考虑驾驶心理的机非冲突行为研究
2021-01-21杨晓芳方向明
杨晓芳,方向明
(上海理工大学管理学院,上海200093)
交叉口是城市道路路网的节点和交通运行的拥堵点,不同的出行方式汇集于此。 机动车与非机动车之间的冲突对交叉口的运行效率产生严重的影响。其中右转机动车与直行非机动车的冲突是最主要的机非冲突之一。 而机非冲突行为是指机动车和非机动车在同一时间于交叉口处相互接近,双方为避免发生碰撞而采取的改变行车方向、减速等行为。
在交通特性方面,杜氏欣[1]提出电动自行车交通流的密度受电动自行车的流量及通行宽度的影响,并对电动自行车在交叉口的膨胀行为进行分析。 Tang 等[2]针对信号交叉口自行车的并排骑行和跟随两种群体行为,分别建立元胞自动机模型,来探讨群体行为对每辆自行车运动的影响。 武亚鹏等[3]通过分析机非穿越行为,提出了一种延误计算方法。唐克双等[4]通过对危险驾驶行为的分类来研究关键参数指标与危险驾驶行为的内在联系。 李行等[5]通过建立logit 模型,对非机动车在信号灯转换期间的穿越行为进行分析。 蒋春艳[6]利用Tracker 软件对调查视频中的车辆运行轨迹数据进行提取,验证分析了提取数据的有效性。 曲昭伟等[7]通过对比有无非机动车干扰的条件下右转机动车的轨迹分布,建立轨迹模型。 以上研究更倾向于机非个体间的行为特征,而对交叉口内右转机动车与非机动车的行为特征分析相对较少。
在冲突行为方面,Van 等[8]利用交通冲突技术,研究非机动车与其他道路使用者的冲突行为,研究发现合理地控制非机动车道宽度可以降低冲突的严重程度。 曹瑾鑫等[9]运用回归分析建立了机非冲突的预测函数,并与实际冲突次数进行对比分析。 王耀东等[10]针对驾驶员的选择通过行为提出了临界冲突时间差的概念,来判别机非冲突的严重程度。 Almodfer 等[11]探讨了在不同的车道行车冲突严重程度下,等待时间对车道行车冲突的影响。 刘洋等[12]通过视频数据,对机非冲突的避让行为进行了分类,利用TTC 指标来判定机非冲突的严重性。 张翠平等[13]通过建立非合作动态博弈的决策模型来分析机非冲突的决策行为。 前人的研究主要从冲突严重程度或冲突判别等方面入手,考虑驾驶心理给冲突行为造成影响的研究较少。
因此,本文对右转机动车与非机动车的行为进行着重的分析,并建立非机动车膨胀度模型。运用视频技术,从驾驶心理的角度对视频中机非驾驶员的冲突行为进行分类,并分析直行非机动车对右转机动车行为造成的影响。
1 机非行为特征
