枢吸收了机械功率,这是由整个机组转动部分的动能转化而来的功率。
又P1=UaIa>O,表示从电源吸收功率,可见,反接制动时,从电源吸收的电功率以及机组的动能对应的机械功率转化成的电磁功率,都以损耗的形式消耗在电枢回路和制动电阻中,功率平衡方程:

另外,可以知道在反接制动时,当转速下降到零时,转矩不为零,这时,应该把电机从电源上断开,否则电机将反向启动,就是倒拉反转[13]。
3 控制系统设计
控制系统原理框图,如图8 所示。根据设计需要,该控制系统由一个现场控制器(包括一个主控制器和一个从控制器),若干个发电机励磁控制器、制动控制器、逆变控制器,若干个带有LIN总线的辅助电气控制器组成。(1)主控制器:控制动力回路,与发动机、从控制器通信;(2)从控制器:主要控制辅助电气系统,与主控制器通信;(3)发电机励磁控制器、逆变控制器、制动控制器;(4)辅助电气控制器:控制雨刷、前后大灯、车门、空调、室内灯组等。

图8 系统原理框图Fig.8 System Block Diagram
3.1 主控制系统设计
主控制器需要采集的数据有:(6~8)个模拟量输入:加速踏板位置,制动踏板位置,限速旋钮位置,母线电压,母线低端对地电压,母线高端对地电压等;(10~12)个开关量输入:钥匙门(ACC-/ON/ST),换挡手柄(D/N/R),举升操作手柄(上/下/停/浮动)等;(6~8)个开关量输出:驻车制动电磁阀,发动机ECU 电磁阀,启动电机电磁阀,发动机风扇电磁阀,钥匙门(ACC/ON/ST)等;4 个CAN总线接口。原理图,如图9(a)所示。
工作原理:主控制器是整车控制的核心,是总线网络上最关键的主节点。它负责采集关系到整车正常运行的各项重要参数,接收发动机ECU 的广播数据,从控制器发送的数据帧,发电机励磁、逆变、制动的各项参数,综合判断车辆的行驶工况,并经过逻辑判断发送指令,控制整车的正常运行。

图9 控制器原理图Fig.9 Controller Schematic
3.2 从控制器设计
从控制器需要采集的数据有:
(6~8)个模拟量输入:燃油油位,水温,机油温度,机油压力,气压,若干液压阀等;(14~16)个开关量输入:屏幕手柄移动(上/下/左/右),屏幕手柄功能(确定/返回),故障指示检测,故障确认开关、远近光灯、左右转向、汽笛、雾灯等;(6~8)个开关量输出:故障指示灯,故障蜂鸣器等;(1~2)个 CAN 总线接口,一个 LIN 总线接口(具有CAN,LIN 网关的功能)。
液压控制器:如果车辆中的液压阀较多,还可在系统中专设一个液压控制器,负责控制整车的液压系统。从控制器原理图,如图9(b)所示。
工作原理:从控制器是整车电气控制的核心,是总线网络上的次要节点。它负责采集车辆的电气参数,接受主控制器的命令,并向主控制器反馈车辆的电气参数,帮助主控制器对整车工况正确把握。
3.3 发电机励磁控制器
发电机励磁控制器需要采集的数据有:采集(3~s)个模拟量输入:功率元件当前温度,当前励磁整流电压,当前励磁线圈电流,发电机定子当前温度等;I 个模拟量输出:励磁线圈电压(电流);(3~s)个开关量:待定(如报警灯);(1~2)个CAN 总线接口。
工作原理:发电机励磁控制器采集功率元件当前温度,当前励磁整流电压,当前励磁线圈电流,发电机定子当前温度等等模拟量,打包发送到主控制器,主控制器返回励磁线圈的目标电压、电流,在发电机励磁控制器中经过逻辑运算,由DSP 微处理单元输出合适占空比的PWM 信号,驱动IGBT 工作,使控制器输出合适的励磁线圈电压。发电机励磁控制器原理,如图10 所示。

