智能巡检四足机器人打造智慧燃机电厂的方法研究
2021-01-22冯庭有,蔡承伟,刘希念,肖晨宇,田际
冯庭有,蔡承伟,刘希念,肖晨宇,田际

[摘 要]文章围绕智能巡检四组机器人的特性进行了分析。以此为基础,就智能巡检四足机器人应用于燃机电厂智能巡检四组机器人应用于现代智慧燃机电厂的功能要求和性能要求、智能机器人360°视频环视监控系统的构建要求、Sim2Real智能燃机电厂巡检仿真验证平台的建立加以阐述,以供参考。
[关键词]智能巡检四足机器人;智慧燃机电厂;关节自由度
[中图分类号]TP242 [文献标志码]A [文章编号]2095–6487(2021)12–00–02
Research on the Method of Intelligent Inspection Four-Legged
Robot to Build A Smart Gas Turbine Power Plant
Feng Ting-you,Cai Cheng-wei,Liu Xi-nian,Xiao Chen-yu,Tian Ji
[Abstract]This article analyzes the characteristics of four groups of intelligent inspection robots. On this basis, the application of intelligent inspection quadruped robots to gas turbine power plants, the functional requirements and performance requirements of the four groups of robots used in modern intelligent gas turbine power plants, the construction requirements of the intelligent robot 360° video surround view monitoring system, Sim2Real The establishment of the patrol inspection simulation verification platform for intelligent gas turbine power plants is explained for reference.
[Keywords]intelligent inspection quadruped robot; intelligent gas turbine power plant; joint freedom
燃機电厂是指对环境危害小、整体发电循环作业效率高,在同能条件下投资较少的新型火力发电厂。尽管环保性能更强、发电效率更高,但燃机电厂的机组设备在规模方面,与常规火力发电厂相比并无明显区别。故,在日常巡检机组设备是否发生故障时,即使已经做好了诸多安全准备工作,但只要有人工作业,安全事故发生率在理论上便不可能降为零。基于此,基于智能巡检四足机器人打造智慧燃机电厂具备可行性,值得探讨。
1 智能巡检四足机器人特性分析
(1)智能巡检四足机器人的主要特性为:①具有能够灵活伸缩,能够自由旋转的(一般设有五个“自由度”)机械臂。②搭载视频传感器、红外测温仪、气体检测传感器的设备,能够将巡检区域的实时景象、温度、气味相关参数实时收集,经过清洗、分析、重组、整理后,形成三维环境模型以及地形概率地图,进而使机器人具备导航规划、自主避障等功能。③运维人员只需身处控制中心,向机器人发送各项指令,即可使机器人按照预定的线路对目标区域进行全面、自动巡检,也可以根据现场出现的突然发情况,临时改变巡检路线。
