具有弱通讯的多智能体分布式自适应协同跟踪控制
2021-01-26薛惠锋
张 普, 薛惠锋, 高 山, 左 轩
(西北工业大学自动化学院, 陕西 西安 710129)
0 引 言
近年来,多智能体协同控制在现代工业、军事以及民用领域的广泛应用,如智能机器人、无人机、电网系统、卫星姿态等,吸引了大量学者的广泛关注,如编队控制[1-3]、协同追踪控制[4-6]、协同容错控制[7-9]、聚合一致性控制[10]、复杂动态网络协同控制[11]、城市交通网络拥堵协同控制[12]、传感器网络估计[13]、复杂系统协同控制等[14],其中多智能体协同跟踪控制是该领域最典型的热点研究问题之一。在已有多智能体跟踪研究中,所采用的模型均具有零输入状态的同构跟随者,而且领航者的位置和速度信息是已知的;此外,所采用的参考轨迹均已规划好,即给定已知参考轨迹。然而,在实际应用中,通常参考轨迹是按照时间函数变化的,并通过分布式控制实现协同跟踪。
值得注意的是,与一般单系统的跟踪控制相比,多智能体分布式协同跟踪控制的局限性在于,多智能体编队系统中只有个别智能体能够获得关于期望轨迹的全部信息,使得彼此之间的信息交互不全,导致跟踪效果差。针对这一问题,已有文献采用不同方法进行了相关研究。比如,基于行为法[15-16]、虚拟结构法[17-18]、领导-跟踪法[19-21]、基于图论法[22]以及人工势场法[23]等。然而,在实际应用中,这些方法在解决高阶非线性、系统参数未知或参数不确定、通信宽带有限、有限时间收敛、输入控制有界、网络拓扑连通性差、智能体之间数据丢失以及自身通讯能力弱等问题时,仍具有一定的局限性。因此,研究多智能体编队系统分布式自适应控制策略,对于含有以上约束的该系统协同跟踪研究具有一定的理论意义和工程应用价值。
针对线性多智能体编队系统在协同跟踪中的研究,文献[24]采用一种分布式自适应的方法,研究了带有未知参数的高阶线性多智能体系统,并给出了该系统实现协同跟踪的充要条件是网络拓扑中大部分智能体之间的交互通讯信号可测量。Ren[25]等人基于低增益反馈理论和李雅普诺夫稳定性理论,针对具有切换拓扑结构的二阶非线性多智能体系统,设计了一种控制协同跟踪控制律,能够有效地解决该系统在特定约束下的一致性跟踪问题。文献[26]针对智能体之间缺乏交互信息而不能保持一致的问题,提出了一种分布式线性协议方法,设计了一种协同跟踪控制律,使得智能体之间在缺乏信息的情况下,能够实现一致性跟踪的目的。
针对非线性多智能体系统的一致跟踪研究,Yu[27]等人针对含有未知非线性部分的二阶多智能体系统,采用一种平均脉冲间隔和脉冲增益方法,有效地解决了二阶非线性多智能体的耦合编队跟踪问题。Wang[28]等人针对追随者信息未知的二阶非线性多智能体系统,采用分布式鲁棒自适应方法,有效地实现了该系统在有限时间的一致跟踪。文献[29]针对多智能体在拓扑信息交互动态时变下的一致性问题,基于图论提出了多智能体系统实现一致性的条件是智能体之间的有向图有足够多的生成树。文献[30]针对通讯信号拥堵的二阶非线性多智能体系统,采用自适应量化和控制通讯信号变化的方法,初步实现了对多智能体的输入输出量化反馈控制,有效地实现了该系统的一致性跟踪。文献[31]针对含有未知参数及干扰不确定的高阶非线性多智能体系统,提出一种自适应模糊迭代学习算法,有效地实现了多智能体在某一区间内能够平稳追踪目标的目的。文献[32]针对高阶非线性多智能体中存在集中信息干扰的问题,采用了一种分布式EOS拓展状态观测器的新方法,有效地实现了该系统的一致性跟踪。
