基于LMI算法的永磁同步电机混沌控制
2021-01-25李洋洋魏海峰李垣江
李洋洋,张 懿,戴 磊,魏海峰,李垣江
(1. 江苏科技大学 电子信息学院,镇江 212003;2. 江苏舾普泰克自动化科技有限公司,镇江 212003)
0 引 言
永磁同步电动机作为一种典型的非线性系统,凭借其转动惯量小、工作效率高、动态响应速度快等优点,成为了非线性系统运动行为研究的焦点对象。但在永磁同步电机运动系统中不规则行为的存在是不可避免的,这种不规则运动在过去一度被研究者认为是随机的外界干扰、又或是系统故障[1-3]所造成的, 这种局限性的认识在很长的一段时间内束缚着研究者解决“不规则运动”问题的思路。以至于使得电机传动系统的高性能发展受阻,体现为永磁同步电机转速、转矩的间歇性振荡,控制性能不稳定和不规则的电磁噪声等不规则运动,即是永磁同步电机运行系统中所存在的混沌行为[4-5]。永磁同步电机系统的混沌行为不仅影响系统运行的稳定性、安全性,甚至会危害其负载系统[6]。这种典型的非线性行为不能依靠传统的线性控制方法来抑制或消除,因此对永磁同步电机混沌行为及其控制的研究具有非常重要的理论和实际价值。