1.1 机动车穿越行为特征
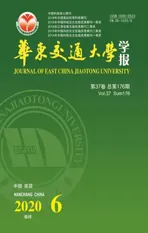
在信号交叉口处,右转机动车容易与同向直行的非机动车发生相互穿越的行为。 将机动车在信号交叉口绿灯时段的穿越行为分成绿灯启亮初期和中后期两个阶段来进行描述。 如图1 所示,阴影部分面积S 为机非冲突区。
阶段一:绿灯启亮初期,右转机动车启动到达冲突区S 前,机动车驾驶员首先需进行交通信息感知(非机动车的速度、密度等),然后再进行决策。 如不穿越,机动车驾驶员先在冲突区S 前减速停车等待,再进行信息感知,判断是否穿越;反之,则穿越通过。
阶段二:绿灯启亮中后期阶段,右转机动车启动到达冲突区S 前,右转机动车驾驶员需感知直行非机动车。 如感知到直行非机动车,则需进行决策是否穿越,此过程与绿灯启亮初期的机动车穿越行为相同;如未感知到非机动车,则机非无交互,机动车将右转加速通过。
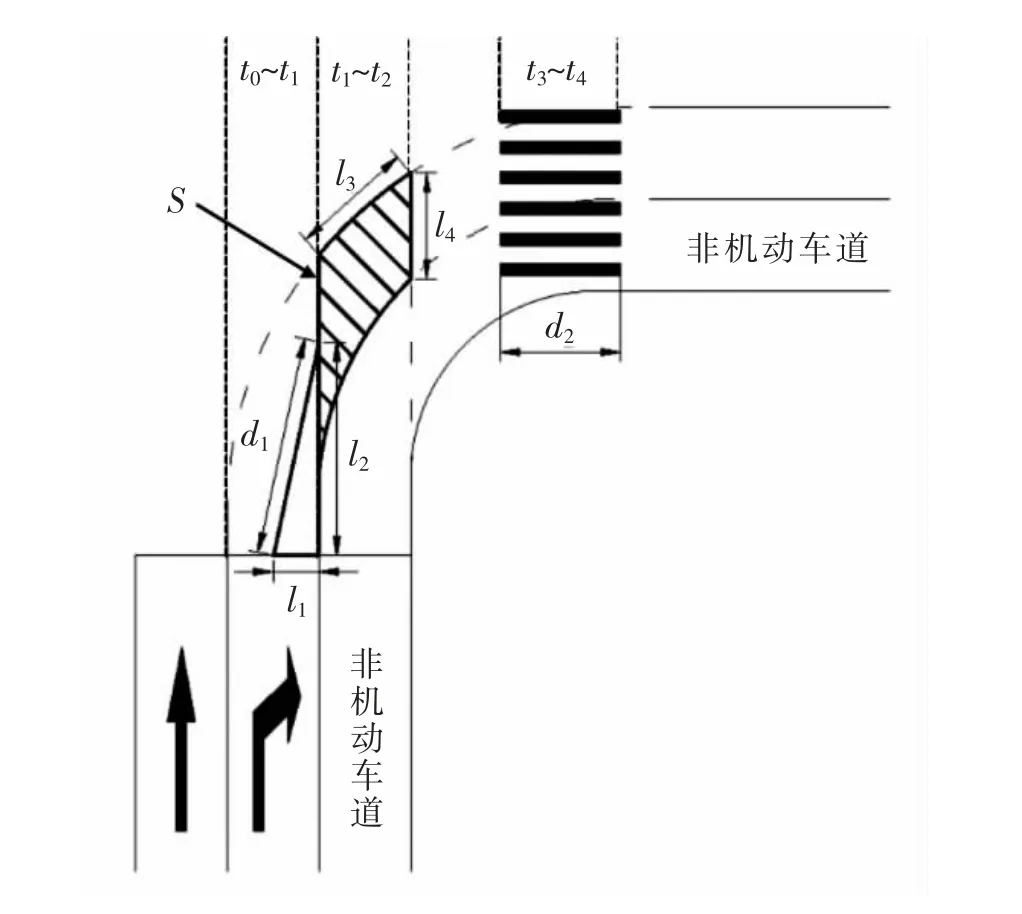
图1 机非冲突区Fig.1 Vehicle-bicycle conflict zone
1.2 非机动车释放特征
为分析非机动车的释放特征,通过调查归纳,将非机动车在信号交叉口绿灯时段的释放过程分成以下3 个阶段来进行描述。
阶段一:红灯结束前2 s 左右,同向直行相位绿灯启亮前,前排非机动车(特别是电动自行车)有启动的趋势。 待绿灯启亮后,非机动车成群从进口道驶出,释放过程中非机动车会有向两侧膨胀的行为。
阶段二:在成群非机动车释放完毕后,非机动车将随机从进口道驶出,该阶段非机动车到达通过交叉口呈离散分布,此时非机动车与机动车在交叉口容易产生相互穿越的现象。
阶段三:绿灯结束前几秒,在路段内的非机动车骑行者会产生以下两种行为。 第1 种,部分非机动车骑行者会在路段加速行驶并快速通过交叉口,以避免进入红灯期从而节约行程时间;第2 种,非机动骑行者离交叉口距离较远,经判断不能在剩余绿灯时间内通过交叉口而减速抵达停车线。
2 膨胀度模型
在红灯时段内,路段上的非机动车减速进入前方信号交叉口,停车等待绿灯启亮。非机动车在信号交叉口排队等候的过程中形成高密度的群体,待绿灯启亮时加速从进口道驶出,此时非机动车占用道路的横向宽度增大,形成膨胀的现象。 对于非机动车的膨胀现象,本文以膨胀度来描述,即非机动车在绿灯相位开启初期某一时刻的占用道路平均横向宽度与红灯排队等候时的平均横向宽度的比值。
非机动车在信号交叉口的膨胀度如式(1)所示

