工业机器人运动学建模与分析
2021-01-21张小红
张小红
(平顶山技师学院,河南 平顶山 467000)
1 IRB1200机器人简介
IRB1200机器人是由ABB公司生产的六自由度关节型机器人,每个自由度对应一个转动轴,六个自由度的工业机器人已能满足绝大多数的工业生产需求。IRB1200机器人在保持机器人工作范围宽广优势的基础上,还满足了物料搬运和上下料环节对柔性、节拍、易用性和紧凑性的多种要求。该机器人可满足许多生产线的流水作业操作及工艺要求,质量为52kg,重复精度为0.02 mm,最大负载7kg。小巧的造型结构大范围扩展了其在工业生产中的应用,类似于手腕、手掌的设计,并使用6个转动关节进行连接,运行作业相当灵活,产品的参数与各关节工作空间如表1所示。
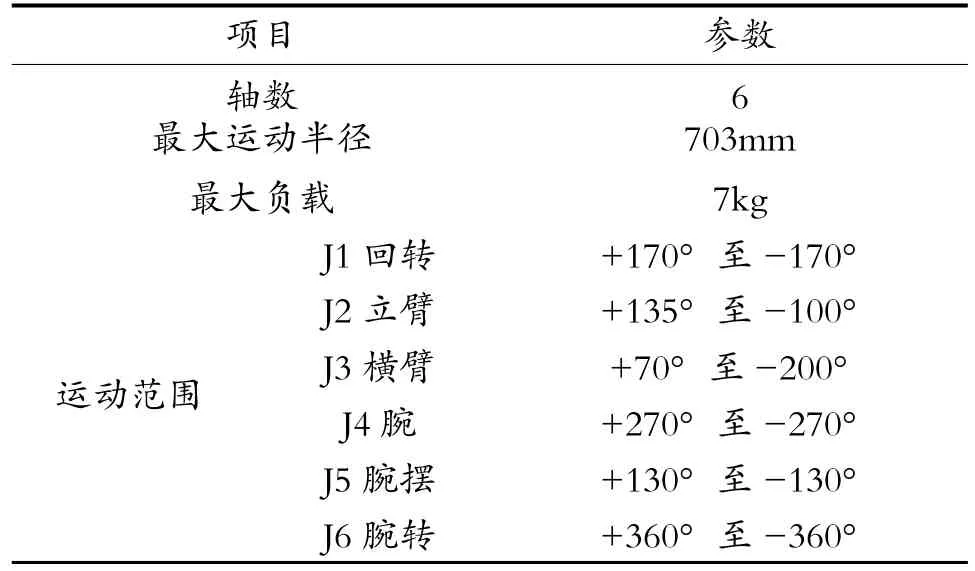
表1 IRB1200机器人关节参数和工作空间
从表1可以看出:该机器人最大运动半径达703 mm,运动范围非常广泛,腕关节最大承载重量为7 kg,可完成众多类型物品的搬运工作。机器人的关节参数和工作空间也代表机器人各关节的承载能力和转动范围,将机器人的各个关节限定在一定作用范围内,也更符合安全操作的要求,使机器人在运行中不至于发生危险事故。如果在末端执行器上安装各种抓手,就可进行流水作业,如焊接、装配、物流等操作。IRB1200机器人有两种型号,工作范围分别为703 mm和901 mm,最大有效负重分别为7 kg和5 kg。由于安装角度任定,在工业生产中,这两种型号的机器人广泛适用于各类作业。
IRB1200机器人之所以能在工厂中被广泛使用,取决于其全新的设计。各种优化特性使工作站缩小15%,使时间缩短10%。机身小巧、均能以任意角度安装、有效工作范围扩大,有利于提高生产速度,减少设备占用空间。
2 IRB1200机器人运动学建模分析
上文给出的IRB1200机器人结构设计和连杆参数是分析机器人运动学的前提。机器人的运动学分析还涉及到连杆之间的位移、速度和加速度的关系。为了研究IRB1200机器人的正运动学和逆运动学,根据机器人的尺寸和外型,运用D-H参数法并进一步结合齐次变换矩阵的理论知识,建立了机器人关节坐标系。