图10 发电机励磁控制器原理图Fig.10 Generator Excitation Controller Schematic
4 实验平台验证
在实验系统中,考虑到车体庞大,输入输出的电气信号的分布比较分散,采用分布式的系统结构进行优化设计[14]。主控制器模拟采集驾驶室里面的加速踏板信号,制动踏板信号等车辆行驶相关的信号,以及经过高压信号采集板采集回来的高电压信号,并且通过CAN2 与从控制器、显示屏相互通信;从控制器负责显示屏的操纵手柄等信号的采集和处理;其他控制单元模拟动力回路上的励磁、逆变、制动等控制单元,采集若干模拟量和开关量仿真发电机励磁、逆变、制动的相关参数,并且通过CANS 与主控制器通信;CAN4 是冗余接口,充当CANS 的热备份接口。实验平台的系统结构图,如图11 所示。

图11 实验平台系统结构图Fig.11 Experimental Platform System Structure
4.1 主回路试验分析
主控制器,主要参数介绍如下:
CPU:2 个 16 位处理器
网关:J1939 协议(发动机参数存取)和CANopen 转换
数据存储空间 EEPROM:1×2kbyte,100 万次擦写能力
总线接口:4×CAN,125-1000kbps
程序下载:串口,125kbps
编程环境:PROSYD,c,c++,
AI 口:8 个(电压 4 个,电流 4 个)
DI 口:12 个
AO 口:1 个
DO/PWM 口:8 个
串口:2 个
采集点的选择,如图12 所示。试验台及主回路测试模块,如图13 所示。

图12 采集点选择Fig.12 Collection Point of Choice

图13 主回路测试Fig.13 Main Loop Test
UZ1、UZ2、URB1、URB2、UM1、UM2、UK1、UK2 等实验结果,如表1 所示。

表1 各测点输出参数Tab.1 Each Measuring Point Output Parameters
由表可知,模块的采集偏差控制在1%以内,试验过程中,系统达到额定转速时,输出电压为1350V,参考系统个回路影响,则测试结果是准确可靠的。整个过程可以发现,系统启动后,输出电压值比较小,发电机的励磁循环增加,系统电压达到稳定值时,循环才会结束。系统的漏电保护功能主要依靠UK1、UK2 之间的关系,同时根据二者之间的差值,可以快速查找漏电点,简洁高效。
4.2 辅助回路试验分析
根据辅助回路分析,搭建模拟试验台,包括操作杆、按键、指示灯、仪表等[15],如图14 所示。CAN 总线通讯信号波形,如图15所示。测试过程中,采用示波器获取CAN 总线通讯信号波形,分别为单帧和一段时间内的波形。测试时,系统可顺畅完成各部分辅助功能设计,结合波形图可知,传递信号流畅,可以准确高效的对辅助装置进行控制,而且具有良好的抗干扰能力。显示屏能够很好的实现能的显示和输出。
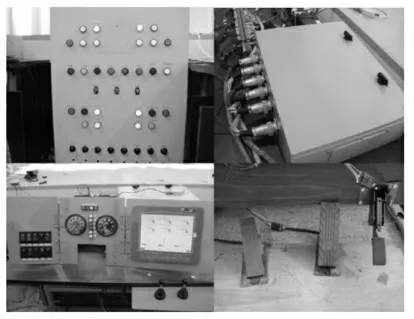
图14 试验台实物图Fig.14 Test Bench Physical Map

图15 CAN 总线通讯信号波形Fig.15 CAN Bus Communication Signal Waveform
5 结论
双控制器和显示器组成的控制系统,以CAN 总线进行各部分通信,采用模拟试验对系统进行测试,包括主电路和高电压采集试验,辅助回路试验,结果可知:(1)所设计的系统在主辅控制回路都可高效快速实现既定功能,整个系统简洁高效且实时性强;(2)CAN 总线通信过程中,系统信号流畅,使得整个系统结构简化,效率提高;(3)系统达到了设计目标,各部分功能实现良好,漏电保护电路使得系统更加安全,且更便捷的寻找漏电节点,各模块达到预期效果。