为了抑制永磁同步电机系统中的混沌行为,国内外文献中已有许多分析和控制的方法。文献[7-10]提出了电机的无量纲数学模型,引入Lyapunov稳定性判据,分析了磁感应电机运行系统的Hopf分岔条件,为研究混沌行为的学者提供了电机系统进入混沌状态强有力的分析手段。文献[11-12]在此基础上基于d,q旋转坐标系研究了永磁同步电机的物理模型,并建立了其混沌模型,通过分析系统平衡点的运动轨迹,发现系统参数的变化会对永磁同步电机运行系统的稳定性造成很大的影响。文献[13]打破常规,自主地引进新的参数,搭建了永磁同步电机数学模型,并在该模型的基础上研究了运行系统产生分岔、进入混沌的条件。文献[14-16]基于非线性闭环控制理论提出了一种误差反馈混沌控制算法,设计误差反馈学习算法并利用梯度下降原理对系统神经元进行学习,实现实时预估系统干扰,进而对系统进行误差补偿,在一定程度上解决了系统跟踪性能差的问题。针对参数不确定的永磁同步电机混沌系统,文献[17-19]基于自适应控制理论提出了一种参数不确定电机系统的混沌控制策略,设计了自适应控制算法用于对不确定的系统参数在线修正,文献通过仿真结果并利用Lyapunov稳定性定理,证明了控制策略的有效性。文献[20-21]研究了线性矩阵不等式(以下简称LMI算法)在非线性动力学系统中的应用,为了解决电机运行系统快速性和鲁棒性之间的矛盾问题,引入了LMI算法将系统混沌控制问题转换成了目标最优求解的问题。
