同步磁阻电机无位置传感器控制研究
2021-01-25牛高产张小波黄奇卉
牛高产,张小波,李 立,黄奇卉
(1.空调设备及系统运行节能国家重点实验室,珠海 519070;2.广东省制冷设备节能环保技术企业重点实验室,珠海 519070;3.珠海格力电器股份有限公司,珠海 519070)
0 引 言
当前,在风机、水泵和通用机械等领域仍主要以低能效的异步电机为主,部分高能效场合采用永磁同步电机,但高性能的永磁体通常含有稀土成分,难以节省能源、降低成本。无永磁体、工艺简单的同步磁阻电机遵循磁阻最小原则,以d轴和q轴的磁阻差异产生磁阻转矩,使电机转动[1]。同时,同步磁阻电机有用料成本低、转子结构稳固、效率高、不存在退磁问题等优点,应用空间广阔。
位置传感器受本身性能、安装成本和安装环境的限制,应用有限;无传感器控制技术作为一种检测电机位置和速度的方法,其降低了电机系统成本,提高了系统稳定性[2]。在设计无位置传感器控制模型时,需要格外注意电机磁链观测器的稳定性[3]。通常永磁同步电机采用反电动势法获取转子位置信息,而同步磁阻电机无永磁体,在低速运行时传统的反电动势法无法实现同步磁阻电机的高精度控制。文献[4]采用省略低通滤波器的扩展滑模观测器估计电机转子速度和位置,但同步磁阻电机本身转矩脉动大,滑模观测器本身具有抖振特点,势必影响观测效果。文献[5]通过构造锁相环在低速区能获得更好的观测结果,但是利用高频小信号的注入,可能引入高频噪声,易对其它工作区域产生干扰。文献[6]提出利用同步磁阻电机的电流模型和电压模型两种模型观测到的误差,通过修正环节调节电压模型观测的磁链值,使磁链误差趋近于零,该方法虽然能观测到准确的定子磁链,但针对电机电感参数的变化,需要建立查表得到不同工况下的实时电感,工作量繁琐。
本文基于同步磁阻电机的电压模型方程,提出了一种自适应磁链观测器,当电机电感参数随着电流变化时,能够稳定观测磁链值,从而提高同步磁阻电机位置和转速的估测精度,提高系统的鲁棒性。