式中:D(t)为膨胀度;Wnmv(t)为非机动车在绿灯相位开启初期某一时刻的占用道路横向宽度,m;Wi为非机动车在红灯排队等候时的占用道路横向宽度,m(i=0 时,W0表示为在隔离设施下的占用道路横向宽度,即非机动车道宽度;i=1 时,W1表示为无隔离设施下的占用道路横向宽度);n 为停车线前头排排队等候的非机动车数量;N 为绿灯初期平行于停车线的处于同一直线上非机动车数量。
如图2 所示,非机动车在交叉口处膨胀的过程中,非机动车骑行者会有前后穿插前进的行为,导致绿灯初期平行于停车线的处于同一直线上的非机动车不如机动车般有序排列地向前行驶。机非隔离设施的设置会对非机动车骑行者的行为产生一定的影响。如图2(a)所示,由于机非隔离设施的设置,非机动车骑行者在内停车等待;如图2(b)所示,由于未设置机非隔离设施,在绿灯相位未开启前,非机动车在停车等待过程中容易发生溢出现象(即个别非机动车占用机动车道),导致非机动车在红灯排队等候时的占用道路横向宽度的增加,此时用W1表示。

图2 非机动车膨胀过程示意图Fig.2 Diagram of non-motor vehicle expansion process
如表1 所示,以上海市营口路—靖宇东路和控江路—隆昌路十字交叉口北进口道为研究对象,分别提取膨胀度。
如图3 所示,绿灯相位开始时,两种类型信号灯下的非机动车膨胀度随时间总体上有先增大后减小的变化。 倒计时信号灯下的非机动车会在红灯结束前2 s 左右开始启动,待信号灯切换成绿灯时,膨胀度开始缓慢递增, 随着非机动车车速逐渐加快,膨胀度会有明显增大的过程直至峰值,之后会开始降低。 闪烁信号灯下的非机动车待信号灯切换成绿灯时会有一段反应时间 (样本中约2 s),此时的膨胀度保持不变,随后膨胀度的变化同倒计时信号灯下的情况。

