高动态迁移下无人机自组网路由协议研究∗
2021-01-19
(南京理工大学 南京 210094)
1 引言
近年来,多无人机(Unmanned Aerial Vehicle,UAV)协同作战在现代信息化战争中扮演着重要的角色。无人机在其“零生命”风险、适应恶劣作战环境上相对于人机有着巨大的优势。在军事领域,无人机集群作战拥有着单平台作战无法比拟的优势,可在战术侦察、多方位协同打击等任务中大显身手,因此一个可靠的通信网络至关重要。与传统的卫星通信高时延、高成本的特点相比,搭建一个近距离、低成本、低时延、高吞吐量的多跳自组织网络更能发挥无人机的能力。但是无人机集群通信网络是一个高动态性网络,需要适应高机动性、动态拓扑结构、间歇性网络链路和多变链路质量的通信环境[1]。移动自组网(Mobile Ad Hoc Network,MANET)有着多跳、自组织的特点,非常适合无人机群这种以空对空多跳通信来扩大网络覆盖范围的方式[2]。
目前国内外各高校研究机构相继开展了无人机自组网的研究[3]。王旭东[4]等提出了一种基于位置信息的速度加权OLSR算法,他将无人机节点的位置信息通过HELLO数据包进行传输,节点根据接收到的位置信息来计算该条链路的速度加权ETX值,并以此来辅助路由决策。Amira Chriki[5]等从网络通信挑战的角度对无人机自组网进行研究,揭示了用于解决无人机之间通信和协作问题的路由协议和移动轨迹模型设计思路。其次无人机迁移模型也是无人机自组网中的一个研究热点[6]。为了仿真高动态的机载网络,需要精确的节点物理移动模型,许多模型只是简单模拟了速度和方向的突变,这种运动方式是极端变化的非自然运动,是随机、无记忆行为,不适用于高机动性无人机节点[7]。本文利用基于内存的三维迁移模型--三维高斯马尔科夫移动模型(3D Gauss-Markov mobility,3D-GMM)来仿真无人机飞行行为。
本文采用NS-3网络仿真工具,针对无人机群组网的特定场景,对几种常见的MANET路由协议进行了对比,从吞吐量、丢包率、时延和时延抖动方面分析了几种协议的性能。对后续研究更适合无人机网络的路由协议做了先验性实验。
2 移动自组网路由协议