1 同步磁阻电机在d,q坐标系上的数学模型
在d,q坐标系上,规定同步磁阻电机d轴正方向位于电机没有磁障的方向,q轴与d轴正交,位于磁障上,而且d轴磁阻小,q轴磁阻大。同步磁阻电机数学模型和永磁同步电机的数学模型相似,同步磁阻电机的d轴磁链不存在永磁体磁链,则同步磁阻电机的电压方程:
(1)
(2)
式中:Ld,Lq分别是电机定子d轴和q轴电感。电机转矩方程可表示:
(3)
式中:Te是电机电磁转矩;p是电机极对数。
2 自适应磁链观测器的设计
为了获得无位置传感器控制下的电机转速和电机旋转位置角度,本文主要围绕电机定子磁链的自适应观测展开。电机需要的转速和角度信息由参考模型和自适应模型的观测误差得到。参考模型:
(4)
(5)

(6)

(7)

(8)
通过观测到的磁链误差计算电机角速度和角度的方法有多种[7],本文采用PI控制得到:
(9)
kp,ki和自适应观测器带宽有关,通过电机角速度积分得到角度值:
(10)
3 仿真验证
本文通过MATLAB/Simulink仿真模型验证所设计的观测器性能,搭建的同步磁阻电机矢量控制模型如图1所示。
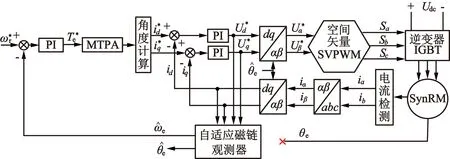
图1 同步磁阻电机矢量控制模型
仿真使用的同步磁阻电机参数如表1所示。
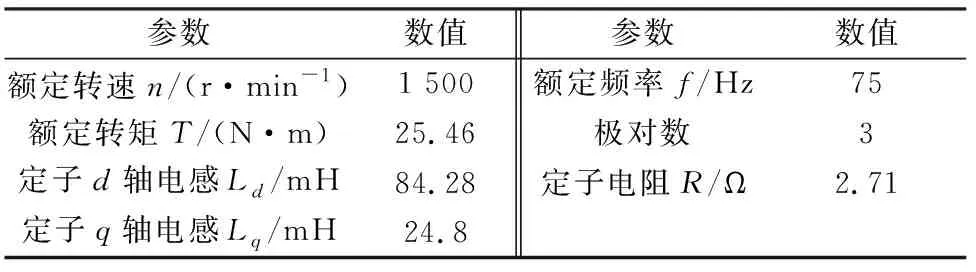
表1 同步磁阻电机实验参数表
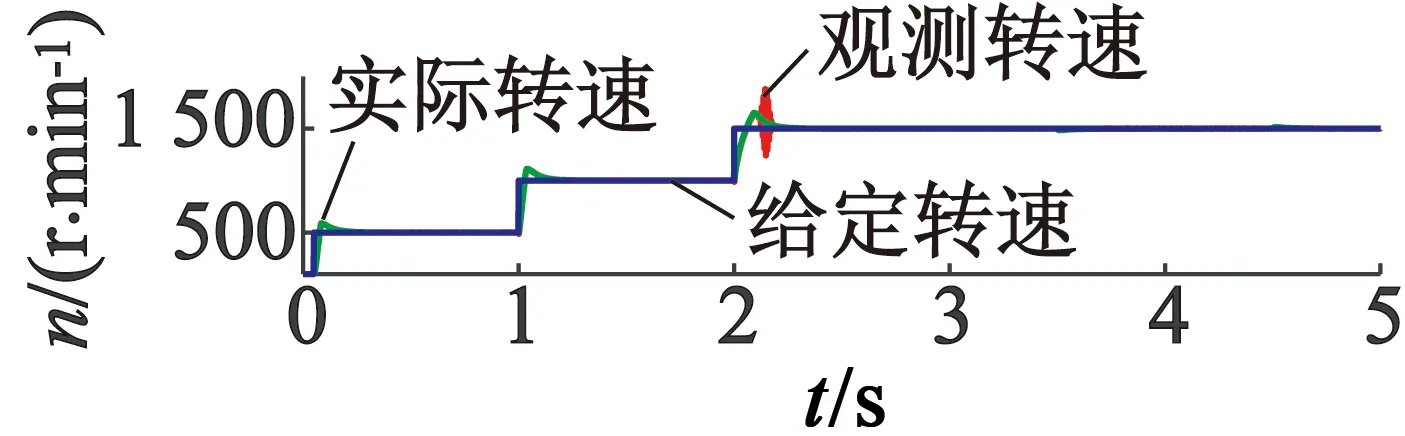
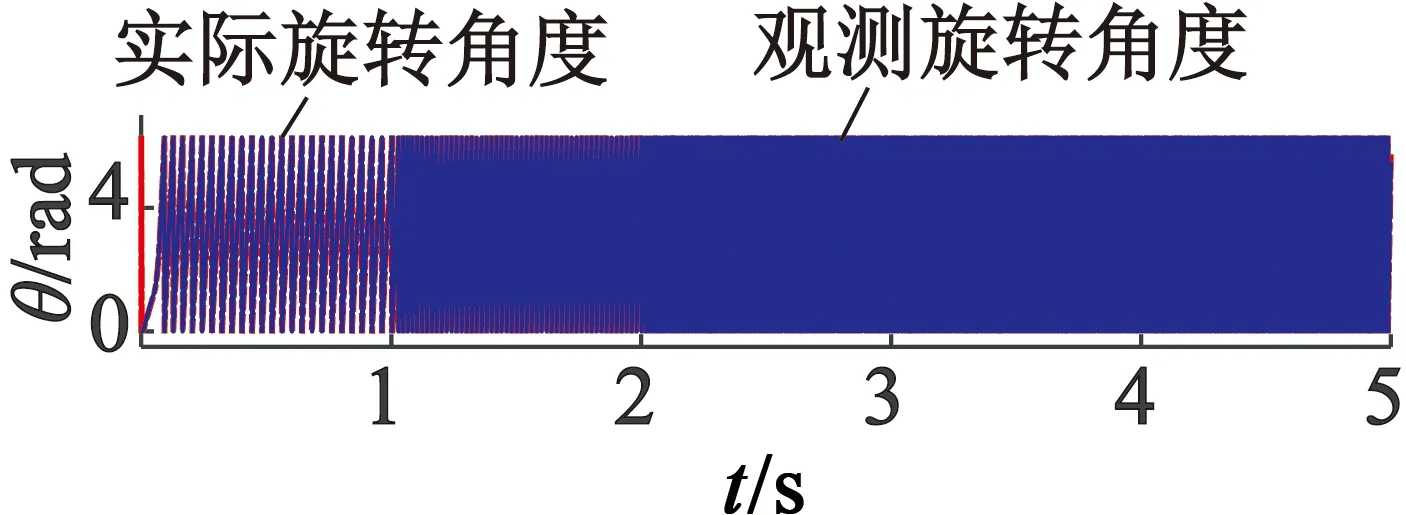
首先,改变电机速度。从零开始加速至500r/min,以500 r/min为一个加速阶段,加速至1 500 r/min。