综上所述,对于智能体之间信息可测且网络通信状况良好的多智能体系统,采用分布式自适应方法能够有效地实现系统的协同跟踪控制。然而,对于智能体之间存在信息失真、丢包、延迟、网络通信较弱、间歇性通讯等问题的高阶非线性多智能体系统,目前仍然没有成熟和统一的控制律设计规则,能够保证智能体实现预设性能的协同跟踪。
因此,本文在文献[27,32]研究的基础上,针对多智能体编队系统协同跟踪的问题,研究其在弱通讯情况下的协同跟踪控制,即跟踪收敛性和跟踪效果研究。通过对多智能体系统模型中的不同参数进行估计,使得智能体在平面内整个追踪过程中,对纵向、横向以及任意两个智能体之间的相对距离误差进行补偿控制,以保证其误差快速收敛;同时引入时变参考轨迹,克服了常规的给定参考路径的局限性,有利于工程实践。相比文献[27,32]的研究,本文的创新点为:① 基于反推技术和时变参考轨迹策略,能够使多智能体在弱通讯情况下实现快速跟踪,并保持一致性;② 能够使在多智能体平面跟踪过程中,其横向跟踪误差、纵向跟踪误差、镇定误差以及任意两个智能体之间的相对距离误差均快速收敛;③ 针对系统中的不确定参数和非一致动态的非线性子系统,所提方法能够对其进行准确的估计,以便对该系统进行补偿控制,实现有效的跟踪。同时,该方法能够应用于多智能体编队系统协同控制,实现以最优轨迹避开障碍物,并保持稳定跟踪。
1 建立数学模型
1.1 图论知识
考虑由N个智能体组成的高阶非线性系统,这些智能体分别标记为1,2,…,N。智能体之间的拓扑交互信息用图论中的G=V×E表示,其中点集V={1,2,…,N}分别代表了N个智能体,边集E=V×V。每个智能体#i可以与其邻近的智能体进行信息交换。图G的邻接矩阵用A表示,其矩阵中元素aij=1表示智能体#i可以接受智能体#j的信息,反之aij=0。在网络拓扑结构中,度矩阵采用D表示,其中D=diag{d1,d2,…,dN},di=card{j:(i,j)=E}。定义拉普拉斯矩阵为L=D-A。其中,D[dij]∈Rp×p称为入度矩阵,当i≠j时,dij=0;否则,
1.2 弱通讯知识
弱通讯是指智能体之间信息交互与共享过程中存在周期性间歇或者时延,会严重影响智能体系统的跟踪或者协同控制。多智能体系统协同跟踪过程中存在弱通讯,如图1所示。
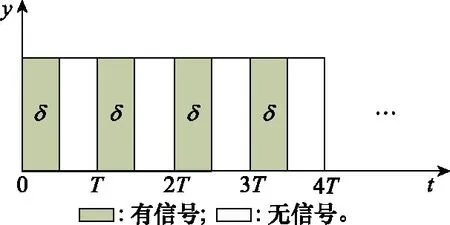
图1 智能体之间信息交互弱通讯示意图Fig.1 Schematic diagram of weak communication for information interaction among agents
在图1中,弱通讯主要分为两种类型:
(1) 完全周期性间歇。在有向图中,智能体与其邻近的智能体之间的信息传递会出现周期性中断,则称之为完全周期性间歇。
(2) 部分周期性间歇。在有向图中相邻僚机之间保持信息交互,但僚机与长机之间信息交互会出现周期性中断,则称之为部分周期性间歇。
引理 1对于多智能体系统,如果满足
(1)
则其能够实现信息的一致性。其中,x和v分别表示智能体的位置和速度,(i,j)表示两个不同的智能体。基于式(1),t同时满足图1弱通讯传输的条件,这也是本文基于此设计控制律的依据。
引理 2在图1中,对于T>0,在间隔[mT,(m+1)T]内,定义信息的传输速率为ρ=δ/T。其中δ表示在有信号的情形下,传输过程所需要的时间,T表示在弱通讯情形下信号传输的周期,包括有信号传输和无信号传输,其表达式为
(2)
式中,m∈Ν;k表示任意两个智能体在信息传递过程的权重因子,其大小取决于其拓扑结构中的拉普拉斯矩阵L;z表示跟踪误差;ui(t)表示第i个智能体的控制输入。
1.3 高阶非线性模型
针对含有弱通讯的多智能体系统,建立其非线性模型:
(3)

