基于单片机的电磁四轮循迹及避障策略
2021-01-20赵士勋
张 旭,高 琴,赵士勋
(防灾科技学院,河北 三河 065201)
0 引 言
随着科技的进步,工业生产正在向高度自动化方向靠拢。其中电磁导航技术由于其自身稳定性高,抗干扰能力强等因素成为工业运输研究的重点。
基于此,本文设计了一种电磁四轮的稳定循迹且躲避道路障碍的方案。实验中在小车上安装5路电磁传感器感知道路信息;使用运算放大电路将获得的信号进行放大便于数据处理;使用夏普公司出品的激光测距传感器作为路障标志检测传感器;使用大赛统一规定的恩智浦32位处理器进行数据处理。最后探索出使用舵机转向和后轮差速相结合的转向策略,舵机根据单片机处理道路元素得到的数据进行打角,后轮进行差速处理使小车稳定应对弯道等,得到一套可以使小车稳定绕过路障的方案。
1 道路元素分析[1]
实验道路上铺设有中心电磁引导线,导线通过的交变电流为100 mA/20 kHz。交变电流产生的磁场在经过电感转变成微弱的电信号,由运算放大器进行放大,最后数据传输到单片机进行处理,达到循迹的目的。道路有弯道、十字路、坡道、环岛、及横断路障等横断路障等元素。其中横断路障是宽高为20 cm,长度与道路等宽的立方体。车模遇到横断路障可以在距离1 m的范围内驶出道路,绕过横断路障后在距离路障1 m之内返回道路。圆环部分需要小车绕行一周后继续前行。
2 小车结构分析
2.1 整体结构
本文使用的车模采用四轮结构,后轮由2个直流电机提供动力,前轮由舵机提供转向动力,用拉杆连接小车前2个轮子达到转向的目的。电感传感器和距离传感器位于小车前部自主设计的支架上,可以适当加长支架,在使小车运行速度更快的同时使小车的运行更稳定。同时小车安装了一个陀螺仪和加速度传感器用于记录小车姿态。2个512线尼龙编码器用齿轮与电机相连,可测量小车的速度。
2.2 传感器排布
电感传感器排布[2]如图1所示,考虑到道路的复杂性,选择使用两个方向的电感排布,对道路有更好的适应性。横置电感因为其敏感性强、稳定性高,被用于弯道、十字的循迹。竖直电感对于直道有屏蔽作用但是对圆环部分的感应更敏感,因此用于圆环部分的循迹。中间的横置电感在圆环部分会感知2倍于普通道路的电感量,因此用于圆环的识别标志。距离传感器安装在小车最前方,可以具有避免误触的功能,同时使距离测算更加准确。

图1 电磁传感器排布方案
3 软 件
3.1 元素判别
由静磁学中的比奥-萨伐尔定律可知,随着距离电磁线距离的增加磁感应强度会减小。把每个电感连续取得的5个值进行排序,去掉最大值和最小值之后求和取平均值进行中值滤波,可使获得的数据更可靠。根据不同的电感值可以判别出道路的直道、弯道、十字等元素。圆环部分的判定使用位于中间的横置电感,当中间电感值增大至约为直道的2倍时可以判定是圆环;当距离传感器检测到距前方障碍物小于一定值时可以判定前方是路障。控制结构如图2所示。
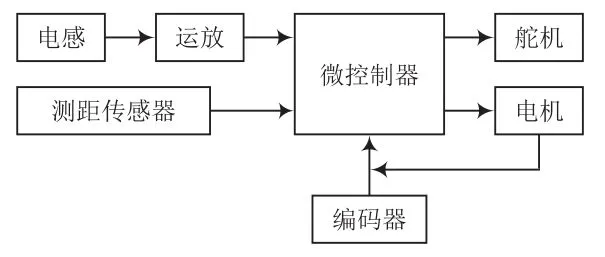
图2 控制结构
3.2 控制算法
PID因其结构简单、稳定性好、工作可靠、便于调试等原因成为智能车控制的主要技术之一,所以本文采用PID来分别控制舵机和电机,这样可以使小车快速稳定运行,并在不同的赛道元素中实现速度变化,公式如下:

(1)方向PD闭环控制。电感采集到道路信息经过单片机滤波、归一化处理之后,得到的值与小车相对于道路中线的偏差成正比,且正负值和小车偏离的方向相关。根据实际情况给舵机进行限幅处理防止舵机烧坏。控制算法中的P、D需要大量的实际调试数据来确定。选取合适的值可以使智能车的运行更稳定。
(2)速度积分分离PI闭环控制。由于智能车在不同的赛道元素上所需要的速度不同,积分I对车速的影响较大。所以我们使用了积分分离PID控制算法。控制算法的离散化公式为[3-4]:

当被控量与设定值偏差较大时,可取消积分作用;当被控量接近给定值时引入积分控制,可消除静态误差,提高精度。小车2个后轮使用2个512线编码器进行测速。这个方法可以避免因为道路元素而引起的速度超调,使小车运行更稳定。
3.3 控制策略
小车在转弯时内外两侧车轮会移动不同的曲线距离,外侧车轮移过的距离大于内侧车轮。此时如果不对后轮进行差速处理会出现车轮拖滑的现象,这对于判定小车的速度和位置有很大的影响,所以实验中选择舵机转向和后轮差速结合的方式进行转向。根据舵机的转向给小车转向时的外轮加上补偿,可以有效避免拖滑的现象,使小车对信息的判定更加准确,行驶速度更快。
3.4 特殊元素
3.4.1 圆环
圆环元素示意图如图3所示。小车在靠近圆环时中间电感值会增大,到切点处时会增加到最大值,约为直道的两倍。这时便可以确定为圆环元素。确定为圆环之后2个竖直放置的电感因为圆环的电感线而导致磁感应强度增加。这时只需要关闭横置电感,用竖直电感进行循迹即可。进入圆环之后选择合适的时机关闭竖直电感,用横置电感循迹小车就会转出圆环继续行驶。
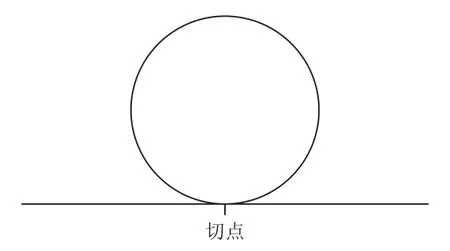
图3 圆环示意图
3.4.2 路障
路障元素示意图如图4所示。路障元素为本届大赛新增元素。规则要求车模可以在路障前1 m驶出道路,绕过路障后在路障1 m之内返回道路。因此团队探索出了一个使用陀螺仪辅助通过的方案。当距离传感器检测到路障之后,根据勾股定理可以大致计算出小车行驶到路障处的距离。使舵机向道路外打角,由陀螺仪积分得到转向角度,并且同时由编码器积分得到小车行驶的路程。当积分的角度可以通过时,舵机打角回正继续积分角度使小车直行。直行至可以通过的距离之后,给舵机一个反方向的固定角向道路内行驶。当小车的2个横置电感值增大到一定值时可以判定车模回到道路中,可以继续循迹行驶。
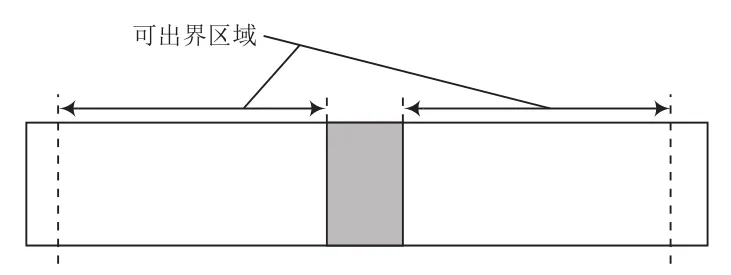
图4 路障示意图
4 结 语
目前,电磁四轮因成本低、稳定性高等优点已经广泛应用于自动分拣机器人等领域,并且还有更多方面的应用待探索。本文对电磁四轮的循迹以及避障策略做了分析,使用电感及距离传感器可以快速稳定的完成循迹功能。在控制策略方面,本文探索出的控制策略虽然已经可以满足循迹的需求,但是还有更加稳定的模糊控制需要去探索。