本文基于LMI算法在分析永磁同步电机运行系统混沌现象的基础上,通过构造带有补偿项的滑模函数,设计了一种简捷、快速的动态滑模补偿控制算法,实现对永磁同步电机混沌运动行为的有效抑制或消除。
1 混沌状态下永磁同步电机的数学模型
将直角坐标系下用来描述永磁同步电机模型的电压平衡方程和转矩平衡方程联合,并经坐标转换,得到d,q旋转坐标系下永磁同步电机的微分方程数学模型如下:
(1)
以上模型中的变量及电机固有的系统参数说明如表1所示。
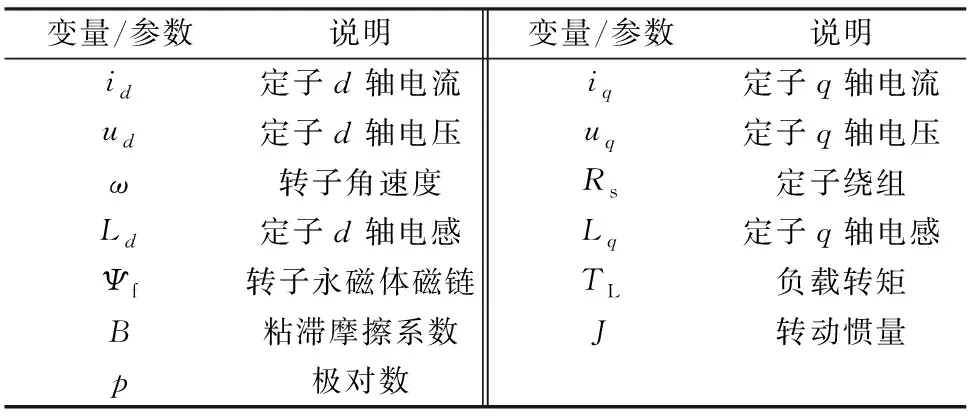
表1 永磁同步电机参数
对式(1)进行仿射变换和时标变换,即:

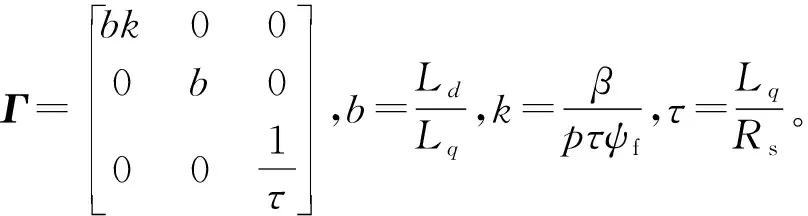
上述的仿射变换和时标变换均是线性变换,变换后的永磁同步电机的方程仍是一个多变量的非线性微分方程。
本文讨论均匀气隙的永磁同步电机,即Ld=Lq。综合上述条件,式(1)可用微分方程组表示:
(2)

2 永磁同步电机的混沌现象分析
为了简化分析,对上文中得出的永磁同步电机微分方程进行变化,令:
式(2)可写为:
(3)
由式(3)可见,永磁同步电机是一种典型的强耦合非线性动力学系统。在实际的工程环境下,这种多参数的非线性系统参数及状态会因为受到外界干扰等因素的影响而容易发生变化,参数变化至一定的范围内,会使得电机运行系统产生混沌运动行为。本文主要针对永磁同步电机在气隙均匀的环境中工作,研究运行系统在突然断电瞬间的动力学特性。断电是指忽略外部影响,永磁同步电机在空载状态下运行一段时间后突然断电,此时就可认为电机的各项外部输入均为零。断电的瞬间会引起系统参数的相应变化,进而使得系统产生混沌运动,这种混沌运动会造成突发性的病态机电振荡现象,由此会对电机转子造成极大的破坏,缩短电机的使用寿命。
选定系统初值iq(0)=1,ω(0)=0,id(0)=0。令系统参数γ=19.5,b=1,利用MATLAB仿真软件研究系统随参数σ变化而发生的状态以及相的变化,仿真发现,随着σ由小变大,系统会从稳定状态进入混沌状态。为了证明此情况,电机在突然断电的情况下,即ud=uq=T=0,特取σ=2.6,σ=3.1和σ=6.56进行分析。
系统参数σ=2.6时,图1的系统时域波形图表示,系统的状态ω,id,iq分别从初始的小幅振荡到很短的时间内就能够渐趋平稳。图2的系统相图则表明了系统始终围绕一个焦点做规则的周期运动,并且最终稳定于此焦点。因此,永磁同步电机运行系统在参数σ=2.6时是稳定工作的。
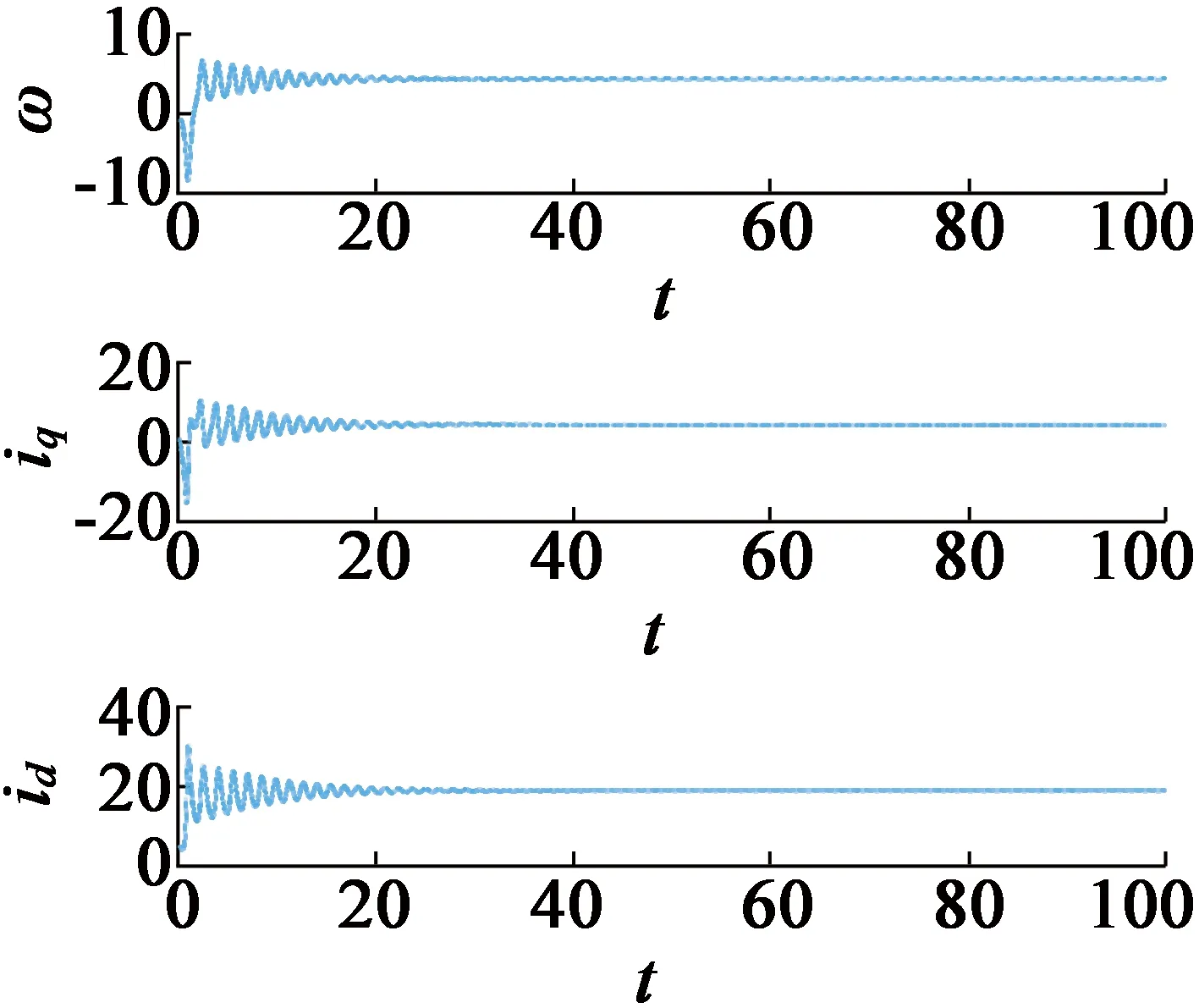
图1 σ=2.6的系统时域图
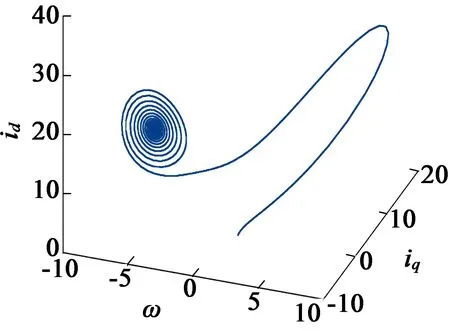
图2 σ=2.6的系统相图
系统参数σ=3.1时,图3的时域波形图表示,系统的状态ω,id,iq在长时间内出现无规则且不衰减的振荡。图4的系统相图表明,系统出现两个不稳定的正负焦点,相轨迹时而围绕正焦点旋转,时而围绕负焦点旋转,表现为整体稳定而局部不稳定,即系统进入混沌运动行为。
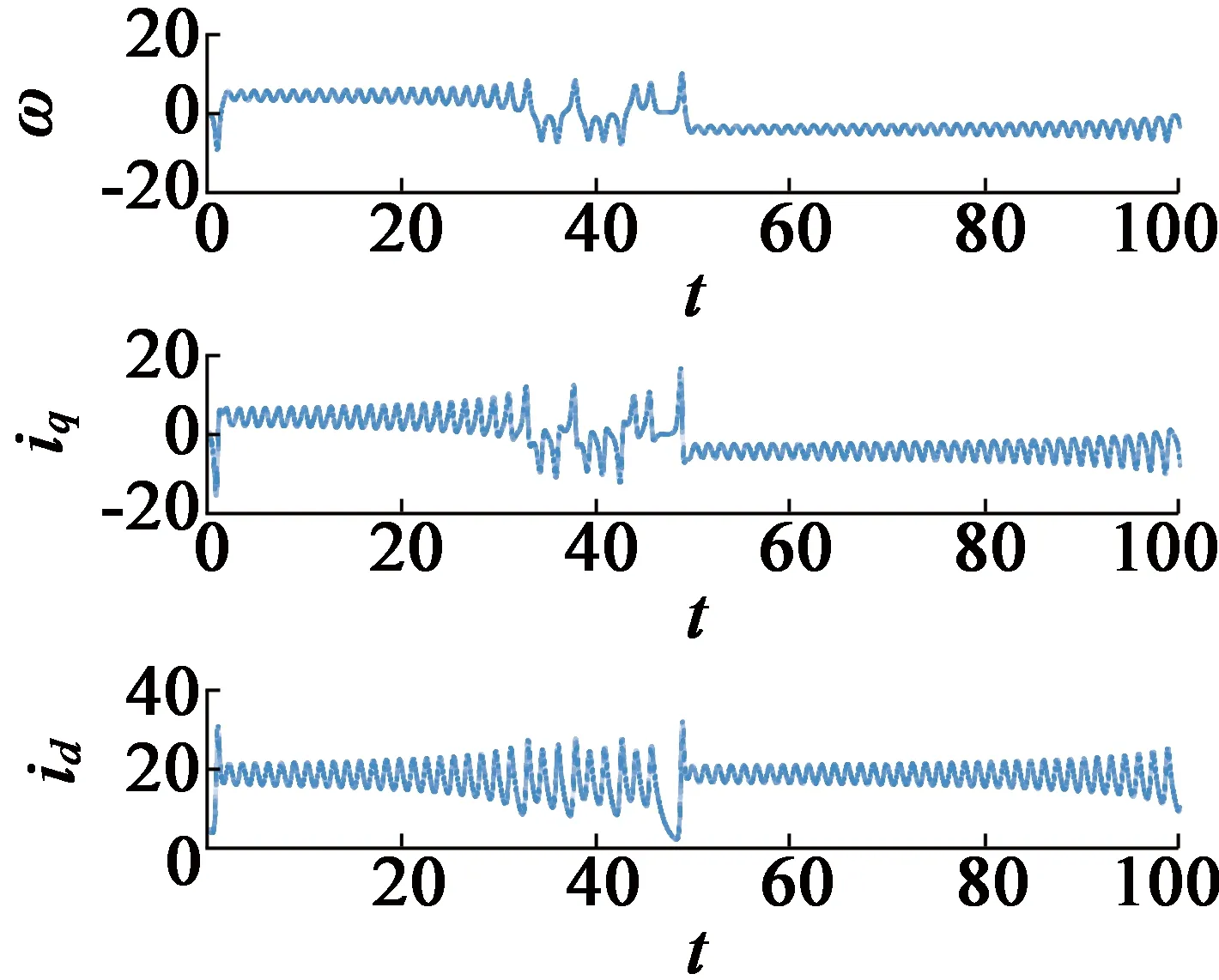
图3 σ=3.1的系统状态图
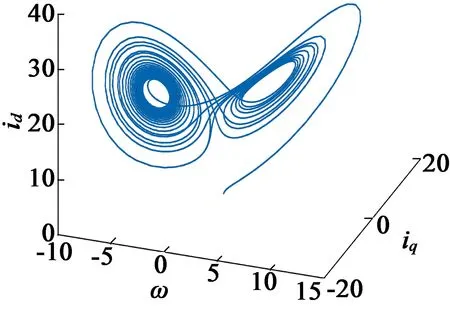
图4 σ=3.1的系统相图
系统参数σ=6.56时,图5的时域响应图及图6的系统相图表明系统已完全进入混沌状态。