(2)智能巡检四足机器人装载强壮的“躯干”,四肢十分矫健(通过设置在肩膀、关节等处的齿轮、轴承等,经由内部智能系统的程序控制算法,可使该智能巡检四足机器人的“四肢”如同真正的生物一样,实现大幅度、大范围旋转、移动。但相较于真正生物四肢活动的局限性,如在特定的角度下,肢体无法继续移动,该机器人的灵活程度更高,完全没有死角,故无须担心四肢伸展方向受限问题)、嗅觉敏锐(在机器人“头部”设有多种传感器,可对多种气味进行精确辨别)、头脑聪明(配备智能处理器,可根据目标巡检区域可能发生的各类事件,将相关信息存储在内置的存储器中)。不仅如此,智能机器人还配备向外发射探测波的设备,可对扫描区域前后左右一段范围内进行实时探测,当发现区域内出现的某种情况与存储器中预设的某种情况相符合时,便会启动预定方案,采用最佳方案处理当前情况,可尽量避免机器人本身受到伤损)。该智能巡检四足机器人对隧道内的高压电缆、通道等情况能够进行综合判断,并实现人机远程交互、数据挖掘分析等全智能化运检管控功能。
2 基于智能巡检四足机器人打造现代智慧燃机电厂的要点梳理
2.1 智能巡检四组机器人应用于现代智慧燃机电厂的功能要求和性能要求
(1)四足机器人的功能要求:①具有较强的地形适应能力,较强的越障、爬坡能力。不仅能够在平坦的地面上行走,还要求能爬越斜坡,上下楼梯。②机器人结构紧凑,重量轻。尽量减小机器人整体尺寸,满足轻量化设计,提高巡检机器人的机动性能。③负载能力强,车体能够搭载多种传感器。巡检机器人需要搭载热像仪、摄像头、激光雷达等多种传感器设备,以实现现场环境信息的采集。④具有较高的可靠性,巡检机器人必须具有防水、防尘能力。⑤可实现巡检机器人远程遥控,并在无人环境下可以实现自主导航和自主避障功能。
(2)四足机器人的具体性能要求:①爬45°楼梯,35 cm台阶,30°斜坡,30 cm间隔,高度60 cm空间行走;②自带6个深度摄像头,可以实现周围环境感知;③IP67防护等级,可以防尘防水;④最大负载能力不小于15 kg;⑤水平地面上的最大速度1.6 m/s;⑥行走、跳跃、奔跑等高性能步态;⑦续航时间不少于2 h;⑧电量从低于5 %到100 %满电的充电时长不超过2 h。
2.2 智能机器人360°视频环视监控系统的构建要求
(1)由于燃机电厂内部存在多个车间且总面积较大,由此据定了一个智能巡检四足机器人应用的前置条件——机器人必须在精准定位导航系统的指导下活动,一旦移动轨迹偏离了正常范围,不仅无法完成巡检任务,还会造成损失。此外,机器人本体沿着指定路线行进时,还需要考虑到机器人驱动电机间性能的差异性以及在行进过程出现的总偏差。
在执行巡检任务时,机器人还要能够在监测点以及特殊位置处实现定位,从而能够比较准确地在监测点停止并对设备进行检测。燃机电厂需要进行24 h全场景监控,故使用四足机器人进行巡检作业时,务必保证机器人具备360°视频环视监控功能。
机器人实时拍摄的照片、视频可以达到“高清”标准,且能够对车间各个位置进行实时监测,甚至完成对各个仪表数值的精准读取,并做到场景全覆盖,无监控死角,能够随时播放现场情况。具体而言:①机器人应该实时传输视频图像,实时监控车间环境,并支持视频的播放、停止、重启、抓图、开始录像、停止录像、全屏显示等功能。②机器人需要对整个车间如头顶的管道、地面设备、四周管道等进行多方位监控,做到场景全覆盖,无死角。进行检测,并将视频实时上传至远程智能巡检管理平台。③燃机电厂中大型设备较多,且具有一定的危险性,即使智能巡检四足机器人性能良好,也总有无法到达的位置,因此,技术人员需要对厂区内进行全面巡查,在机器人无法到达之处设置固定摄像頭,用于补充检查。