Q(u)=p(u)u+Δ(u)
(4)
式中,Δ(u)表示任意两个智能体在弱通讯情形下的控制信号误差。在多智能体跟踪过程中,视为一种干扰项。本文所设计的控制律是为了消除这种扰动对追踪效果的影响。除此之外,p(u)的值取决于输入信号的死区范围:
(5)
式中,umin和umax分别表示控制信号u的死区上、下边界。
在任意两个智能体之间通讯正常,但通讯信号强度较弱情况下,其信号误差满足
Δ(u)≤λ|u|
(6)
式中,λ表示实常数。
1.4 领航者动力学模型
在惯性坐标下,领航者的导航模型为
(7)

式(7)对时间求导,可得
(8)
式中,(ax,ay,az)表示空间3个方向的加速度。
根据式(8),可得领航者的动力学方程:
(9)
式中,(Fx,Fy,Fz)表示空间3个方向的力;m表示领航智能体的质量。
引理 3存在正实数a,b,p,q,满足1/p+1/q=1,则ab≤1/pap+1/qbq, 等号成立当且仅当ap=bq,此为杨氏不等式理论。
假设 1多智能体编队系统的通信拓扑图G是固定且有向的,确保多智能体编队系统在追踪过程中保持队形恒定。
在追踪控制律设计过程中,为了消除非线部分Δ(u),根据引理3,有
(10)

于是,可得
则式(10)成立。
假设 2多智能体之间的通讯是正常且顺畅,仅信号的强度不同。
假设 3参考轨迹yr是光滑有界的,且对于整个编队系统均已知,以此确保多智能体编队系统均按照时变的参考轨迹跟踪期望的位置信号,然后按照预设的队形运动。
1.5 避障模型
为避免在此跟踪过程中多智能体与障碍物之间发生碰撞,引入人工势场法建立多智能体避障模型,即智能体和障碍物带有同种电荷时相互排斥,带异种电荷时相互吸引。多智能体中任意一个智能体所受的合力为
fc i(t)=fi a(t)+fi r(t)+h(t)
(11)
式中,fc i表示第i个智能体所受的合力;fi a表示第i个智能体所受的引力;fi r(t)表示第i个智能体所受的斥力;h(t)表示调节函数。由于多智能体在追踪过程中,易出现局部极小值点,为了打破这一平衡状态,设计函数
(12)
式中,sign(ε)表示自变量为ε的符号函数,ε为很小的正常数。
除此之外,每个智能体所受的合力为
(13)
式中,mi和mj分别表示第i和j个智能体的质量;rij表示第i个智能体与第j个智能体之间的相对距离;bij表示拉普拉斯矩阵L中第ij项的数值。
当智能体靠近障碍物时,其相对距离变小,智能体所受的斥力大于引力,合力表现为斥力,智能体会远离障碍物;当智能体与障碍物远离时,其相对距离减小,智能体所受的引力大于斥力,合力表现为引力,智能体会靠近障碍物;当智能体与障碍物的相对距离为特定值时,斥力等于引力,此时会出现局部最小值点,通过函数h(t)微调其合力,表现为斥力或者引力,使智能体打破平衡状态。同时,多智能体编队系统以时变的参考估计跟踪目标,因此多智能体会以最优路径避开障碍物,跟踪运动目标,并保持队形不变。
2 分布式追踪控制律设计
在本文中,多智能体系统由N个智能体构成“领航者-跟随者”分布式模式的编队结构,其中包含1个领航者,N-1个追随者。基于系统模型式(3)、领航者动力学模型式(9)和避障模型式(11),针对弱通讯中完全周期性间歇的多智能体系统,采用自适应反演控制方法进行协同跟踪控制律设计,以避开障碍物实现协同跟踪。
定义智能体的追踪误差为
ki(yi(t)-yr(t))
(14)
式中,i=1,2,…,n,aij表示智能体#i和智能体#j之间信息传递的权重系数;ki表示正常系数;yi-yj表示智能体#i和智能体#j之间的相对距离差;yr为参考轨迹。
定义新误差为
zi,2(t)=xi,2(t)-αi,1(t)
(15)
式(14)对时间求导,并将式(15)代入求导结果,整理化简得

(16)
构造李雅普诺夫函数:
(17)

式(17)对时间求导,并将式(14)代入求导结果,整理可得
(18)

由式(18)可得虚拟控制律和调节函数,分别表示为
(19)
(20)
将式(19)和式(20)代入式(18),可得
(21)
同时,将式(19)代入式(16),整理化简可得
(22)
定义新误差为
zi,3(t)=xi,3(t)-αi,2(t)
(23)
式(15)对时间求导,并结合式(23),可得
(24)