此时,电机运行速度变化波形、转子位置变化波形如图2所示。从图2可以看出,当电机加速时,观测的旋转角度与速度和实际值基本重合,实现电机磁链和位置的精确观测。

(a) 电机转速

(b) 电机位置角度
接着分析该磁链观测器的带载能力。改变电机负载从5 N·m,加载到15 N·m,再加至25 N·m,如图3所示。负载变化时,观测速度和实际速度有较小的超调,但很快达到稳定值。仿真实验验证该观测器性能基本不受负载影响。
(a) 电机转速
(b) 电机位置角度

(c) 电机三相电流
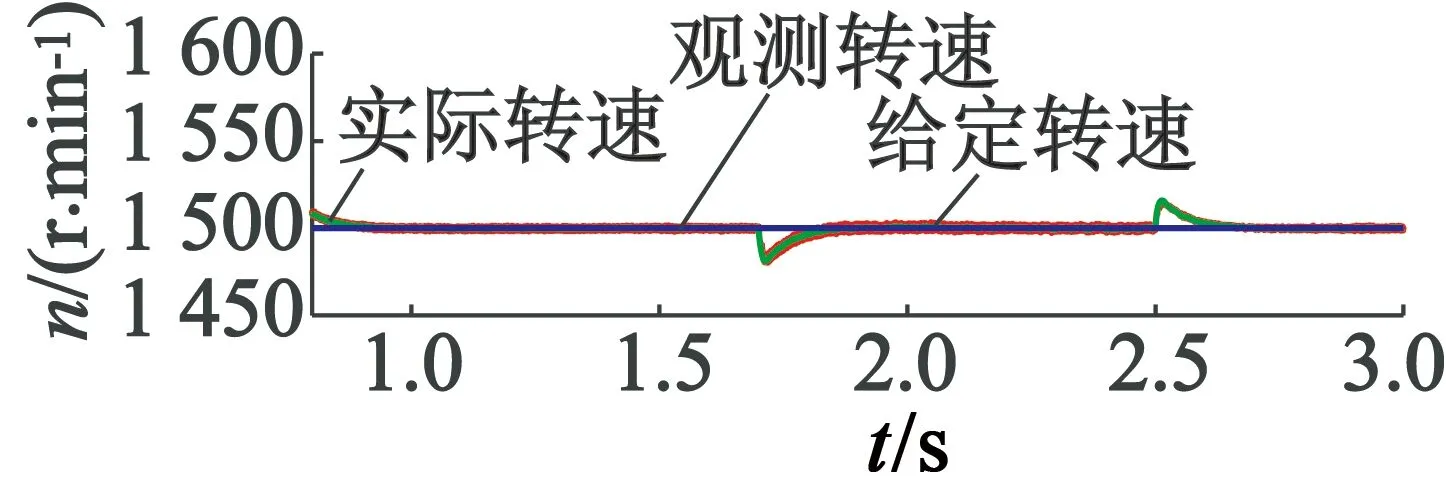
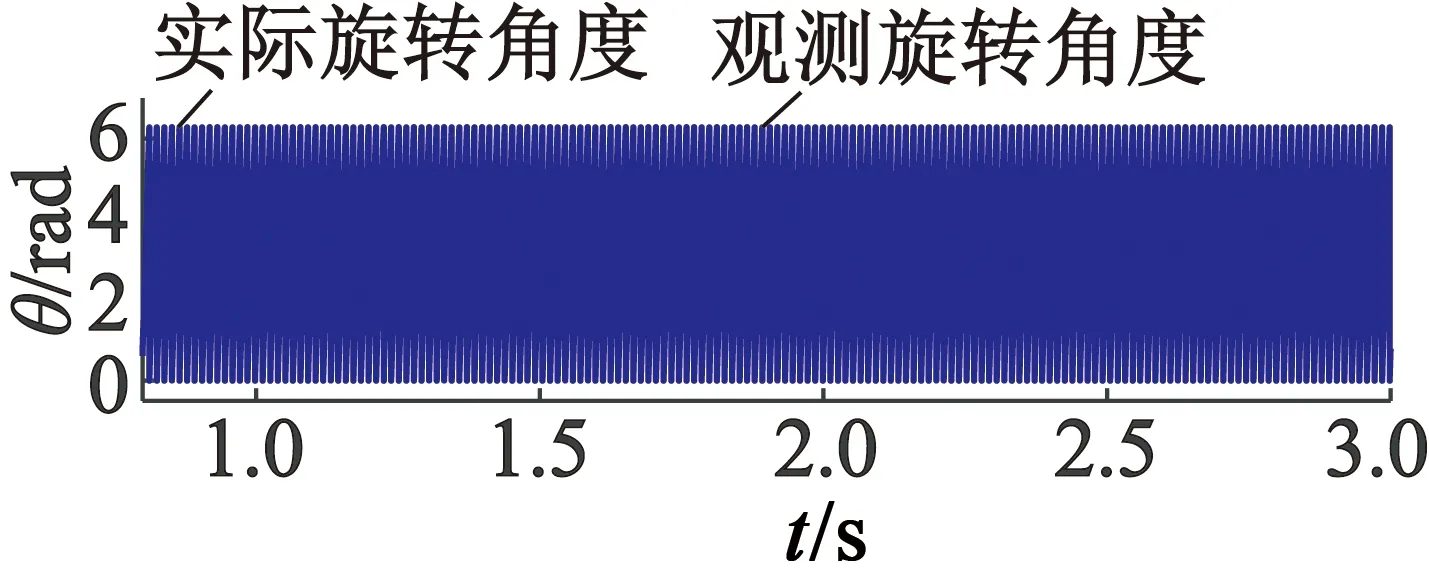
同步磁阻电机的d轴和q轴电感会随着电流的变化而变化,为此,本文进一步验证该观测器的鲁棒性。假设当同步磁阻电机d轴电感变为Ld=100 mH,Lq=30 mH,仿真结果如图4所示。