基于FFT的概率神经网络故障诊断模型及其意义研究
2021-01-20
武汉商学院机电工程学院 湖北 武汉 430056
1 引言
航空航天领域中,技术发展与创新在很大程度上受到安全性以及可靠性水平的影响,更对飞行器飞行安全产生非常直接的作用。作为执行器中非常重要的构成部分之一,电机面向无人机提供动力来源支持,电机性能在很大程度上可以通过无人机旋翼转动效益反应出来,进而对无人机的飞行稳定性产生影响,由此可见其安全水平的重要性。作为无人机系统中的核心部件之一,传感器装置能够实时客观测量无人机飞行状态,并通过结合执行器的方式满足控制需求。在传感器、电机出现微小故障的情况下,若能够采取一定方式方法对故障进行尽早且准确的诊断,则对于提前检修时机,保障无人机运行安全是至关重要的。概率神经网络作为一种应用频率较高的深度学习框架,在预测分类以及故障诊断过程中有着相当广泛的应用,基于FFT的概率神经网络故障诊断模型对无人机故障诊断以及故障模式识别有着非常重要的意义与价值。
2 无人机Simulink模型
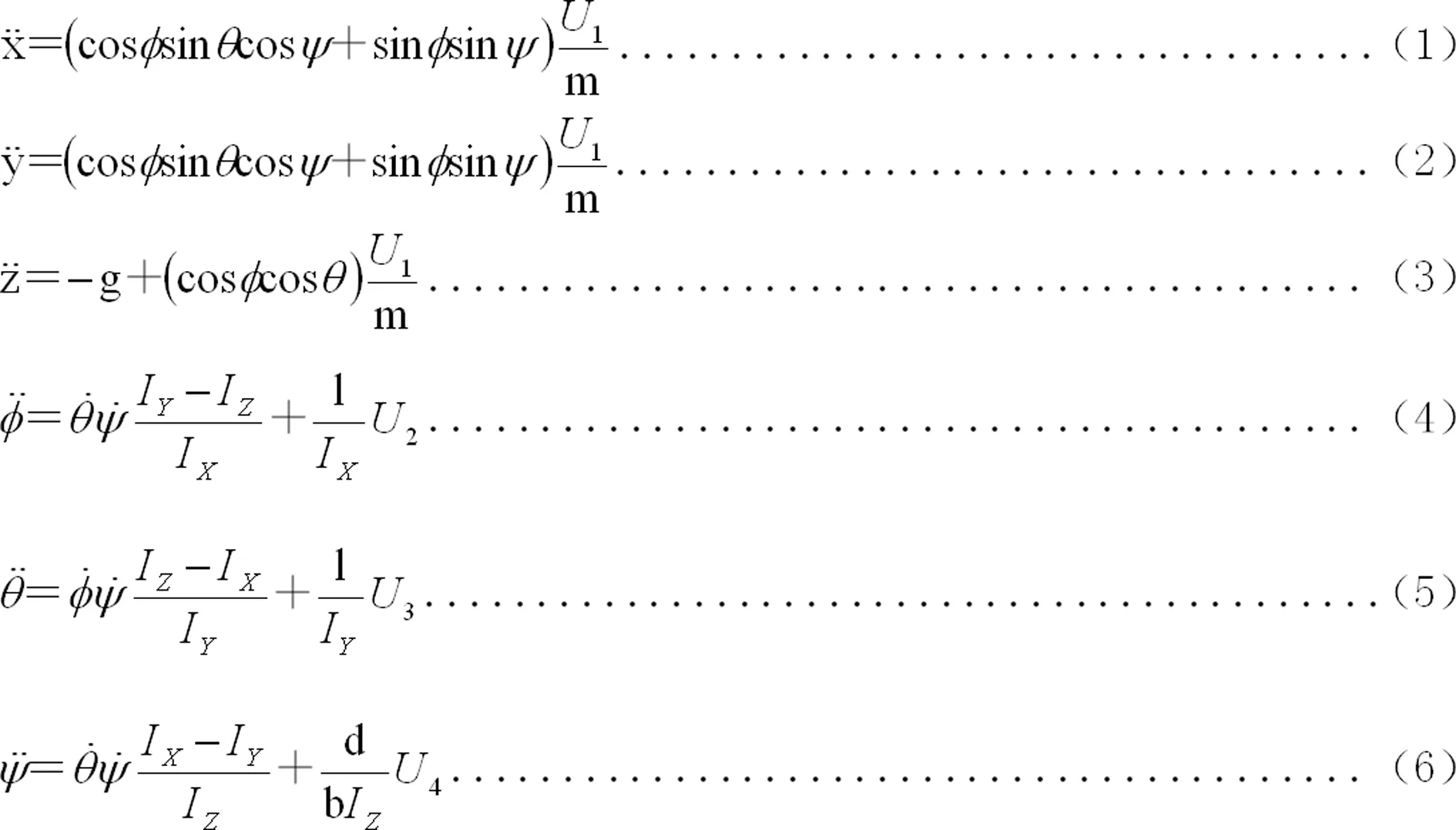
在针对六旋翼无人机构建数学模型的过程当中,为了方便模型处理,最大限度简化模型计算的复杂程度,需要作出一定的假设:假设一,六旋翼无人机为刚体,飞行期间质量保持恒定状态;假设二,六旋翼无人机飞行过程中地面坐标系统具有惯性坐标系统特点,重力加速度维持恒定状态;假设三,不对无人机飞行过程中所存在空气阻力以及陀螺效应进行考量。在上述假设基础之上,将无人机质量定义为m,将重力加速度定义为g,将臂长定义为l,将推力因子定义为b,将反扭矩系数定义为d,将滚转角定义为φ,将俯仰角定义为θ,将偏航角定义为ψ,将位置x通道上所对应转动惯量定义为Ix,将位置y通道上所对应转动惯量定位Iy,将位置z通道上所对应转动惯量定义为Iz,将垂直通道上Backstepping控制法对应控制率定义为U1,将滚转通道上Backstepping控制法对应控制率定义为U2,将俯仰通道上Backstepping控制法对应控制率定义为U3,将偏航通道上Backstepping控制法对应控制率定义为U4。则可以按照如下方式对六旋翼无人机运动以及动力学方程进行初步推导:
3 概率神经网络模型
概率神经网络作为典型分类器,在预测分类领域中得到广泛应用,尤其在故障诊断过程中扮演着非常重要的角色。以六旋翼为例,在电机失效的情况下,螺旋桨转动速度会直接受到输出效率变化因素的影响,无人机飞行姿态也会发生一定程度上的改变。并且,无人机飞行姿态所发生的偏转还会直接受到故障电机类型的影响。除此以外,在角速度传感器装置出现偏移故障的情况下,无人机姿态角速度的以及角度变化也会受到非常直接的影响。因此,在有关基于FFT概率神经网络故障诊断模型问题的研究过程当中,输出量选择滚转Roll姿态角及其对应角速度、俯仰Pitch姿态角及其对应角速度、以及偏航Yaw姿态角及其对应角速度,同时以滚转Roll姿态角、俯仰Pitch姿态角以及偏航Yaw姿态角作为电机故障特征元素,并结合姿态角速度作为传感器装置故障特征元素。