式(19)对时间求导,可得
(25)
将式(25)代入式(24),可得
(26)
构造李雅普诺夫函数
(27)
式(27)对时间求导,可得
(28)
将式(21)和式(26)代入式(28),可得
(29)
同理,由式(29)可得调节函数和虚拟控制律,分别表示为
(31)
将式(30)和式(31)代入式(29),可得
(32)
将式(31)代入式(26),可得

(33)
定义新误差为
zi,q+1(t)=xi,q+1(t)-αi,q(t)
(34)
(35)
构造李雅普诺夫函数:
(36)
式中,Vi,q -1是第q-1步迭代设计过程中的李雅普诺夫函数。
(37)
由式(37)可得调节函数和虚拟控制律,分别表示为
(38)
αi,q(t)=-zi,q -1(t)-cqzi,q(t)-
(39)
定义误差为
zi,n(t)=xi,n(t)-αi,n -1(t)
(40)
(41)
构造李雅普诺夫函数:
(42)
式中,Vi,n -1(t)是第n-1步迭代设计过程中的李雅普诺夫函数。
(43)
根据式(3)和式(4),结合式(43),可得调节函数和最终控制律分别为
(44)
(45)
因此,式(45)表示多智能体编队系统处于弱通讯环境中的协同跟踪控制律,确保系统稳定。而多智能体编队系统的模型为高阶非线性系统,于是所设计的控制律为n阶非线性系统的追踪控制律,包含给定的常系数、更新律以及跟踪误差。对于仿真验证而言,给定二阶系统,即n=2,结合领航者动力学模型、初始设置的参数,就可以得出具体的控制律:
(46)
将式(44)和式(45)代入式(43),可得
(47)
3 稳定性分析
针对系统模型式(3),所设计的分布式自适应跟踪控制律和参数自适应更新律,能够使多智能体编队系统跟踪期望的指定位置,同时保持一致。在满足假设1和假设2的条件下,为了验证所设计的控制律在多智能体系统跟踪和保持协同过程中系统的稳定性,构造整个多智能体编队系统的二次型函数为
VN(t)=Vi,1(t)+Vi,2(t)+Vi,3(t)+…+Vi,n(t)=
(48)
式(48)对时间求导,可得
(49)

(50)
式中,ck>0(k=1,2,…,n)。

图2 障碍物、智能体以及目标之间的受力关系图Fig.2 Diagram of the force relationship among obstacle, agent and target
(51)
式中,多智能体编队系统所受的合力为0,则多智能体之间的队形保持不变,而且编队系统避开障碍物,同时在完全周期性间歇情形下实现跟踪的目的。在跟踪和队形保持过程中,智能体之间需要实时进行信息的传递,而在受限状态(弱通讯)下,即信号时强时弱,导致通信受阻难以完成跟踪与队形保持任务,而且极易发生碰撞。因此,本文设计了扰动补偿控制律,能够使多智能体编队系统在受限状态下依旧保持跟踪效果和恒定队形。
4 仿真实验
在本节中,采用5个智能体作为被控对象构成多智能体编队系统,其中包含1个领航者(编号为5)和4个跟随者(编号为1, 2, 3, 4)。每个智能体结构和尺寸都相等,即是同构的。同时,每个智能体具有相同的运动特性,包含相同的偏航角和相对位置;这5个智能体在平面内运动,且其通讯是顺畅的,拓扑结构示意图如图3所示。
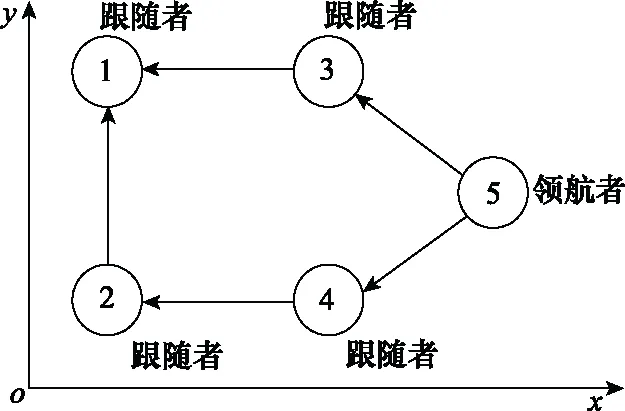
图3 多智能体系统拓扑结构示意图Fig.3 Structure schematic diagram of the multi-agent system topology
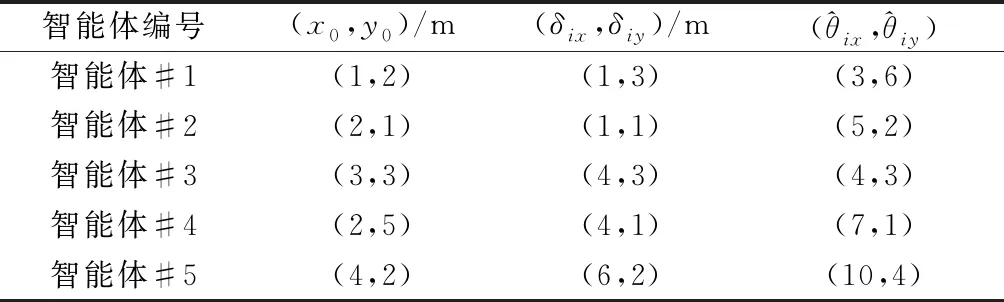
表1 5个智能体的初始位置,期望指定位置以及参数估计值
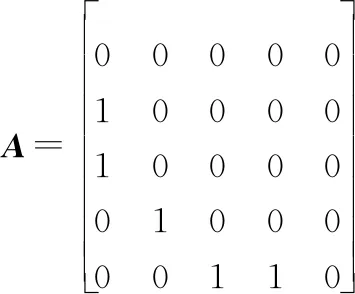
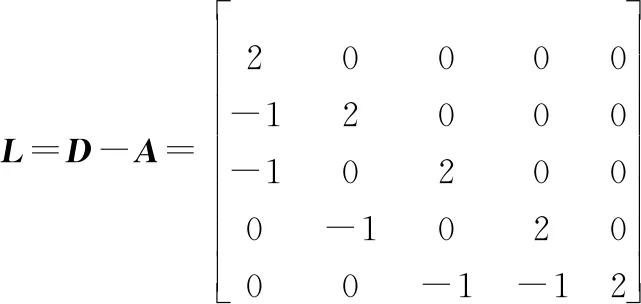
由第1.1节图论可知,邻接矩阵A,度矩阵D以及拉普拉斯矩阵L,其关系为
L=D-A
(52)
同时,结合第1.1节,图3以及式(52),可得

