多技术融合的房地一体测量方法探讨
2021-01-19徐喜旺
梁 爽,徐喜旺,李 晖
(自然资源部 第二地形测量队,陕西 西安 710054)
0 引言
农村房地一体测绘属于地籍测量范畴,目前主要采用的是全野外数字化测量方法,这种方法效率低下、劳动强度大,而且由于农村人空巢化现象严重,因锁门无法进入,导致测量人员没办法获取所需外业数据,存在很大的测绘死角[1]。农村房地一体测量工作体量大、时间紧、任务重,大部分村庄分布零散、交通不便,依靠传统的测量技术手段难以在短时间内完成此项工作任务。卢加华,刘健,田滔等人开展了基于单镜头航摄的三维倾斜摄影测量工作[2],发现其很难满足城镇规划区范围内房地一体精度要求,但在城镇规划区范围外基于单镜头航摄的三维倾斜摄影测量精度能满足规范要求。徐建国探讨了消费级无人机倾斜摄影技术在房地一体测量中的技术流程和技术优势[1]。
采用无人机倾斜摄影测量技术一种测量手段能够部分地开展房地一体测量工作,但是受限于目标地物遮挡及飞行器、相机等多种因素的影响,仅靠单一技术手段不能完成整个项目的开展。本文以陕西省境内的某镇为研究对象,开展了无人机倾斜摄影测量技术、三维激光扫描技术及传统测绘技术手段等多种技术融合的方法在房地一体测量工作中的应用探讨,为解决房地一体测量工作的效率和精度问题提供一种思路。
1 主要技术手段
1.1 无人机倾斜摄影测量技术
无人机倾斜摄影技术是国际测绘领域近些年发展起来的一项高新技术,它颠覆了以往正射影像只能从垂直角度拍摄的局限,通过在同一飞行平台上搭载多台传感器,同时从一个垂直、4个倾斜等5个不同的角度采集影像,将用户引入了符合人眼视觉的真实直观世界。不仅能够真实地反应地物情况,而且还通过采用先进的定位技术,嵌入精确的地理信息、更丰富的影像信息[4]。该技术的优点为航高低,成像清晰,可以根据需要设置航高,受云层干扰少,方便起降,航摄周期短,获取数据速度较快。缺点为续航能力差,一次性覆盖面少,不适合大范围的航摄,而且无人机的载重有限,航时短,受气像条件的影响较大[8-14]。
1.2 三维激光扫描技术
三维激光扫描技术是一种先进的全自动、高精度、立体扫描测量技术。它是用三维激光扫描仪获取目标物表面各点的空间坐标,然后由获得的点云数据构造出目标地物的三维模型的一种全自动测量技术。三维激光扫描技术可以连续、自动、快速获取大量目标地物表面的三维点云数据,具有获取数据量大,精度高,不接触,全天候工作等优势[4]。其劣势为数据易受树木等物体的遮挡,数据量大,数据后处理速度较慢[20]。
1.3 传统的测绘技术手段
传统的房地一体测量主要采用解析法。采用全站仪、GPS接收机、钢尺等测量工具,通过全野外测量技术获取界址点坐标和界址点间距的方法。传统的测量方式工作强度大,外业采集作业时间长,效率低下,但是技术较为成熟,界址点精度较容易满足要求。
2 试验分析
2.1 试验区概况
试验测区位于陕西省汉中市镇巴县渔渡镇。镇巴县位于陕西省南端,汉中市东南隅,大巴山西部,米仓山东段,被誉为陕西省“南大门”,巴山主脊东西横亘,构成南北两个地理单元,成为嘉陵江、汉江两大水系的分水岭。境内沟谷幽深,山势陡峭,相对高差大。最高点海拔2 534 m,最低点海拔416 m,垂直高差2 118 m。地形以中山地貌为主,地势西北高,东南低,南坡缓,北坡陡。25°以上坡度面积占84.4%。不同高度、坡度组合,构成境内多样的地形地貌。测区为山间盆地,整体地势平坦,总面积约0.42 km2,建筑多为3至5层房屋,地形高差在10 m以内,地物类型包含房屋、农田、树林及池塘等多种地物。试验区范围如图1所示。
2.2 技术路线
应用无人机倾斜摄影测量技术获取试验区的实景三维模型,基于倾斜模型数据使用软件的三维测图功能进行三维测图,可以方便快捷的采集到建筑物顶部图形数据[5];通过地面三维激光扫描仪获取