3.1 故障数据 以无人机仿真飞行期间第10s为标准,面向无人机注入相对应的单故障模式。设计如下三个工作状态:状态一,6个电机正常运行,为全效率输出,i=1~6,Pi=1.0;状态二,6个电机正常运行,单独为可忽略失效,i=1~6,Pi>0.98;状态三,6个电机微小失效,为单独自定义失效状态,i=1~6,Pi为0.9~0.98。根据上述三种状态,对无人机飞行状态进行仿真分类。定义六旋翼正常以及1#电机于仿真飞行期间第10s状态下发生10.0%失效状态,所对应原始数据如下:(1)六旋翼正常状态下原始仿真数据为:No1,正常滚转Roll姿态角为-4.9787e-25,正常俯仰Pitch姿态角为1.4185e-42,正常偏航Yaw姿态角为2.7513e-25;No2,正常滚转Roll姿态角为-1.4030e-23,正常俯仰Pitch姿态角为6.0151e-42,正常偏航Yaw姿态角为1.7557e-24;No110000,正常滚转Roll姿态角为-2.2395e-16,正常俯仰Pitch姿态角为1.1587e-16,正常偏航Yaw姿态角为-3.9533e-17;No150205,正常滚转Roll姿态角为-2.3803e-16,正常俯仰Pitch姿态角为3.5155e-17,正常偏航Yaw姿态角为6.6807e-17;No150206,正常滚转Roll姿态角为-2.3808e-16,正常俯仰Pitch姿态角为3.5154e-17,正常偏航Yaw姿态角为6.6808e-17;(2)六旋翼1#电机于仿真飞行期间第10s状态下发生10.0%失效状态下仿真数据为:No1,故障滚转Roll姿态角为-4.9787e-25,故障俯仰Pitch姿态角为1.4185e-42,故障偏航Yaw姿态角为2.7513e-25;No2,故障滚转Roll姿态角为-1.14030e-23,故障俯仰Pitch姿态角为6.0151e-42,故障偏航Yaw姿态角为1.7557e-25;No110000,故障滚转Roll姿态角为0.0457,故障俯仰Pitch姿态角为-0.0784,故障偏航Yaw姿态角为-0.0180;No150205,故障滚转Roll姿态角为0.0544,故障俯仰Pitch姿态角为-0.0937,故障偏航Yaw姿态角为-0.0197;No150206,故障滚转Roll姿态角为0.0544,故障俯仰Pitch姿态角为-0.0937,故障偏航Yaw姿态角为-0.0197。由上述数据可知:对于无人机每一次飞行试验,单个输出变量可以得到150206条仿真数据,本次研究中共设计飞行状态50种,所对应仿真数据为22530900条。在此基础之上,针对角速度传感器装置故障状态进行设计,分别考虑三个角速度传感器正常状态下的正常情况以及三个传感器装置单独偏移故障状态下的异常情况,可设计飞行状态16种,所对应仿真数据为14419776条。
3.2 FFT数据变换 作为一种基于离散傅里叶变化的高效快速算法,本次研究中FFT功能搭载MATLAB环境实现,故障诊断过程中的关键代码设置标准如下:(1)Fs=100,%,采样频率;(2)t=roll.time(11000:14000),%,采样时间;(3)y=roll.signals.values(11000:14000),%,采样值;(4)L=length(t),%,信号时长;(5)NFFT=2 nextpow2(L);Y=fft(y,NFFT)/L,%,归一化处理。