4.1 收敛性分析
为了验证在弱通讯情况下所提方法在多智能体编队追踪过程中的收敛性,基于多智能体的系统模型和领航者的动力学模型,结合自适应反推技术,采用5个智能体进行仿真实验,其结果如图4~图6所示。

图4 多智能体系统前行速度误差曲线Fig.4 Forward speed error curve of the multi-agent system

图5 参数误差曲线Fig.5 Curve of parameter error
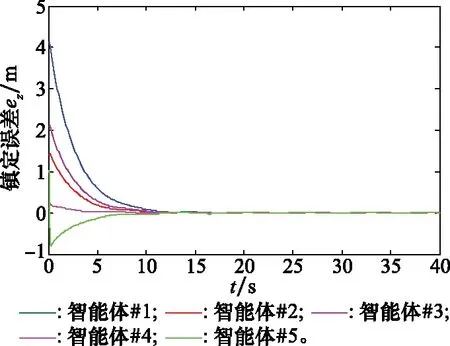
图6 镇定误差曲线Fig.6 Curve of stabilization error
图4给出了多智能体系统前行速度误差曲线。由图4可知,随着时间的变化,曲线大致呈现先缓慢减小后趋于稳定的状态。这是由于每个智能体从不同的位置出发,各自以时变的参考轨迹运动,跟踪各自期望的指定位置。在每个智能体跟踪上各自期望的指定位置前,每个智能体与期望指定位置之间的相对速度逐渐缩小,相应智能体前行速度误差也相应减小,当智能体跟踪上期望的指定位置时,此时指定期望位置也在运动,但是智能体的实际位置与指定的期望位置之间保持恒定的距离。因此,智能体的前行速度误差基本接近0,并保持这种速度运动,协同达到一致运动的目的。在10 s之前,智能体#3和智能体#4曲线下降速度快,而智能体#5缓慢上升,这是由于其起点位置不同,而且初速度也不同,这使得每个智能体与期望的指定位置存在速度差。速度差最大为智能体#4,速度差最小的是智能体#5。在10 s之后,每个智能体前行速度误差基本趋于0,也就是每个智能体已跟踪上各自的期望指定位置,并保持一致运动。
图6给出了系统镇定误差曲线图。随着时间的变化,该曲线大致呈现先缓慢下降后趋于稳定状态的趋势。在5个智能体跟踪期望的指定位置过程中,所提方法能够实现快速有效的跟踪,并使得5个智能体达到一致性。本文所采用的核心技术是反推技术,而反推技术在求解控制律过程,每一步均会设定镇定误差,逐步递推,然后得到最终的控制律。由图6可知,智能体#1~智能体#3的镇定误差曲线逐渐缓慢下降,这说明其在跟踪期望的指定位置的过程先于智能体#4和智能体#5。智能体#4以非常缓慢的趋势逼近期望指定位置,镇定误差变化很小,说明该智能体在跟踪期望的指定位置过程中很平稳。然而,智能体#5曲线变化比较大,先是瞬间下降后缓慢上升至稳定状态,因为智能体#5作为领航者,其速度比智能体#4稍微小点,但比其他智能体均大,在跟踪过程中需要保持队形的一致性,因此该曲线变化趋势明显。
4.2 跟踪效果分析
为了进一步验证所设计分布式自适应一致跟踪方法的有效性,采用同样的仿真环境和相同的初始条件,对5个智能体编队系统进行跟踪效果分析,如图7~图10所示。