综上得出,永磁同步电机的系统参数σ=2.6时,系统处于稳定状态。当σ开始增大,取σ=3.1时,此时系统开始产生混沌;当参数σ继续增大,σ=6.56时,系统已经完全处于混沌状态,系统的相图呈现出一片紊乱。由上述对永磁同步电机动力学特性的分析可知,参数σ取较小值时有利于电机的稳定运行,可以延长永磁同步电机的使用寿命。
为了提高运行系统的稳定性,抑制永磁同步电机的混沌运动行为,本文基于LMI算法提出一种动态补偿滑模控制策略。
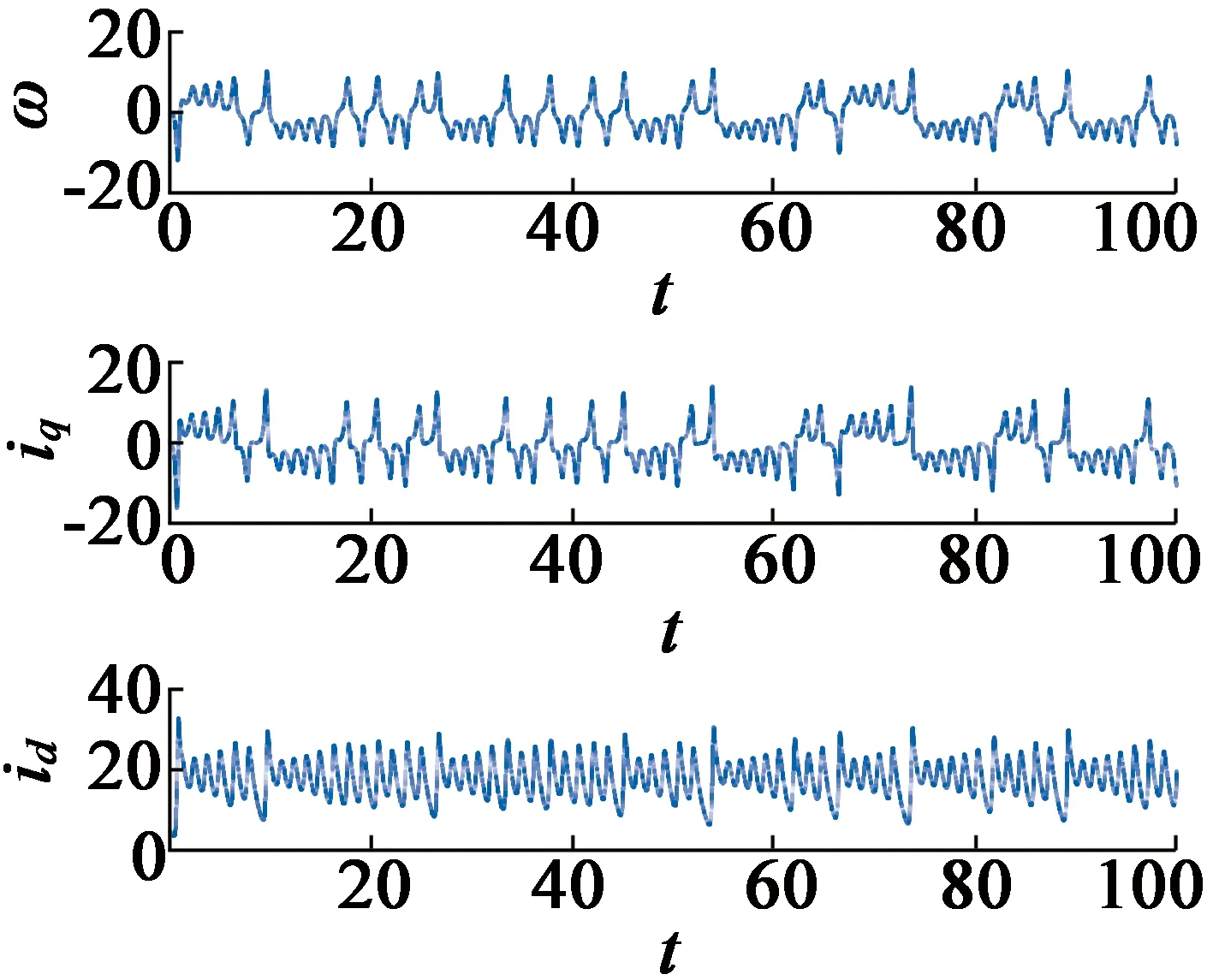
图5 σ = 6.56的系统状态图
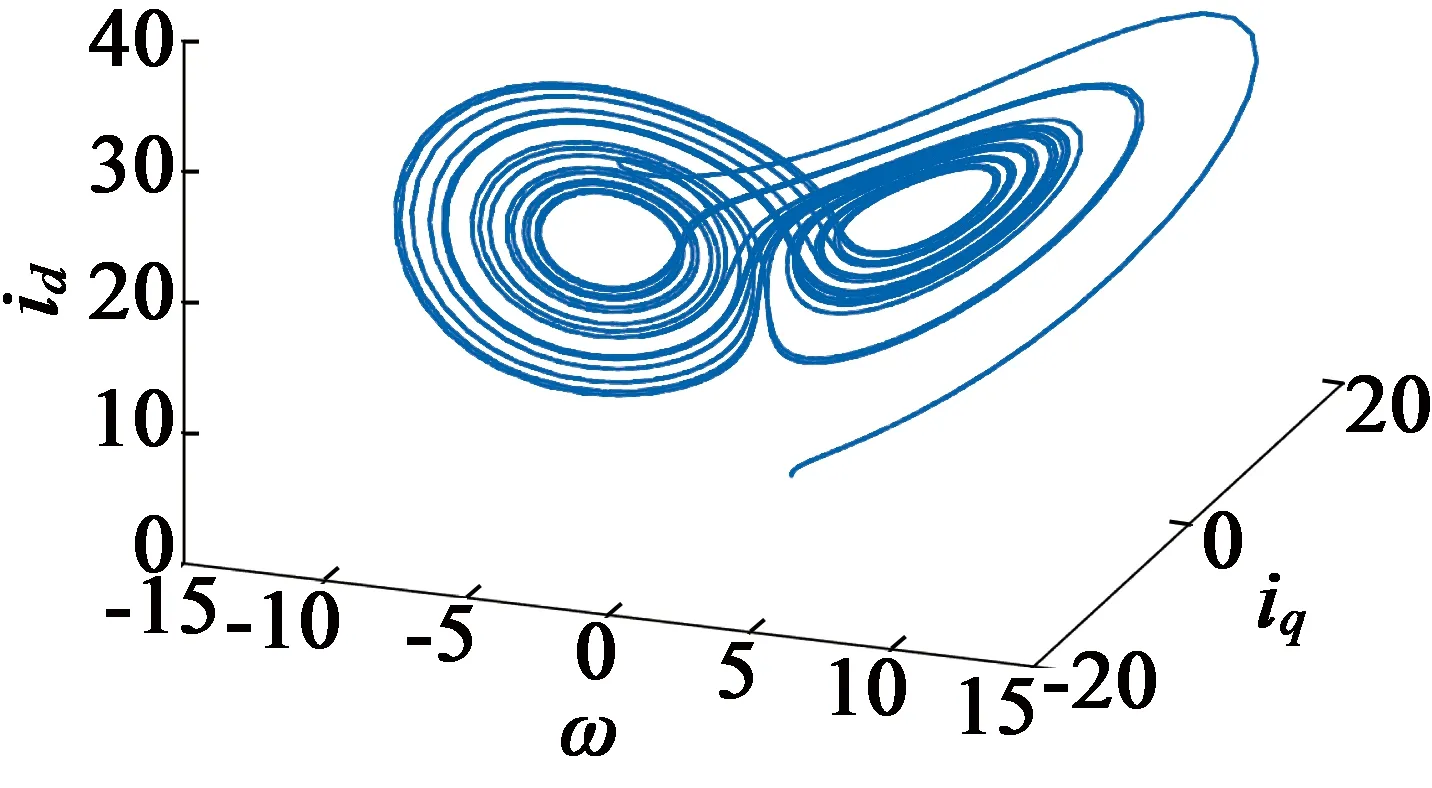
图6 σ=6.56的系统相图
3 基于LMI的动态补偿滑模控制器设计
对系统状态式(3)进行改写,得到式(4):
(4)

已知γ=19.5,令T=0,σ=6.56,并将式(4)改成如下状态空间模型形式:
(5)

u=[u1,u2]为控制输入,A是系统的线性矩阵,B是系统的控制矩阵,f(x)表示系统的非线性。
3.1 动态补偿滑模控制
设计滑模函数:
s=Cx+z
(6)
为了调节闭环系统的节点,补偿算法设置:

(7)
式(6)和式(7)中的C和K都为待求矩阵,需要通过LMI算法求解。
控制律设计:
u=-CAx-Cf(x)-Kx+z-ηs
(8)