移动自组网(MANET)中的节点是自组织,自管理的,其通信过程中不需要借助任何预先存在的基础设施。此外每一个节点可以不同的速度和方向移动,这些速度和方向可能是不恒定的,也可能是随着时间的推进而迅速和不可预测地变化的。因此MANET被认为是一个无基础设施的移动网络,其中的每一个节点可以将数据包中继到另一个节点,再转发至目的节点。MANET非常适用于特殊的户外活动、没有无线基础设施的地区通信、紧急情况或者自然灾害以及军事行动。近年来,许多路由协议被提出应用于MANET,本文在性能分析中,选取了常见的MANET路由协议:OLSR,AODV,DSDV。
OLSR(Optimized Link State Routing,优化链路状态路由协议)是一种标准化主动式(或表驱动式)优化链路状态路由协议。它使用周期性消息广播机制来维护每一个节点上的网络拓扑信息。协议的关键技术就是选择中继节点(MPR节点)来转发广播数据包,其余非中继节点只接收而不转发数据包,以此来减小控制分组的泛洪范围[8]。最后根据跳数选择最优的路由链路进行数据传输。
AODV(Ad Hoc On-Demand Distance Vector Routing,无线自组网按需平面距离向量路由协议)是一种被动式(或反应式)路由协议。源节点通过广播RREQ消息发起路由查找,中间结点接收到后建立该节点到源节点的反向路径,然后转发,目的节点接收到后发送RREP应答消息,完成路由建立。在数据传输过程中,节点周期性地检查链路状态,更新路由信息;在没有数据传输时,节点之间不进行路由信息交换,因此极大地减少了路由开销和维护路由的成本[9]。
DSDV(Destination-Sequenced Distance Vector Routing,目的节点序列距离矢量协议)也是一种典型的主动式路由协议[10]。节点周期性广播探测报文来维护路由表。在路由表中,每条路由信息的序列号为路由度量,序列奇偶表示链路状态,序列号大的路由为最优路由选择。
3 移动模型:3D-GMM移动模型
模拟无人机节点在空中飞行的运动,必须遵循自然飞行规律。这就意味着一个无人机节点的路径不完全是随机的,它在任意时间、任意位置点上的下一步运动轨迹与速度取决于它之前的位置和速度矢量。因此,运动模型必须要有记忆性[11]。无记忆移动模型的特点是在方向和速度上存在非常急剧的和突然的变化。如NS-3内置的随机方向模型、随机行走模型、随机路点模型、恒定速度和恒定加速度模型[12]。
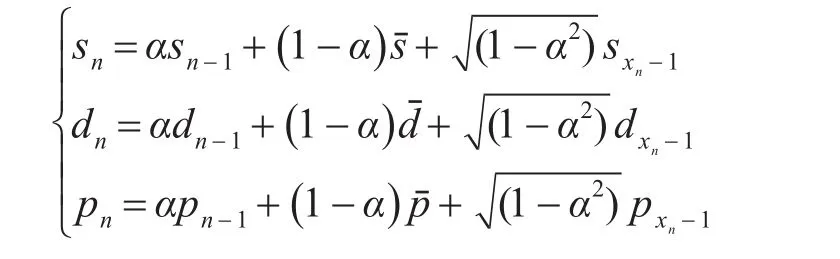
传统的二维高斯-马尔科夫移动模型中是一个相对简单的基于内存的模型[12]。其有一个调优参数α,决定了节点运动的内存量和可变性。在计算新运动状态时,每一个节点都有一个初始速度和方向,以及一个平均速度和方向,每一个时间步长内计算出下一刻新的速度与方向,并且每一个时间步长中重复如此。新的速度与方向矢量计算方式如下:

其中sn是第n时刻的速度,dn是第n时刻的方向向量,和是平均速度和方向参数,sxn-1和dxn-1分别表示遵循高斯随机变量分布的速度与方向上的变量。α是调优参数,其取值范围为α∈[0 , 1]。当α=0时,模型没有了高斯扰动记忆,新的速度和方向完全基于平均速度、方向变量和高斯变量这三个值的初始化量;当α=1时,运动将会失去所有的随机性,即节点将在一条直线上移动。所以设置0<α<1体现了运动模型不同程度上的随机性和记忆能力。
本文所使用的3D-GMM移动模型是将二维高斯-马尔科夫模型扩展到三维。在二维的基础上添加第三个变量来跟踪移动节点相对与地平线的垂直俯仰,如下所示:
其中pn代表了飞行速度矢量与地平线的实际夹角度。在根据公式计算出上述三个变量后,可以计算出一个新的速度矢量,该矢量映射到三维坐标系计算为
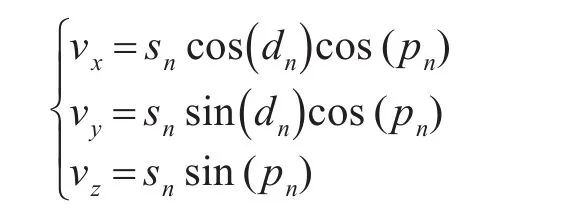
vx表示沿三维坐标轴x轴上速度,vy表示y轴上的速度,vz表示z轴上的速度。
通过上述方法可以根据前一刻节点的运动方式,获取到下一时刻的运动方式。图1表示在单个无人机在连续的时间中运动轨迹。
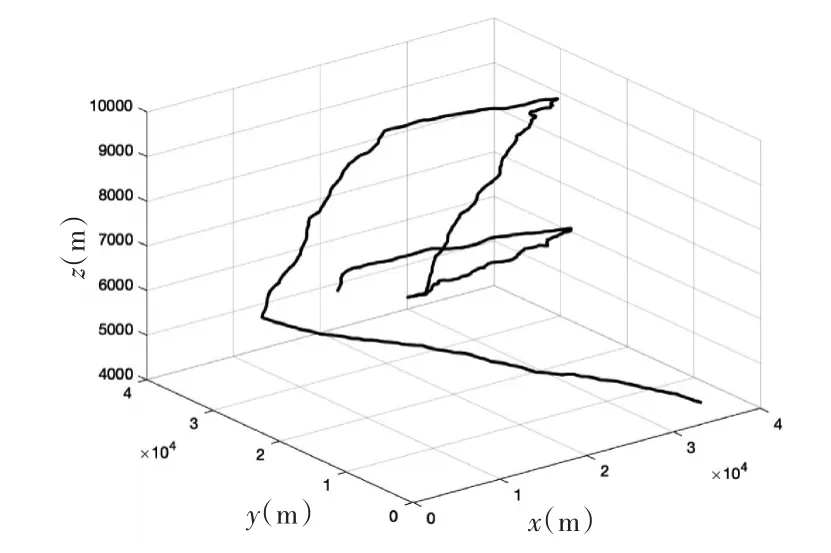
图1 单个无人机飞行三维轨迹图
4 仿真
我们在Ubuntu18.4 Linux操作系统中安装了NS-3,这是一个离散的事件模拟器,能够很好地仿真无人机群自由运动和网络事件的发生[13]。
4.1 仿真假设
在本次实验仿真中,我们模拟了无人机群在一个40km×40km×10km的区域内执行自由侦察任务的仿真状况,无人机群自由运动组成一个MANET网络通信。对仿真场景做出如下假设:
1)由于仿真区域较大且无人机体积较小,认为无人机是飞行区间中的一个质点,不考虑飞行期间碰撞问题;
2)假设飞行空间自由空间,设置NS-3无线传输模型为Free Space模型,在三维Free Space模型中,通信范围为一个以发射方为球心的球形;
3)忽略地面曲率,假设飞行空间为一个长方体形。
仿真参数详见表1。
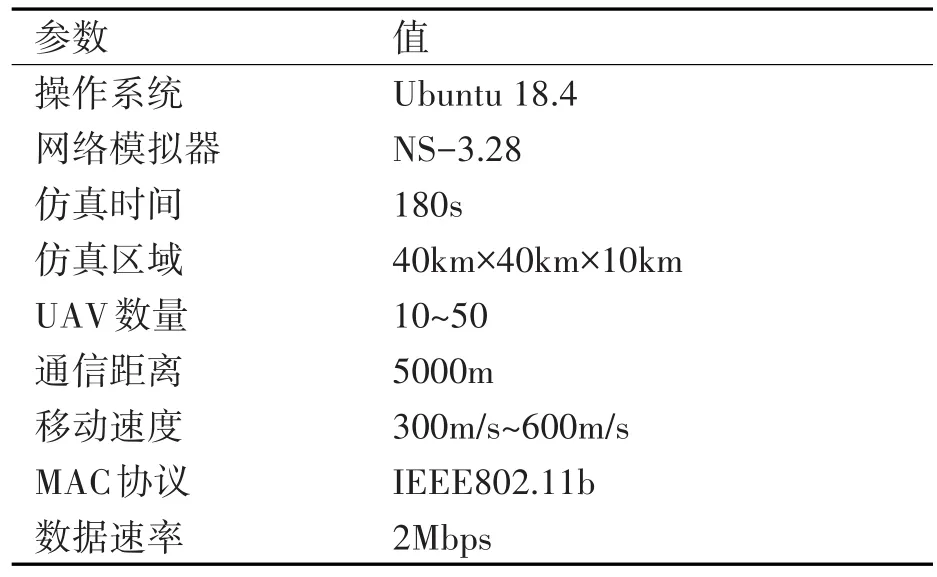
表1 仿真参数设置
4.2 仿真结果