图7 多智能体系统在x方向的跟踪误差曲线Fig.7 Tracking error curve of multi-agent system in the x direction

图8 多智能体系统在y方向的追踪误差曲线Fig.8 Tracking error curve of the multi-agent system in the y direction
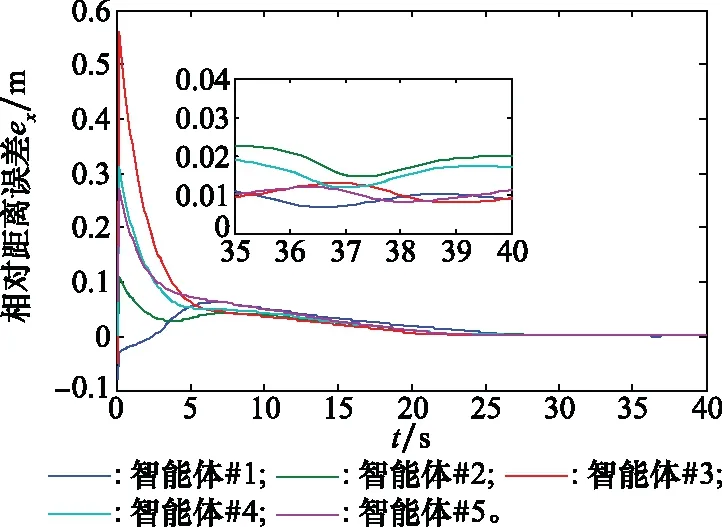
图9 多智能体系统在x方向的相对距离误差曲线Fig.9 Relative distance exerror curve of the multi-agent system in the x direction