由于IRB1200机器人共有6个自由度,因此需要建立7个坐标系,如图1所示。假设基坐标系与关节1建立的坐标系重合,将该坐标系设置为{1}。此时z轴为z1,方向与常用三维空间的坐标系z轴方向一致,同时x轴记为x1,方向与常用三维空间坐标系中的x轴方向一致。以此类推,建立坐标系{1}、{2}…{7}。
由IRB1200机器人模型和关节坐标系可得出机器人的D-H参数表,具体步骤如下。
步骤1:若想转换从坐标系 {1}转换到坐标系{2},根据D-H参数法,需经过两次旋转、两次平移变换建立矩阵。首先,在关节2上绕坐标系{1}的z1轴旋转θ,根据机器人关节旋转方向定义,逆时针为正,再综合考虑右手法则,此时连杆夹角为θ1;然后,沿着z1方向移动d1距离,使得坐标系{1}与坐标系{2}的原点重合;最后,绕坐标系{2}的z2旋转α1使得坐标系{1}和坐标系{2}的z1方向与坐标系{2}的z2方向一致,此时,{1}和{2}的位置与姿态一致。
步骤2:若从坐标系{2}转换到坐标系{3},首先,在关节3上绕坐标系{2}的z2轴旋转θ,根据机器人关节旋转方向定义,顺时针为正,再综合考虑右手法则,此时连杆夹角为θ2;然后,沿着z2方向移动d2距离,即两连杆的距离,接着沿着公垂线移动a3距离,即连杆长度,使得坐标系{2}与坐标系{3}的原点重合;最后,绕坐标系{3}的x3旋转α2使得坐标系{2}和{3}的z2方向与坐标系{3}的z3方向一致,此时,{2}和{3}的位置与姿态一致。
以此类推,可得出其余坐标系及D-H参数表,如表2所示。
根据以上建立的IRB1200机器人D-H模型,可进行正、逆运动学求解及仿真实验。
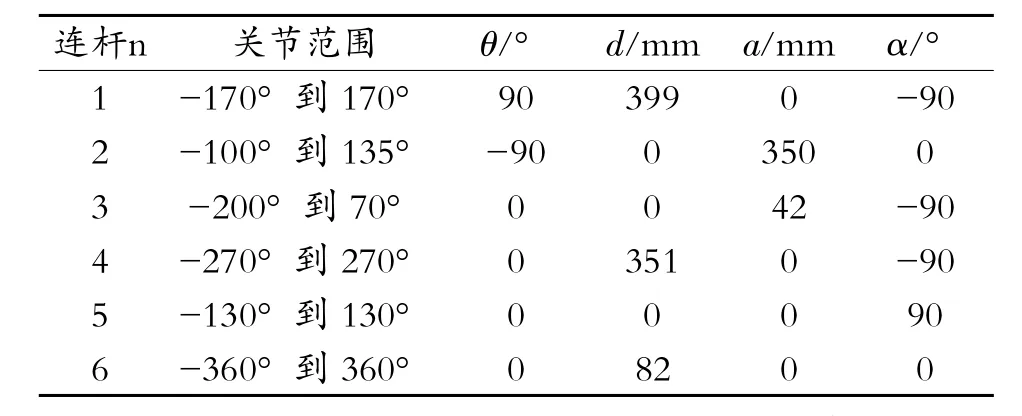
表2 D-H参数表
正运动学求解是根据机器人的结构参数或运动关节变量求解机器人末端执行器在坐标系中的位置和姿态,而逆运动学求解正好相反,是根据末端执行器的位置和姿态反向求解各关节变量。但由于逆运动学求解涉及的结构参数是从关节空间坐标到笛卡尔坐标空间转换的,因此逆运动学求解比正运动学求解更为复杂,解也不是唯一的。
一般而言,机器人的末端执行器所能到达的所有空间点的集合称为机器人的工作空间。工作空间大小也是实际操作中考虑的一项重要指标。根据每个机器人工作空间的大小,可选择串联的机器人个数以满足工作场地的要求。因此,明确机器人的工作空间并对机器人的工作空间进行仿真实验,也是研究机器人运动学的一项重要工作。