前3 s对应转速变化时的电机转速和角度位置情况,第3 s后对应负载变化时的电机转速和角度位置情况。仿真结果表明,电机d轴和q轴电感发生变化后,除了在电机转速切换至额定转速1 500 r/min时,发生轻微振荡,其他状态下电机均能稳定运行,这说明所设计的自适应控制器具有较强的鲁棒性,当同步磁阻电机d轴和q轴的电感发生较大变化时,观测器仍然能够及时准确跟随。
(a) 电机转速
(b) 电机位置角度
4 实验验证
为了验证本文策略的可行性,实验以自主研发的变频器驱动电机,通过数字信号处理(DSP)芯片TMS320F28034实现数字化和模块化编程,同时连接380 V变频电源柜,采用0~50 N·m对拖加载测试台,具体控制系统实验平台如图5所示。
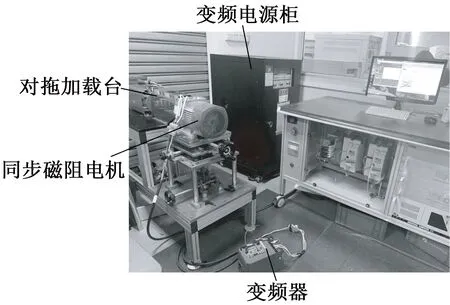
图5 实验平台
同步磁阻电机实验参数如表1所示。