图10 多智能体系统在y方向的相对距离误差曲线Fig.10 Relative distance error curve of the multi-agent system in the y direction
图7给出了多智能体系统在x方向的追踪误差曲线。随着时间的变化,该曲线呈现正弦波的趋势。5个智能体编队系统从不同起点以时变的参考轨迹运动跟踪期望的指定位置并保持一致运动,在此过程中分为跟踪阶段和保持阶段。因此,在6 s之前,该曲线处于分离状态,这说明5个智能体以不同的初速度、偏航角以及控制参数进行运动,跟踪指定的期望位置;通过调节系统的参数θ,进而实现不同的虚拟控制,使得每个智能体均能按照时变的参考轨迹跟踪指定的期望位置。在6 s之后,该曲线呈现重合后正弦波的趋势。这说明5个智能体在前进方向实现了跟踪后保持一致运动,采用的自适应协同跟踪算法可以实时控制每个智能体在x方向的速度、偏航角以及系统的参数,实现对多智能体系统协同跟踪目的。
图8给出了多智能体系统在y方向的跟踪误差曲线。随着时间的变化,该曲线呈现从分离状态到重合状态的波动趋势。同样地,5个智能体编队系统在平面中以不同的速度和偏航角开始运动,然后按照时变的参考轨迹运动,追踪各自期望的指定位置,形成模型中给出的五边形队形,并保持该队形继续运动。在此过程中,同样分为跟踪和保持一致性两个阶段。在10 s之前,5个智能体从不同起点运动,由于参考的轨迹是正弦变化的路径,在y方向有相应的运动,5个智能体的追踪误差曲线有较大的变化,这是由于每个智能体在追踪过程中出现通讯能力弱的情况,基于反推技术的自适应控制算法能够使得每个智能体较快调整各自在y方向的速度和偏航角,使其尽快按照时变参考轨迹追踪期望的指定位置,实现跟踪目的。在10 s之后,5个智能体已跟踪到期望的指定位置并形成模型中的五边形队形,然后保持该队形运动,其在y方向的路径跟踪误差为0,实现了较好的队形保持目的。
图9给出了多智能体系统在x方向的相对距离误差曲线。随着时间的变化,该曲线呈现先快速下降,然后缓慢下降至稳定状态的趋势。5个智能体从不同起点出发,以不同速度和偏航角跟踪期望的指定位置,由于5个智能体的初速度均不相等,尤其领航者(智能体#5)速度较大,智能体#1~智能体#3的速度较小,智能体#4的速度最大,导致5个智能体跟踪过程出现不等的相对距离差,智能体#2~智能体#4出现快速下降,而智能体#1出现较为缓慢的上升,之后5个智能体均跟踪已确定的期望指定位置直至达到稳定状态,这是由于基于反推技术的自适应控制方法使得以参考轨迹快速跟踪期望的指定位置,之后保持一致运动。因此,在10 s之前,5条曲线依次呈现不同的下降和上升的趋势,直至35 s之后,曲线保持稳定,实现5个智能体编队系统跟踪和保持一致性的目的。
图10给出了多智能体系统在y方向的相对距离误差曲线。随着时间的变化,该曲线呈现快速下降后快速达到稳定的趋势。5个智能体编队系统开始从不同位置以不同速度按照时变的参考轨迹运动,5个智能体在完成编队跟踪期望的指定位置和保持五边形的队形之余,还需要使得5个智能体中任意两个智能体在通讯能力差的情况下保持之间的相对距离大于安全距离,实现在跟踪过程中不发生碰撞。因此,在y方向曲线会呈现不同速率的下降趋势,而后在自适应控制算法的控制下,实现稳定状态,也就是曲线呈现水平趋势。在10 s前,智能体#3的速度相对比较大(V3=1.0 m/s),快速跟踪期望的指定位置,在控制参考的调整下,曲线变化趋势大;智能体#5作为领航者,其速度较大(V5=1.2 m/s),在跟踪过程保持较为平稳的追踪,曲线变化趋势平缓。在10 s之后,5个智能体在y方向相对距离误差均为0,实现一致跟踪的目的。
4.3 避障分析
在本节中,基于避障模型式(11),采用相同的初始条件和相同的实验环境,仿真结果如图11和图12所示。
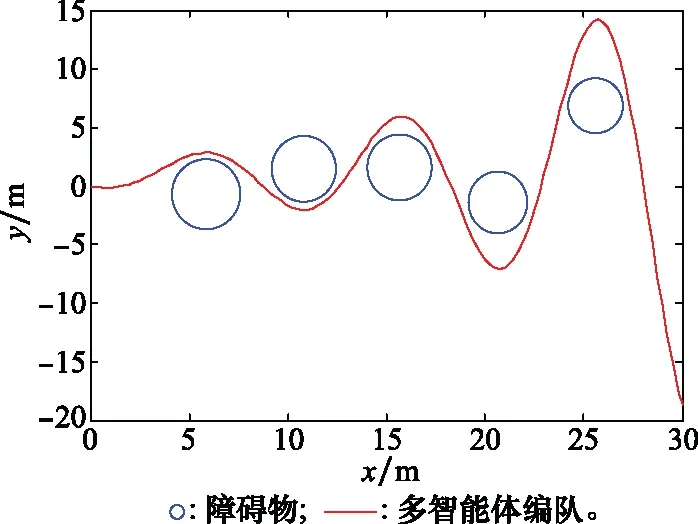
图11 多智能体避障曲线Fig.11 Collision avoidance curve of the multi-agent