以六旋翼正常状态下原始仿真数据No1:正常滚转Roll姿态角-4.9787e-25为例,对FFT设计进行基本阐述:第一步,选取无人机稳定飞行第11s后稳定状态,提取40000条左右稳定数据进行分析;第二步,应用相同FFT方法对每1000条时域数据进行处理,自数据集中取最大值作为当前数据条目下的最终FFT值,并将其记做Roll FFT值。在电机故障状态下,按照上述操作步骤可以得到1000数据所对应的Pitch FFT值以及Yaw FFT值,通过此种方式可以形成一个标准特征向量集合,将该向量定义为[Roll FFT;Pitch FFT;Yaw FFT]。在此基础之上,按照同样方法对传感器故障进行处理,可以得到与之对应特征向量集合,将其定义为[Roll FFT;Pitch FFT;Yaw FFT,Roll V;Pitch V;Yaw V](其中Roll V;Pitch V;Yaw V分别定义为Roll姿态角;Pitch姿态角;Yaw姿态角角速度)。因此,无人机每次飞行可以形成FFT特征向量共包含40个稳定数据。
3.3 概率神经网络设计 作为典型分类器,概率神经网络的基本结构如下图(见图1)所示,其分层可以按照输入层、模式层、加法层以及类别层这四个部分划分。其中,输入层用于对网络样本的输入,模式层用于对相关样本类别概率的计算,加法层则以模式层同类别输出为标准对其进行加权平均处理,而类别层则以Bayes原理为前提,对最大后验概率类别进行选取并输出。

图1 概率神经网络基本结构示意图
本文分析中对PNN模型的构建通过基于MATLAB的库函数实现,表达方式定义为newpnn(P,T,SPREAD),参数设置包括P特征输入矩阵、T类别向量以及SPREAD延伸因子这三项。在此基础之上,通过如下方式构建概率神经网络:(1)第一步,对六旋翼无人机电机、角速度传感器装置模式类别标签进行初步定义:1#故障电机对应类别标签为1,2#故障电机对应类别标签为2,3#故障电机对应类别标签为3,4#故障电机对应类别标签为4,5#故障电机对应类别标签为5,6#故障电机对应类别标签为6,无故障电机对应类别标签为7。角速度故障传感器滚转角对应类别标签为1,俯仰角对应类别标签为2,偏航角对应类别标签为3,无故障对应类别标签为4;(2)第二步,针对电机故障,自数据样本中随机选择训练样本,构成3*700维训练集合,并生成与之对应模式类别向量,在此基础之上对其进行归一化处理。剩余数据作为网络测试样本。针对传感器故障,自数据样本中随机选择训练样本,构成3*200维训练集合,并生成与之对应模式类别向量,在此基础之上对其进行归一化处理。剩余数据作为网络测试样本;(3)第三步,基于newpnn函数构建PNN模型,设置参数并构建概率神经网络进行训练;第四步,重新载入训练PNN模型,模式识别原训练集以及更新测试集,在此基础之上对结果进行分析,以此种方式保障模型对故障模式的识别能力可靠。
4 结束语
本文在六旋翼Simulink仿真模型基础上,分别针对电机失效和角速度传感器的单故障模式,提出了一种基于FFT的概率神经网络故障诊断模型。首先在Simulink平台上对六旋翼无人机完成了数学建模。其次设计了无人机的仿真行试验以及FFT处理方法。然后在MATLAB环境下实现了概率神经网络模型的设计与建立,并通过此网络模型对电机失效和传感器偏移故障进行了模式分类,验证了其良好的故障模式识别能力与网络预测能力。由于本文建模所考虑的外界干扰不全面,同时仿真数据有限,因此未来还需进行一步设计该故障诊断模型,并提供更多的数据支持。