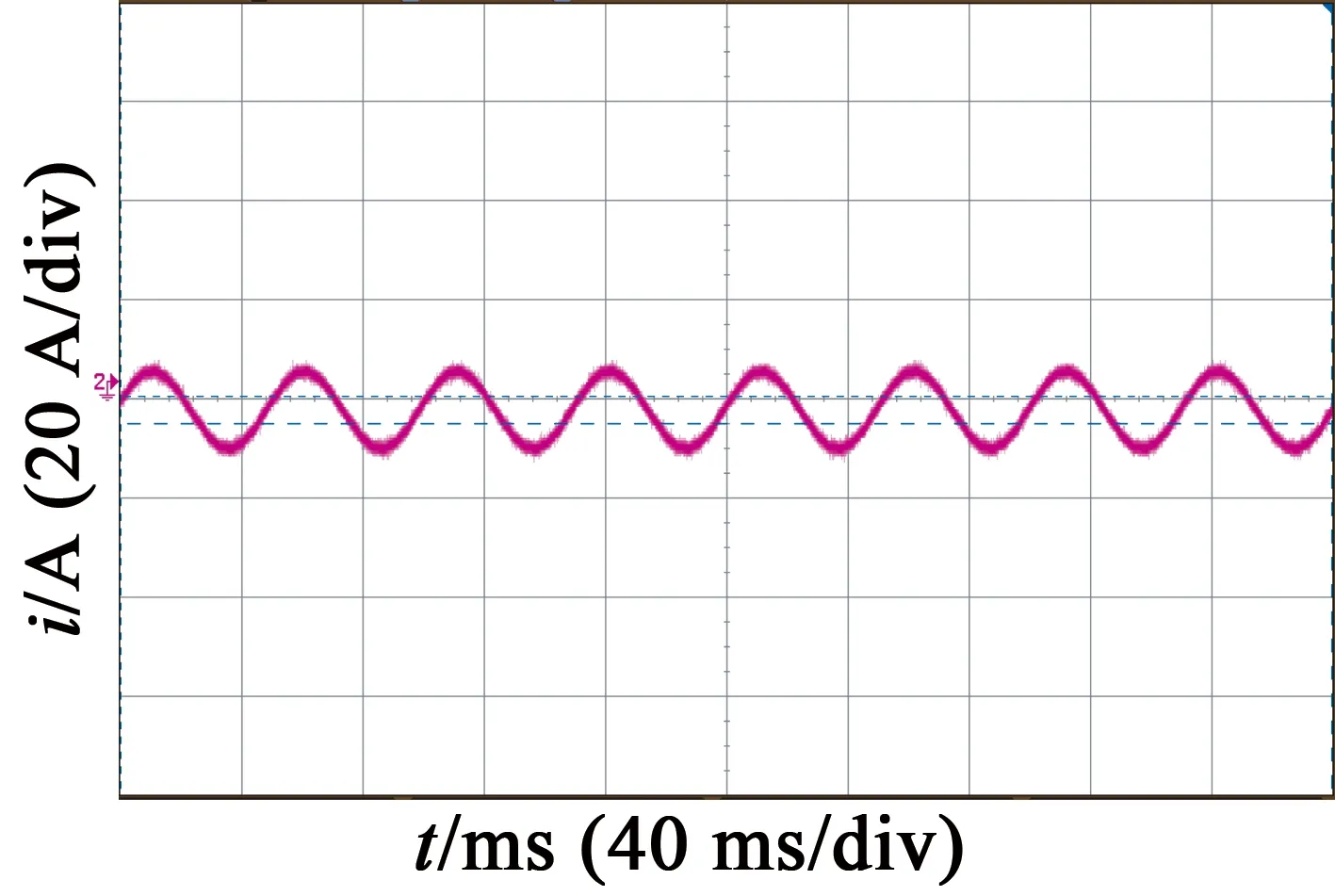
图6是电机运行400r/min、600r/min、900r/min、1 500 r/min时电机带负载运行得到的电机定子相电流波形图。可以看出,电流波形正弦度高,鲁棒性能良好。
(a) n=400 r/min
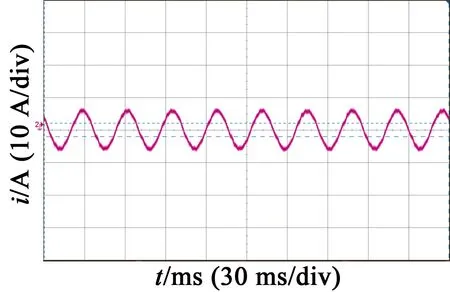
(b) n=600 r/min
(c) n=900 r/min
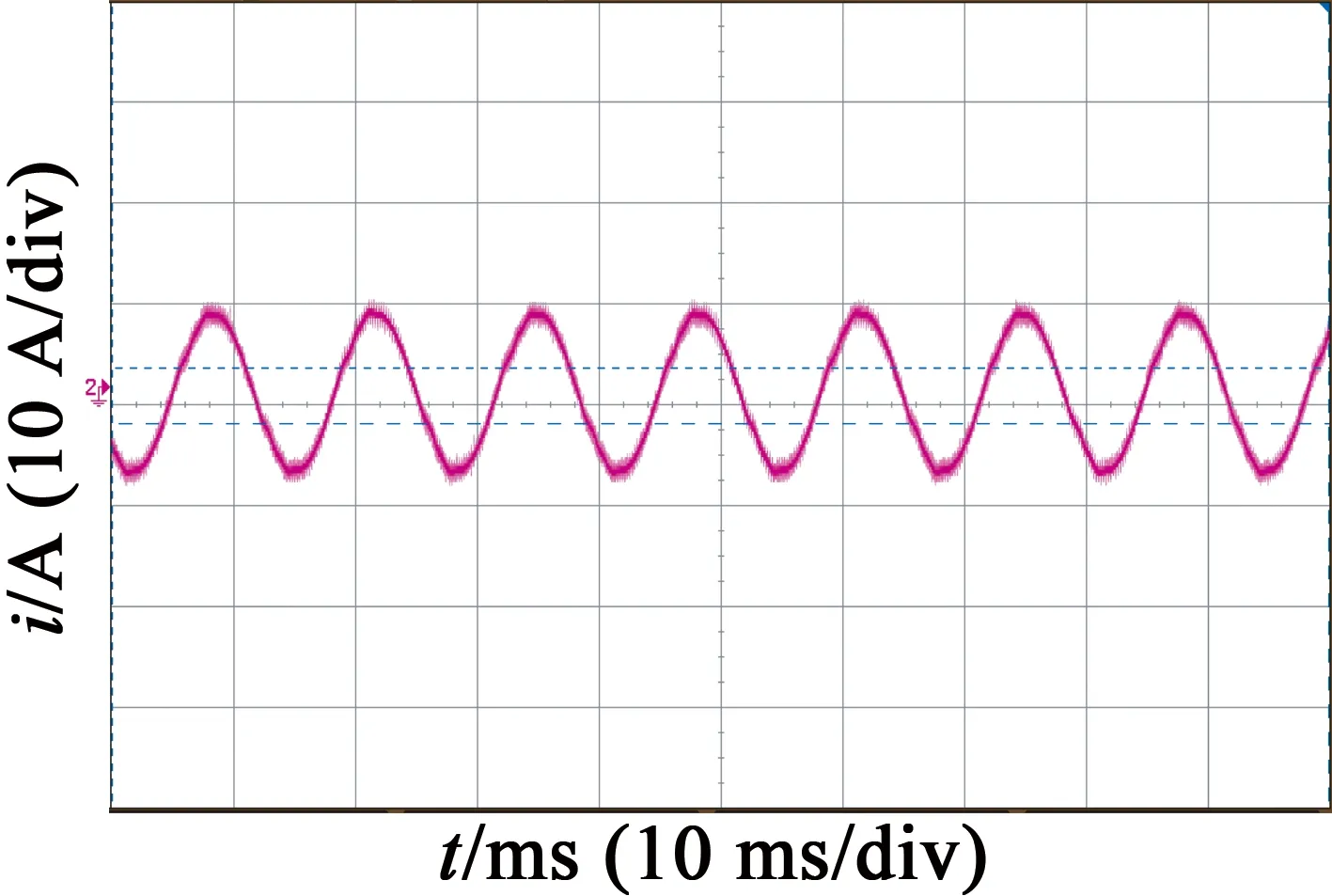
(d) n=1 500 r/min
表2分别为900r/min,1200r/min,1500r/min,1 800 r/min在额定转矩下对应的实验测试数据和用软件仿真的数据。由表2中数据可知,采用本文策略得到的电机效率明显优于仿真时的效率。
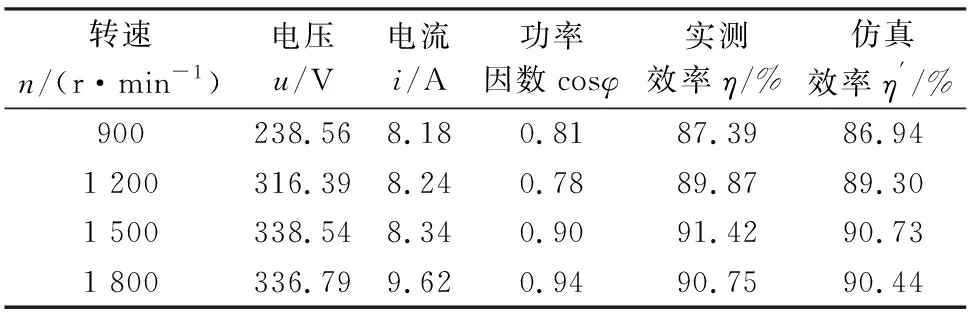