(2)为了使360°视频环视监控功能得到更加良好的运用,需应用2D无轨定位导航系统。如图1所示,为2D无轨定位导航显示模式下的燃机电厂平面图。巡检路线涵盖:起点——机组汽机本体区域——机组燃机罩壳区域——机组高压给水泵变频器室——机组闭冷水泵变频器室——机组燃机润滑油区域——机组燃机密封油、氢气区域——机组燃机励磁小间——机组汽机励磁小间——机组汽机润滑油区域——机组汽机EH油区域——机组凝汽器抽真空区域——机组高、中压给水泵区域——机组柴油机房——机组高、中、低压汽包区域——机组循环水泵房区域——循泵房配电间——循环水泵变频器室——终点。
2.3 Sim2Real智能燃机电厂巡检仿真验证平台的建立
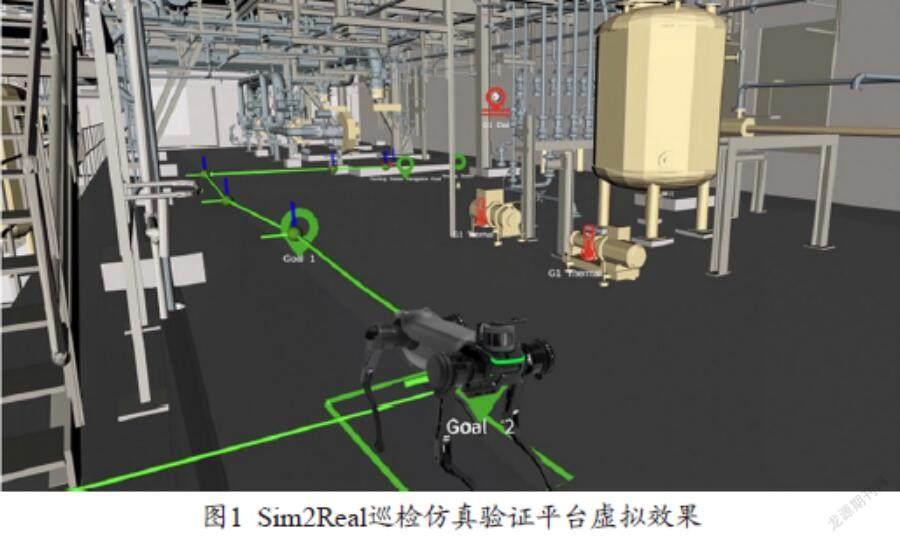
将燃机电厂整个厂区建设成一个虚拟模型,且以智能巡检四足机器人的视角作为“中心移动点”,在控制中心的计算机显示屏中会实时显示经过虚拟化处理后的现场镜像以及现场实物景象。虚拟景象,如图2所示。对Sim2Real仿真验证平台的具体要求为:
(1)虚拟的环境中除了智能巡检四足机器人外,还应注意对燃机电厂内部其他设备进行“虚拟化作业”,且机器人的行进路径同样应该明确标出,如图2所示。
(2)在全天候的虚拟环境中,四足机器人的导航、定位、路径规划等可通过虚拟图进行远程控制。如图2中的两个“圆圈”实际上是技术人员在控制端虚拟场景中,用鼠标点击的位置。均表明机器人应该前往对应的区域进行再次检查(颜色有区别表明具体地点存在功能行的差异,一种颜色是行进路线,表明该处没有其他物体;另一种颜色指代该处有障碍物,机器人无法行进至此)。不仅如此,虚拟场景中还有一个特性,即不同物质之间的区分十分明显,如图2中位于右侧的罐状设备的下方有红色标注的物体,这些与设备颜色不同的物体可能是管道开关,也可能是仪表。进行如此设计的目的在于:基于不同的颜色,燃机电厂中各个设备的重点区域、关键位置均被清晰标出,有助于控制智能机器人迅速前往查看。不仅如此,技术人员在操纵和监控的过程中,可同时对虚拟场景和现实场景进行对比查看,可进一步提高巡检效率及质量,避免遗漏。
(3)需对巡检路线和巡检点位进行模拟验证,点位的结果会直接传输到智能机器人的硬件系统中。
(4)Sim2Real仿真验证平台支持域随机化;支持CAD、URDF等多种文件格式导入;支持光线和路径追踪渲染器,具有高层次物流逼真度和功能逼真度;可扩展性强,能够包含智能巡检四足机器人在内的多种类型机器人,且传感器和驱动模块均可灵活导入,并提供模块话的标准接口来支持第三方软件开发,如图1所示。
3 结束语
智能巡检四足机器人应用于现代智慧燃机电厂时,主要工作在于,替代人接近一些危险或特殊区域,从而实时完成数据信息的收集于传迪。而在此过程中,机器人本身的“行走”是否处于稳定状态至关重要。因此,必须同时对燃机电厂的基础信息进行全面了解,对机器人的行走自由度等参数是否处于正常状态进行判定,从而实现操控智能巡检四足机器人检查燃机电厂运行情况的目的。
参考文献
[1] 黄振彬,王晓磊,孙红岩.基于免疫遗传算法在四足机器人行走中选择最佳质心位置[J].现代制造技术与装备,2021,57(8):71-74.
[2] 许威,闫曈,许鹏,等.特种机器人行业的新锐——四足仿生机器人[J].机器人产业,2021(4):50-57.
[3] 唐锴,吴焕龙,张良安,等.基于改进粒子群算法的四足机器人机体尺寸及质心位置优化[J].机械传动,2021,45(7):67-73.
[4] 王相吉.面向高速奔跑四足机器人的步态及腿部控制方法研究[D].河北:燕山大学,2021.