图1 试验区范围示意图
地面房屋建筑的点云信息,使用点云数据和倾斜模型数据进行内业的多数据融合采集,可以用两种数据的优点相互补充,以达到高效准确的完成内业采集任务;利用传统的外业测量手段对零散房屋进行采集,并对房屋建筑的特征点进行外业实测及精度检校。多种技术手段融合开展房地一体测量工作的技术路线如图2所示。

图2 技术路线图
2.3 实施方案
2.3.1 无人机倾斜摄影测量
2.3.1.1 航摄设备
本次试验采用大疆无人机Matrice 600 Pro。该无人机由飞行器、遥控器及配套使用的 DJI GO App 组成,是一款为专业级行业应用领域打造的六旋翼飞行平台。配备定制的 DJI TM A3 Pro 三余度冗余飞控系统,具备业界领先的多重安全保障以及先进的智能飞行功能。快拆式起落架和已预装至中心架的可折叠机臂方便收纳及运输,且有效缩短起飞前的准备时间。Matrice 600 Pro 最大起飞重量达 15.5 kg,可搭载更多设备,满足不同领域的使用需求。采用的镜头为 RIY-DG4pros 。该镜头是目前睿铂技术含量最高的一款全画幅倾斜摄影相机,内置双高斯结构镜头和超低色散非球面镜片,可补偿像差、提高锐度值、降低色散,并且将光学镜头畸变率严格控制到千分之四以内,单镜头像素高达4 200万像素,总像素超过2.1亿像素。
2.3.1.2 数据获取
(1)控制点布设
像控点布设方案直接影响无人机倾斜摄影测量获取的倾斜模型数据的精度。在布设时应充分考虑试验区的特点,布设的像控点应分布均匀。像控点采用陕西省卫星定位连续运行基准站网网络 RTK 直接获取 CGCS2000 成果,观测时采用辅助对中杠对中、整平,每个像控点观测2次,取平均数作为最终像控点成果,这样既便于空三加密像控点刺点同时也可以提高成图精度[3]。本试验区范围内,间隔100~150 m左右布设一个控制点,根据试验区实地情况,本次试验共布设了 16 个像控点。
(2)航线设计
起飞前进行无人机和相机安全检查,寻找视野开阔,地势平坦的地方作为无人机起降场,观察空域内是否有高压线等障碍物,做好飞前准备。本次测试采用大疆M600PRO六旋翼无人机搭载DG4pros五镜头相机,以航向重叠80%,旁向重叠70%的重叠度,按地面分辨率1.4 cm采集数据,设计航速为8 m/s,测区航线外扩宽度100 m,航飞总面积0.57 km2,飞行高度105 m,飞行1个架次,共获取航片数约5 000张,影像清晰,满足建模要求[15-18],航线设计如图3所示。
(3)数据处理
航飞数据先使用SkyScanner软件进行数据预处

图3 航线设计示意图
理。软件可将获取的数据自动进行分盘、重命名、姿态解算并生成Context Capture软件支持的区块文件。由于倾斜摄影技术特点,航线需要外扩,边缘部分航线会产生许多冗余数据,影响处理效率。使用SkyFilter软件剔除冗余航片数据,提升空三加密处理效率。
剔除前航片总数共计5 000张,而使用SkyFilter软件剔除多余航片之后,有效航片数共计3 604张,空三加密时间为1小时,三维建模投入23台集群工作站,用时4个小时。本次试验中,重投影误差均方根(RMS)值为0.52 pixels。
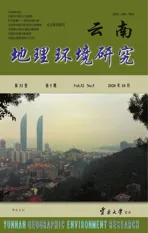
2.3.1.3 精度分析
在构建三维倾斜模型之后,应用传统测绘技术手段沿街道进行了外业实测,得到实测检查点29个,经过精度检测,该数据的中误差为4.8 cm,精度检测情况如表1所示。
2.3.2 三维激光扫描测量
2.3.2.1 设备准备
本次试验采用徕卡RTC360三维激光扫描仪。该扫描仪扫描速度为200万点/秒,精度高达12 mm×10 m,融合了徕卡三大核心先进技术:TruRTC实景获取、VIS视觉追踪技术、SmartReg智能拼接技术,使RTC360三维激光扫描仪与徕卡Cyclone Field 360外业操控软件、REGISTER 360智能拼接软件完美集合,操作智能、简单、高效。
2.3.2.2 数据获取
(1)规划路线
由于三维激光扫描仪的作业方式不同于传统测绘仪器,所以在外业扫描之前需要对外业现场进行踏勘,根据现场建筑物分布情况,合理规划扫描路线[6,7]。将整个测区分成几个小块进行作业,这样做可以更好地控制测区的整体精度,即便是后期内业处理发现问题也只需要小范围修正即可,路线规划如图4所示。
表1精度检测统计表