取Lyapunov函数,化简得:
sT[CAx+Cf(x)+u+Kx-z]=
sT(-ηs)=-η‖s‖<0
式中:CB=I,η>0。由上面Lyapunov函数可知,满足了滑模到达条件。
化简状态空间表达式(5):
式中:BCf(x)=f(x)模函数满足到达条件,可知存在t>t0时,滑模函数s=0,即z=-Cx。

[A-B(K+C+CA)]x

V(x)=xTx
xT(MT+M)x



由上面的解可知,此线性矩阵不等式系统是可行的,进而滑模函数可以写成:
(9)
以下,将通过仿真来验证此滑模控制系统是稳定的。
3.2 系统仿真图
为了验证动态滑模补偿算法的有效性,对加入控制器后的永磁同步电机系统进行仿真,系统初始状态iq(0)=1,ω(0)=0,id(0)=0;σ=6.56,γ=19.5,此时系统处于混沌状态。在t=20时,加入滑模补偿控制器,仿真图如图7~图10所示。
图7到图9表明,系统在t=20时加入动态滑模补偿控制后,状态id,iq,ω的时间响应均脱离紊乱的混沌态,而迅速稳定于零平衡点处;图10为加入动态补偿的相图,则表明系统轨迹不再是围绕两个焦点无规则运动,而是最终收敛于一个点上。对比图5和图6,并通过仿真说明了本文设计的动态滑模补偿混沌控制算法的有效性。