图3 不同信号灯类型的膨胀度Fig.3 Degree of expansion of different signal light types

表1 交叉口基本信息汇总Tab.1 Summary of the observed intersections
3 机非心理分析
3.1 机动车驾驶员心理
根据驾驶员驾驶风格的不同,可分为激进型、稳健型和谨慎型[14]。 在信号交叉口处,右转车辆的行为会因为驾驶风格的不同而产生不同的变化,以下分析不同驾驶风格驾驶员的心理特征。
激进型驾驶员具有求快超越的心理。 在右转的过程中,此类驾驶员往往会率先占领冲突区为快速通过交叉口做准备,此时非机动骑行者会产生惧怕心理,不得不减速等待以寻找下一个可穿越间隙。驾驶员为了较快地通过交叉口通常会提前转弯,优先选择出口道中靠近非机动车道的车道(如图4 中车道1),但也有特殊的情况,当前方存在若干辆正在排队转弯的车辆时,在停车线前的驾驶员由于超越心理会放弃跟随前车,并以较大的转弯半径行驶,选择出口道中离非机动车道较远的车道(如图4 中车道2)。
稳健型驾驶员对复杂的驾驶环境观察周到,不会采取如激进型驾驶员冒险的行为。 在右转通过冲突区的过程中, 此类驾驶员往往稳中求进,时刻注意周围的非机动车,缓慢匀速地通过冲突区,此时的非机动车骑行者将从右转车辆的两侧进行绕行通过。 等到驾驶员离开冲突区后,保证周围安全的情况下再逐渐加速驶离。 在驶出进口道前,若前方有转弯车辆时,会有跟随前车的行为而不会轻易超车。
谨慎性驾驶员对于复杂环境 (如交叉口)的应变能力不如前两种驾驶员。 在绿灯相位开启后,由于非机动车的影响,此类驾驶员往往不会迅速占领冲突区, 而在冲突区前有个等待的过程,此时待进入冲突区的非机动车骑行者会伺机占领冲突区并快速通过。驾驶员在确定冲突区里没有非机动车的时候,起步缓慢驶向冲突区。处于冲突区里的驾驶员会产生短暂的停滞时间,随后才缓缓加速驶出冲突区。
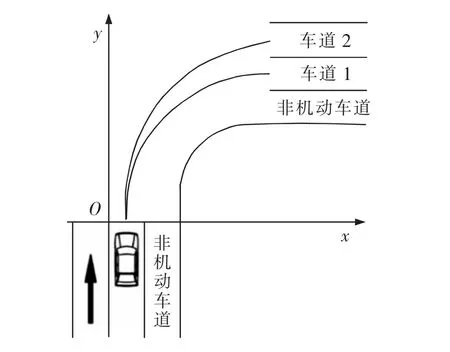
图4 右转车辆运行轨迹示意图Fig.4 Diagram of right-turn vehicle running track
3.2 非机动车骑行者心理
非机动车骑行者主要具有超越心理、惧怕心理、从众心理等。
1) 超越心理。非机动车在信号交叉口处行为敏捷,容易产生冒险行为。由于红灯时间的等待,骑行者容易焦躁,等到绿灯放行时,骑行者会以超过路段内的速度快速通过交叉口。 在交叉口中,为获得更大的行驶空间,骑行者因超越心理,超过前方的骑行者,以达到领先位置。
2) 惧怕、从众心理。 当机动车车头刚进入冲突区时,骑行者因惧怕心理在穿越冲突区的过程中与机动车保持一定的安全距离。骑行者为求稳而放弃超越前方的骑行者,而选择更为安全的跟随方式;当机动车车身处于冲突区时,骑行者因惧怕心理会采取在冲突区前减速停车的行为,待到前方存在穿越间隙,再重新调整起动;当机动车车头驶出冲突区时,骑行者的行为与机动车车头刚进入冲突区时相似。 在通过冲突区后,骑行者通常不放松警惕,易产生边骑行边转头的行为,以确保周围行驶环境的安全。
4 直行非机动车对机动车的影响分析
4.1 速度影响分析
受非机动车的影响,右转机动车通过信号交叉口的速度会产生相应的变化。 本文划分t0~t1、t1~t2和t3~t4共3 个时段来研究右转机动车通过冲突区前后的速度(如图1 所示),速度计算公式见式(2)~式(3)。
以上海市控江路-隆昌路北进口为研究对象,于早高峰7:30-8:30 时段进行拍摄调查。 通过Adobe Premiere 软件的处理,可获取t0~t1、t1~t2和t3~t4时段的精确值,由式(2)计算各时段右转机动车通过交叉口的速度。采用K-均值聚类分析将135 个样本按照右转机动车在冲突区的速度划分为三类,最终聚类结果见表2。其中有效数据135 组,缺失0。

式中:vk为各时段内右转机动车通过交叉口的速度,m/s(k=1 时,表示机动车从进口道到冲突区的速度;k=2时,表示机动车在冲突区的速度;k=3 时,表示机动车离开冲突区后的速度);d1为机动车从进口道到冲突区的距离,m;l1为1/2 机动车道宽度,m;l2为进入冲突区前机动车车头至停车线的垂直距离,m;t0为机动车驶出进口道的时刻,s;t1为机动车到达冲突区的时刻,s;l3为冲突区域长度,m;lv为车身长度,m;t2为机动车离开冲突区的时刻,s;d2为人行横道宽度,m;t3为机动车车尾进入人行横道的时刻,s;t4为机动车车尾离开人行横道的时刻,s。

根据聚类分析结果,计算出相邻聚类中心的中值作为划分驾驶员类型的临界值,分类结果见表3。在t1~t2时段,右转机动车处于冲突区之中。不同类型的驾驶员在冲突区内的速度差异较为明显。其中,激进型驾驶员的整体速度最高,最小值为10.5 km/h,最大值为18.1 km/h,平均速度为12.4 km/h;稳健型驾驶员的整体速度次之,最小值为6.1 km/h,最大值为10.3 km/h,平均速度为8.2 km/h;谨慎型驾驶员的整体速度最低,最小值为1.2 km/h,最大值为6 km/h,平均速度为3.8 km/h。