图4 扫描线路规划图
(2)外业扫描
外业扫描数据主要依托黑白标靶来实现绝对坐标的配准和点云坐标系统修正。使用徕卡Cyclone FIELD 360软件进行外业操控。该软件可以实时控制RTC360三维激光扫描仪进行作业,还可将数据同步回传至平板电脑,在外业扫描间隙就可以对数据进行实时的拼接和检查。
(3)数据拼接拟合
外业扫描数据采集完成后将其导入徕卡Cyclone Register 360智能拼接软件,对点云数据进行智能拼接。由于RTC360独有的VIS视觉追踪技术,数据在导入软件的过程中即可进行自动拼接。在外业扫描过程中,使用徕卡6.5寸黑白标靶在已知点设立标靶,后期在Cyclone软件中可以自动拟合标靶中心,用于绝对坐标匹配和转换。此次共使用7个控制点进行绝对坐标转换,转换后精度最大为4.9 cm,最小为1.7 cm,内符合精度满足房地一体测量的作业需求。
2.3.2.2 精度分析
在点云数据完成之后,采用传统测量技术手段沿街道对一级界址点进行了全野外实测,通过对内、外业测量点对比共选取了20个点进行精度检测,通过检验,该数据的精度中误差为5.41 cm(表2)。

表2 精度检测统计表
2.3.3 融合方法研究
通过对无人机航摄、三维激光扫描仪进行试验对比发现,无人机航摄需要在航飞前布设数量足够的像控点,航飞时间较短。航飞数据处理工作量较大,需要经过空三加密等多个步骤才能生成倾斜模型,后处理时间较长。利用无人机航测获取数据快的特点可以快速的完成外业的航测倾斜原始数据采集的任务,但航测数据普遍因像控点等多种原因导致数据精度比较差,细部变形严重。无人机倾斜数据在像控点足够密集的情况下可以基本满足精度要求,但细部数据的质量上难以满足要求[19]。
地面三维激光扫描仪因为采用先进的徕卡RTC360,无需使用标靶,无需精确对中整平,能够利用惯导及自身影像技术自动拼接,数据采集和数据生产效率较高,虽然在进行坐标转换时需要利用地面控制点,但转换所需控制点并不需要太多。其缺点是无法对高层建筑或遮挡密集建筑进行扫描,如果在测绘工作中加密纠正靶标点数量,可以进一步提高测绘精度。这两种方式的测量精度基本上处在房地一体测量项目精度要求的边缘,如果在数据生产的任何一个环节操作不当都极容易出现精度超限的情况。应用无人机倾斜摄影测量技术虽然获取了大部分房屋建筑的三维信息,仍无法解决由于遮挡造成的数据漏洞区。地面三维激光扫描技术可以从地面上对数据进行补充。由于三维激光扫描技术获取数据的相对精度较高,因此可以将三维激光扫描技术与无人机倾斜摄影测量技术进行互补。通过传统的测量技术手段,对于部分零散区域的数据进行补测,并选取多个特征点进行野外实测检验,有助于提高数据的整体精度,同时通过多种技术手段的融合,可以将外业数据快速地获取,减少了外业的作业成本。
3 结论与讨论
本文探讨了无人机倾斜摄影测量技术、三维激光扫描技术在房地一体测量工作中的应用。通过地面三维激光扫描技术与无人机倾斜摄影测量技术融合,并应用传统测绘方式对数据进行补充及精度检查,这种方法可以满足房地一体测量工作的需求。房地一体测量工作的内外业作业模式比较多种多样,但任何一种作业模式都有自己的优缺点,使用多技术融合作业方式,可以利用多种数据的优点去互相补充,以完善整个作业过程中的效率问题和精度问题。
尽管测绘技术手段取得了飞速地发展,数据获取的速度有了极大的提升,但是每种技术手段都存在其固有的优势与不足。因此,在实际的工作中,针对区域的特殊情况制定多种技术手段融合的具体措施,才能更好地形成房地一体快速测量工作的有效解决方案。