表2 额定转矩为25.46 N·m下的测试数据
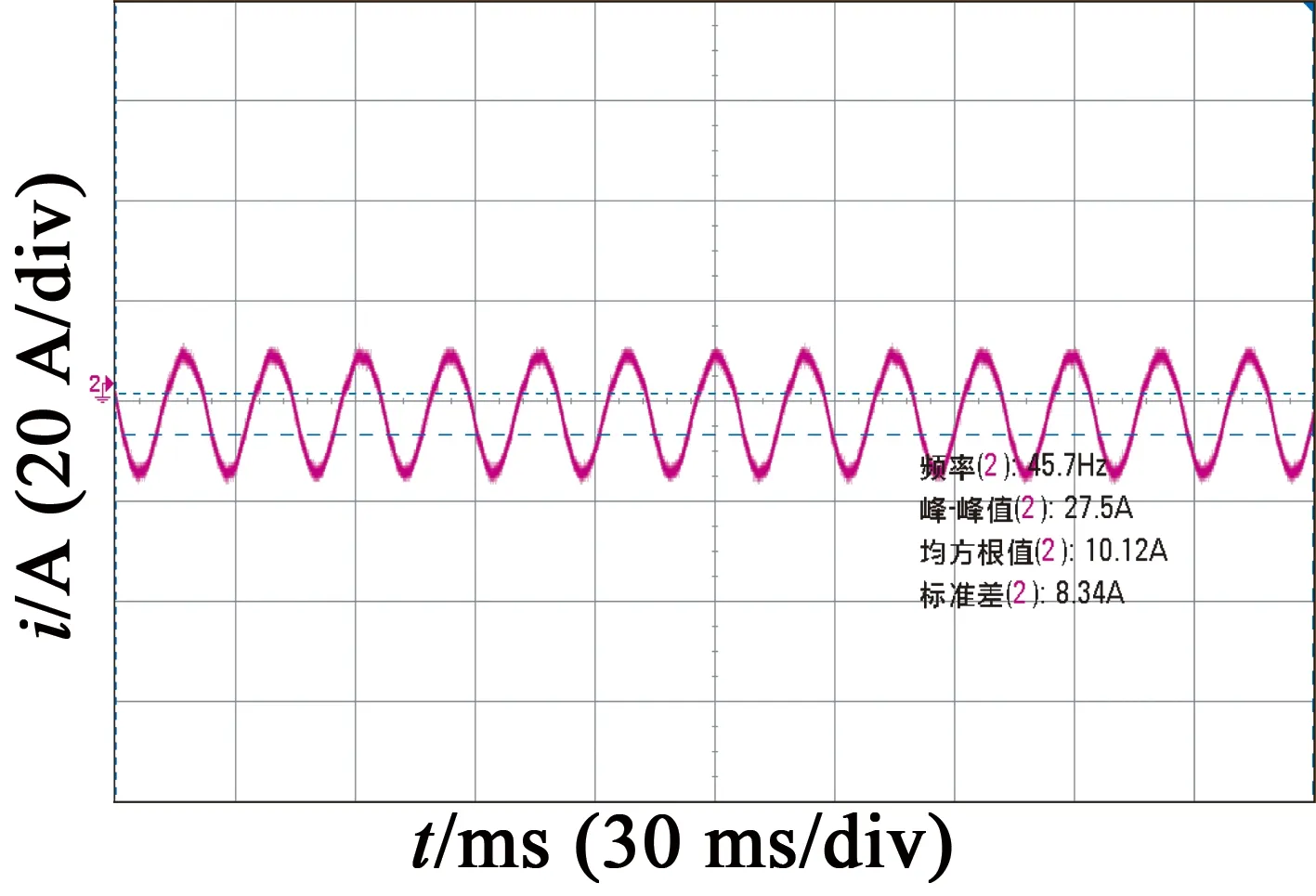
为验证同步磁阻电机的带载能力,在电机运行1 500 r/min时突加额定负载25.46 N·m后,立刻卸载,电机无异常波动,仍能稳定运行,如图7所示。由图7可看出,采用本文所提出的策略,电机具备良好的抗负载干扰能力。
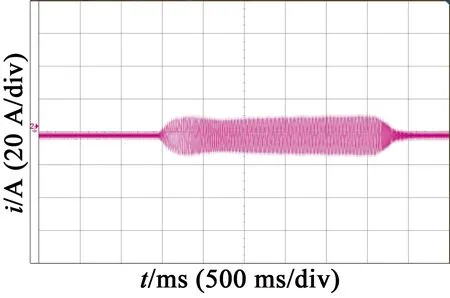
图7 突加突卸电流波形
5 结 语
本文得到同步磁阻电机在d,q轴坐标系下的数学模型,并根据其数学模型和自适应观测器原理,设计了一种同步磁阻电机的自适应磁链观测器,用于观测电机角速度和位置信息。建立电机矢量控制模型,为验证本文磁链观测器的性能,改变电机速度、改变电机负载和改变电机电感的。仿真结果和实验结果表明,该磁链观测器能够准确观测电机位置,并具有较强的鲁棒性。