图12 多智能体避障过程相对距离误差曲线图Fig.12 Relative distance error curve of the multi-agent collision avoidance process
图11给出了多智能体在平面运动的避障图。由图11可知,随着时间的变化,该曲线呈现以最优轨迹避开障碍物波动的趋势。在多智能体跟踪过程中,每个智能体由不同的起点位置以时变的参考轨迹跟踪期望的指定位置,然后保持既定的编队队形运动。在此过程中,会遇到障碍物,本文采用人工势场方法进行避障,其核心为智能体与障碍物之间的距离决定彼此远离或者靠近,从而达到避障目标。在5 s之前,智能体逐渐靠近障碍物,其相对距离减小,产生的斥力大于引力,使得多智能体稍微远离障碍物而进行运动。同理,当智能体所示斥力小于引力,则相互之间靠近,呈现一种以最优轨迹避开障碍物运动。
图12给出了多智能体避障过程相对距离误差曲线。由图12可知,随着时间变化,该曲线首先快速上升,然后快速下降到很小,之后缓慢趋于稳定状态。这是由于多智能体编队系统在刚开始逐渐靠近障碍物时,其合力为斥力,同时还继续跟踪期望的指定位置,从而使得其相对距离误差变大;随后,当其距离逐渐增大,合力表现为引力;最后,智能体与障碍物之间的引力和斥力等大反向,达到动态平衡,其曲线处于水平状态。
4.4 讨论
为了验证本文所提出算法的追踪效果,将与滑模控制(sliding mode control, SMC)方法,自适应控制方法(adaptive control method, ACM)进行仿真对比分析,采用相同的初始条件和假设,其结果如图13所示。
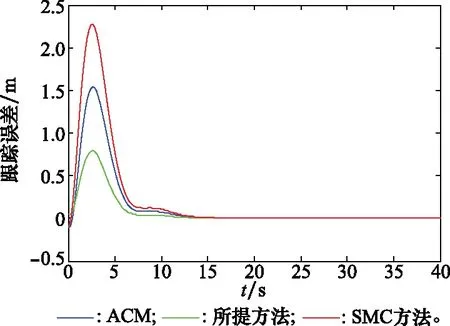
图13 多智能体跟踪误差曲线Fig.13 Tracking error curve of the multi-agent
图13给出了多智能体跟踪误差曲线。在所提方法、ACM以及SMC方法的作用下,随着时间的变化,曲线先快速上升到最高峰值,然后迅速下降,最后缓慢趋于稳定状态。这是由于智能体在不同的初始位置以不同的角度开始运动,根据参考轨迹跟踪期望的指定位置,在峰值之前,曲线迅速上升,这是由于每个智能体以时变的轨迹快速跟踪期望的指定位置,智能体与期望的指定位置之间的距离相距较远,这使得其跟踪误差较大。当该曲线从峰值到水平位置时,3种方法均迅速下降后缓慢上升至水平位置,这是由于智能体即将接近各自的期望指定位置,速度减小,对应的相对距离误差也随之减小至0,则实现一致跟踪的目的。然后,所提方法使得多智能体系统的跟踪误差最小,达到稳态所需要的时间最短,ACM对应的跟踪效果次之,SMC方法跟踪效果最差。
为了进一步直观说明3种方法的跟踪效果,对其追踪过程中的稳态误差和稳定时间进行对比分析,如表2所示。

表2 3种方法跟踪效果指标对比
由表2可知,本文所提方法能够使多智能体在弱通讯情形下具有良好的追踪效果。
5 结 论
本文基于反推技术,提出分布式自适应一致跟踪控制方法,达到多智能体在弱通讯的情况能够实现有效的跟踪和保持一致运动的目的。5个智能体作为被控对象构成多智能体系统,这5个智能体均携带有无线传输系统,在复杂环境下,信号传输能力存在弱化情况。基于此,本文将5个智能体系统模型分解为5个子系统进行虚拟控制律设计,避免非线性系统的处理所带来的困难,从而实现最终的控制律设计,实现对5个智能体系统进行有效控制。主要结论和存在问题如下:
(1) 所提出的多智能体分布式自适应方法能够使5个智能体在平面x和y方向进行有效追踪,同时保持镇定误差收敛于很小的领域内,使多智能体编队系统在弱通讯情形下完成跟踪任务,并以最优轨迹避开障碍物并保持队形恒定;
(2) 基于反推技术,提出自适应一致跟踪控制律,能够使多智能体在整个跟踪过程具有较好的稳定性,误差收敛速度快;
(3) 尽管所提出的方法能够使多智能体编队系统在弱通讯情形下具有较好的追踪效果,但本文是将弱通讯情况作为系统的扰动进行处理的,没有分析其内部的通讯机理,也未能建立精确的多智能体模型。因此,下一步工作将对弱通讯情况下的传输机理进行深入分析,建立准确的多智能体模型,进行跟踪控制。