表2 聚类统计Tab.2 Cluster statistics

表3 驾驶员类型划分Tab.3 Driver classification
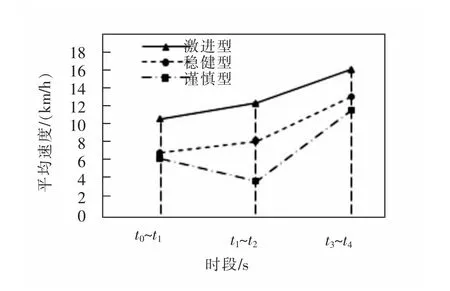
图5 交叉口各时段内驾驶员的平均速度Fig.5 Average speed of drivers in each period of intersection
由图5 所示,在3 个时段中,右转机动车的平均速度会因驾驶员的类型而产生不同的变化趋势。 激进型驾驶员和稳健型驾驶员的平均速度均有上升的趋势,说明这两类驾驶员从进口道出发至驶入出口道的时段内,总体上会有加速的行为;谨慎型驾驶员的平均速度有先下降再上升的趋势,说明该类驾驶员从进口道出发至冲突区的时段内总体上会有减速的行为,而在进入冲突区至驶入出口道的时段内会有加速的行为。 其中,在t0~t1至t1~t2时段内,激进型和稳健型驾驶员的平均速度波动较为接近,谨慎型驾驶员的平均速度波动略大于前两类驾驶员;在t1~t2至t3~t4时段内,三类驾驶员均有加速的行为,且谨慎型驾驶员的加速幅度最大,其次分别是稳健型驾驶员和激进型驾驶员。
如表4 所示,对t0~t1、t1~t2和t3~t43 个时段的不同风格驾驶员速度进行单因素方差分析。 结果显示,P 值=0.000<0.05,即受直行非机动车的影响,各时段不同驾驶风格的驾驶员速度具有显著性差异。

表4 单因素方差分析Tab.4 One-way anova
4.2 轨迹影响分析
同一进口道右转机动车的运行轨迹会因驾驶员对出口道选择的不同而发生变化(如图4 所示),而对不同风格的驾驶员而言并不能进行很好的区分。 受直行非机动车的影响,不同风格的驾驶员通过交叉口的时间会有所不同,将右转机动车运行轨迹中的横向距离(机动车右转过程中所处位置至进口道的垂直距离)与时间进行曲线的绘制,以分析不同风格的驾驶员在交叉口中与直行非机动车的冲突行为。
如图6 所示, 为上海市控江路-隆昌路交叉口北进口提取的3 条不同风格驾驶员通过交叉口横向距离曲线图。 曲线轨迹表明,随着时间的推移,右转机动车的横向距离逐渐增加, 其增长幅度总体上呈由小变大的趋势。其中,激进型驾驶员的横向距离随时间变化得最快,其通过交叉口的时间最短,延误水平最低。 稳健型驾驶员的横向距离增长幅度较为平稳, 其通过交叉口的时间较激进型驾驶员略长。谨慎型驾驶员的轨迹变化较大,由于该类驾驶员受直行非机动车的影响会有停车等待的行为,此时其横向距离将不再增加,轨迹趋于水平直线, 通过交叉口的时间较其他风格的驾驶员也就越长。

图6 驾驶员时间-横向距离变化曲线Fig.6 The relationship between time and lateral distance of drivers
5 结论
本文以信号交叉口右转机动车和直行非机动车为研究对象,分析其在信号交叉口的行为及驾驶心理。研究结果表明:①非机动车膨胀度随时间总体上有先增大后减小的变化趋势,且不同信号灯类型下的膨胀度会受非机动车反应时间的影响。 ②通过对右转机动车在冲突区的速度进行K-均值聚类,分析得0<V≤6 km/h 时为谨慎型,6<V≤10.3 km/h 时为稳健型,V>10.3 km/h 时为激进型。③激进型驾驶员和稳健型驾驶员通过交叉口的平均速度均有上升的趋势;谨慎型驾驶员的平均速度有先下降再上升的趋势,且平均速度波动幅度略大于前两类驾驶员。 右转机动车的横向距离随时间的推移逐渐增加,其增长幅度总体上呈由小变大的趋势,其中谨慎型驾驶员受直行非机动车的影响轨迹变化较大。 本文仅对机动车驾驶员风格进行了分类,然而不同风格骑行者和驾驶员之间的行为更为复杂,后续可对非机动车骑车者类型进行划分,并作进一步分析。