在保持其他参数不变的情况下,改变节点数和节点移动速度这两个参数,对OLSR、AODV和DSDV三种协议的网络负载与网络迁移性进行分析。评价指标有平均传输时延、吞吐量、丢包率、平均时延抖动。网络性能在负载和迁移的情况下变化分别如图2和图3所示。
网络迁移性分析:在仿真实验中,我们以节点的高速移动来表现网络拓扑结构快速变化。设置10个节点以相同的移动速度遵循3D-GMM模型以不同的轨迹在自由空间中移动。统计了速度从300m/s递增到600m/s(递增量为50m/s)不同速度时期的路由性能指标,如图2所示。从图中可以看出在高迁移情况下,OLSR和AODV相比DSDV有着较高的吞吐量和较低的丢包率。但是AODV在时延和时延抖动方面不如OLSR和DSDV。DSDV较其他两种协议有着低时延、低抖动的特点,但是吞吐量低、丢包率高。在400m/s速度以上,OLSR性能表现优异,吞吐量高于其他两种协议,丢包率位于AODV与DSDV之间,时延性能接近DSDV,时延抖动也很平稳。
网络负载分析:在模拟中,我们选用了在迁移性仿真中各协议表现较好的550m/s迁移速度,节点数从10递增至50,节点递增量为10,统计不同网络负载下各协议的网络吞吐量、丢包率、时延和时延抖动表现,具体情况如图3。从图中可以看出,随着节点数增加,OLSR与DSDV的吞吐量高于AODV且有着上升的趋势,丢包率低于AODV且有着下降的趋势,并在40个节点后趋于稳定。而AODV在节点负载低的情况下有着吞吐量高,丢包率低的特点,但随着节点数增加,吞吐量随之下降,丢包率随之上升。在时延与时延抖动方面,随着节点数增加,各协议的时延都有增加且OLSR协议增加明显,AODV时延波动剧烈,其他两种协议平稳。
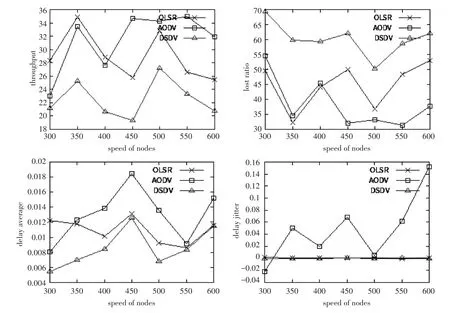
图2 网络迁移性能分析
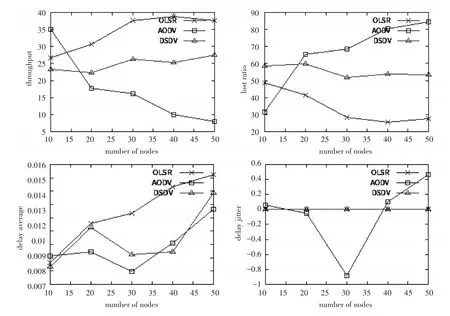
图3 网络负载性能分析
5 结语
在本文中,利用3D-GMM仿真UAVs在高迁移的机载网络场景飞行轨迹,比较了OLSR、AODV和DSDV路由协议以不同节点速度、不同节点数量下的四个性能指标,即吞吐量、丢包率、时延和时延抖动,并对其进行分析。在仿真结果分析中我们得出结论,OLSR与AODV在网络高迁移性环境下有着更好的吞吐量、更低的丢包率表现。但是AODV有着高时延的缺点,所以OLSR更适合高移动性的网络。同样在网络负载分析中,OLSR在吞吐量、丢包率和时延抖动性能最优,但有时延增加的缺点。至此,在高迁移的飞行自组织网络中,OLSR协议是组建Ad hoc机载网络较好的解决方案。