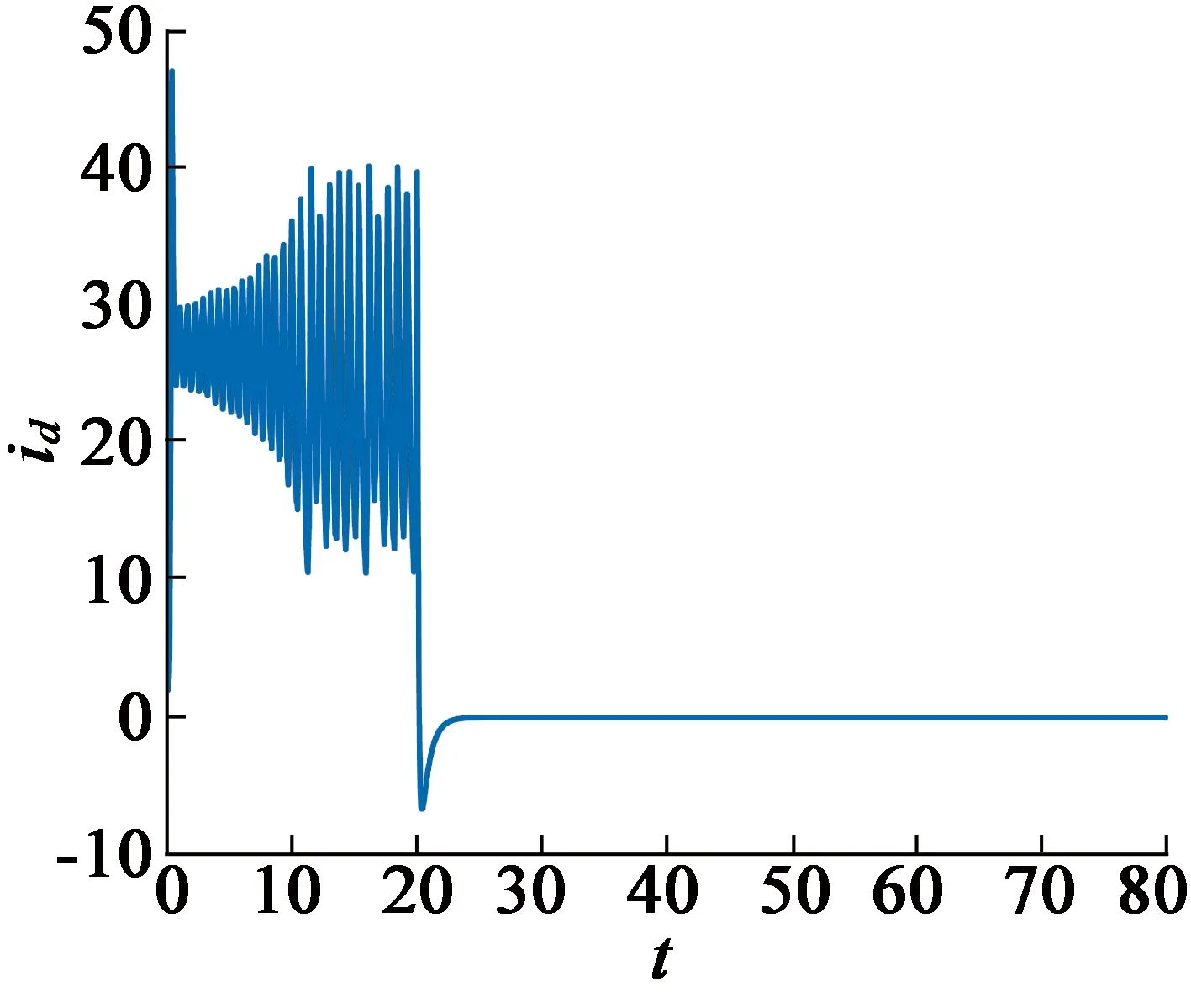
图7 加入动态补偿之后id-t响应图
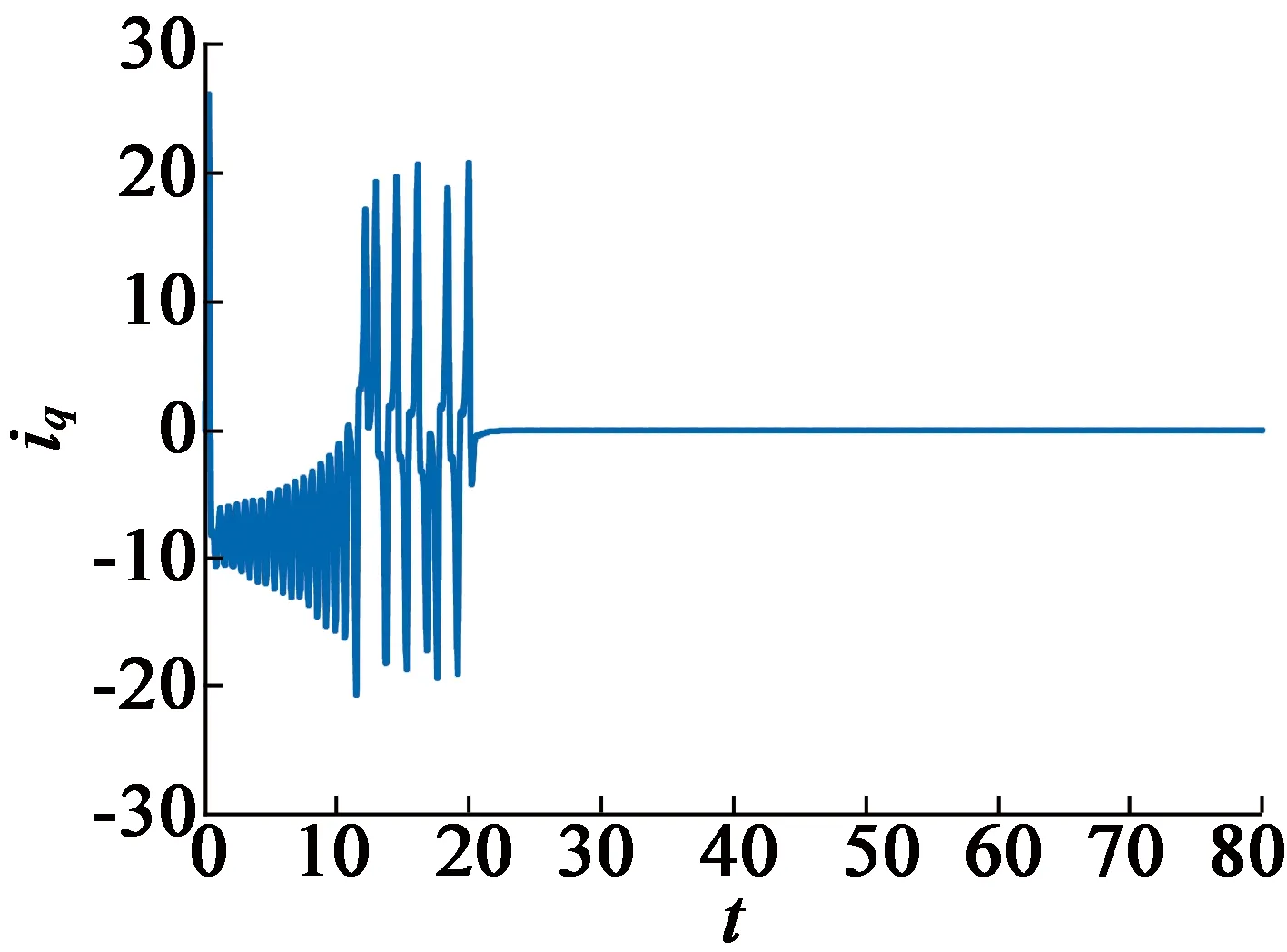
图8 加入动态补偿之后iq-t响应图
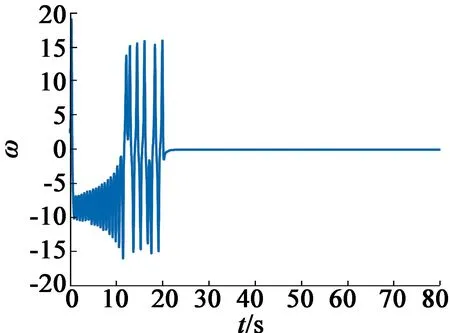
图9 加入动态补偿之后ω-t响应图
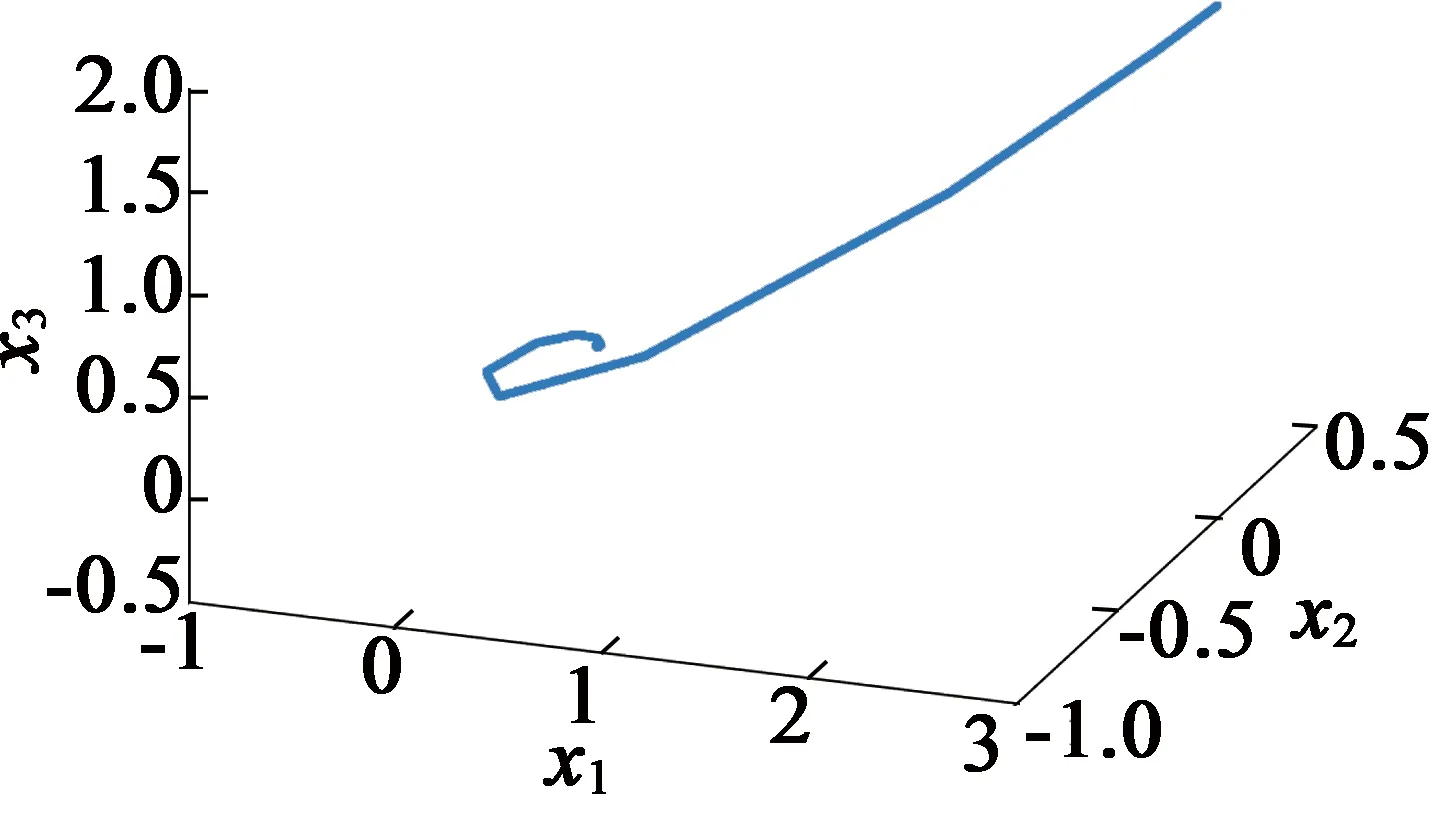
图10 加入动态补偿之后的系统相图
4 结 语
本文通过系列线性变化将永磁同步电机复杂的物理模型转换为一个三阶微分方程表示的无量纲化数学模型,一定程度上减少了系统的参数,方便了对系统性能的分析。
应用定参数分析法,通过改变永磁同步电机的系统参数σ,对永磁同步电机的运行状态进行分析,MATLAB仿真验证了均匀气隙下永磁同步电机在特定的参数范围内会产生不规则电流和转速振荡,进入混沌状态。
为对混沌运行状态下的永磁同步电机进行控制,抑制混沌现象,本文设计了动态补偿滑模控制器,验证了其Lyapunov稳定性,通过LMI算法求解出满足x→0的最优解,仿真实验验证了此方法具有较好的鲁棒性和快速的动态响应特性。
