带视觉导航功能的智能车机械结构优化设计
2021-01-16王英
王 英
(河北省廊坊技师学院,河北 廊坊 065000)
智能车视觉导航系统通过图像传感器获取预瞄区域内道路的车道线,进而可得到中心引导线;以图像传感器中心线为参考,可通过中心引导线计算出偏差,亦可通过相关算法完成路径识别;再通过决策规划,根据不同的偏差和道路类型(直道、弯道等),设定不同的目标速度和行驶路径;进而以目标速度和行驶路径分别作为速度和方向控制器的输入量。速度和方向控制器输出PWM信号分别控制电机和舵机的转动,同时通过光电旋转编码器形成速度反馈,进行智能车的速度和方向控制,实现智能车通过视觉自主驾驶的功能。本设计选择全国大学生智能车竞赛官方指定的C型车模作为主体,该车模采用两个直流电机驱动后轮,舵机驱动梯形转向机构完成前轮转向,文中采用阿克曼转向原理对转向结构进行了设计,建立了后置双梯形转向结构的数学模型,用MATLAB优化其结构参数,对摄像头安装结构、后悬架等其它部分都进行了优化,最后在此理论基础上制作了实车模型,进行了实验验证。
1 转向结构优化
在机械结构设计的前期,为方便进行结构参数的直接修改和优化,缩短设计周期,同时也为避免因多次结构改动而造成原模型车的损坏,减少资源浪费。采用SolidWorks制作1:1三维模型来仿真并优化,在优化过程中采用阿克曼转向原理。
1.1 阿克曼转向原理
阿克曼转向原理,是指轮胎在不打滑时,忽略左右侧轮胎因转弯时受力不均匀所造成的形变,车辆转弯时需满足转向原理,即后左右轮轴线与前左右轮轴向这三条线汇交与一点,如图1所示。此时,点O称为转向中心,R为转弯半径,δin和δout分别为左、右转向轮的期望转角。
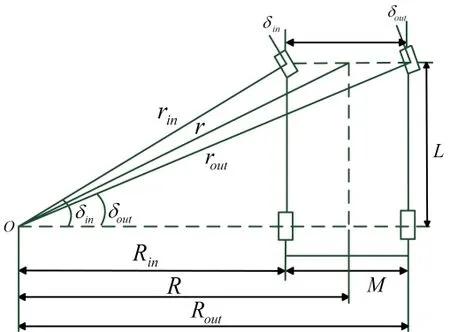
图1 阿克曼转向模型
从图1中,由数学关系可得,左右转向轮的关系式为:

式中:M——两主销中心的距离;L——轴距。
1.2 智能车梯形转向结构设计
参考汽车采用的转向梯形结构,设计出针对模型车的转向机构——后置双梯形转向机构[1]。该转向机构左右转向对称,能够快速响应转向动作,同时使左右转向轮最大程度地符合阿克曼转向原理,如图2所示。
忽略车轮转向主销定位的影响,图2中点A、B、C分别为左、右轮转向横拉杆和左、右转向节臂连接处球铰的中心,Z和Z0分别是左、右转向节臂的垂线并交于点O和E,故点O、E处于同一水平面上且分别为左、右轮转向节臂绕其转向主销的转动中心;Z1是转向轴的垂线并交于点F,则有Z∥Z0∥Z1;转向轴指示方向即为智能车前进方向,过O、E、F分别作平行于转向轴的线段X、X0、X1,并建立图示直角坐标系Oxyz、。
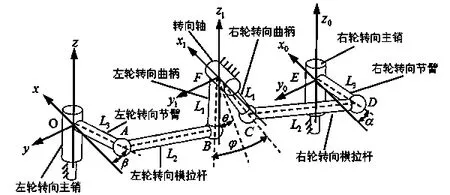
图2 后置双梯形转向机构示意图
在上述直角坐标系下,转向机构参数可以表示为:左、右轮转向主销距离OE=M,左、右轮转向曲柄长度为FB=FC=Ll,左、右轮转向横拉杆长度为AB=CD=L2,左、右轮转向曲柄夹角为φ,转向机构输入为左、右轮转向曲柄转过的角度θ(Z1为参考轴),输出为左、右轮转向轴转角β(x为参考轴)、α(x0为参考轴),则在坐标系Oxyz中,点A、B、C、D、E和F分别表示为:
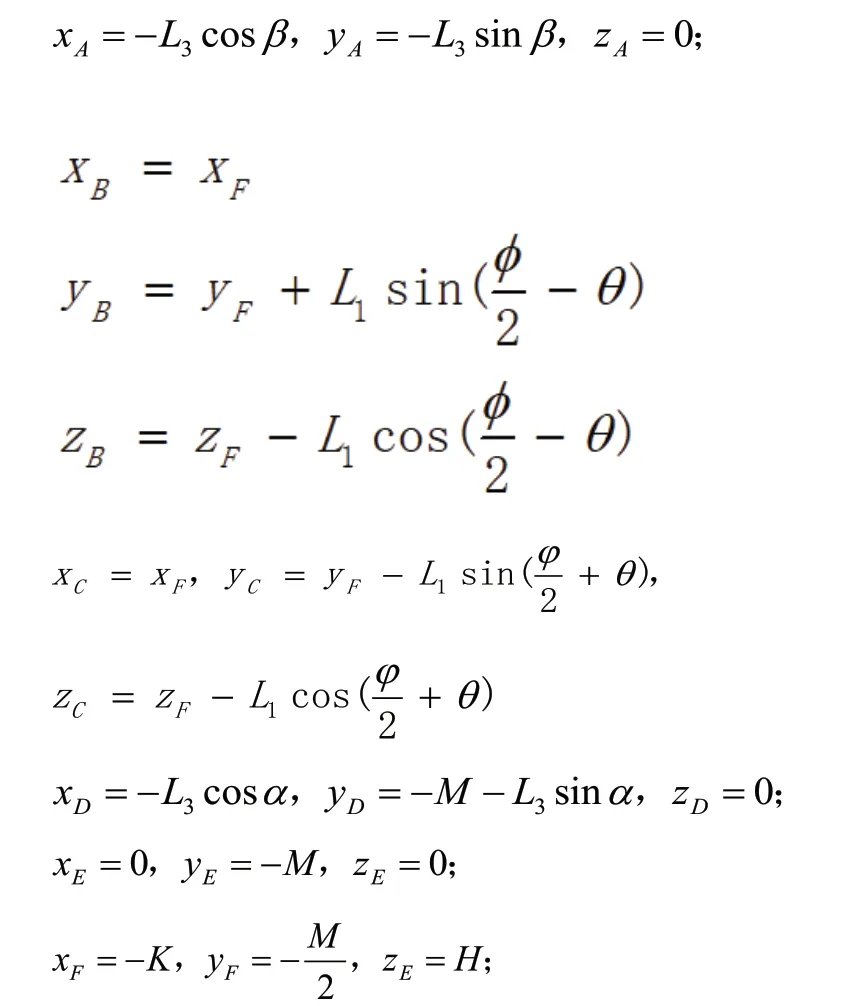
式中:H——点F距离点O沿z方向的距离;
K——点F距离点O沿x方向的距离;
因为转向机构在运动时左、右轮横拉杆长度应该保持不变,故:

将点A、B、C、D空间坐标代入式(1-2)、式(1-3),整理得出:

式中
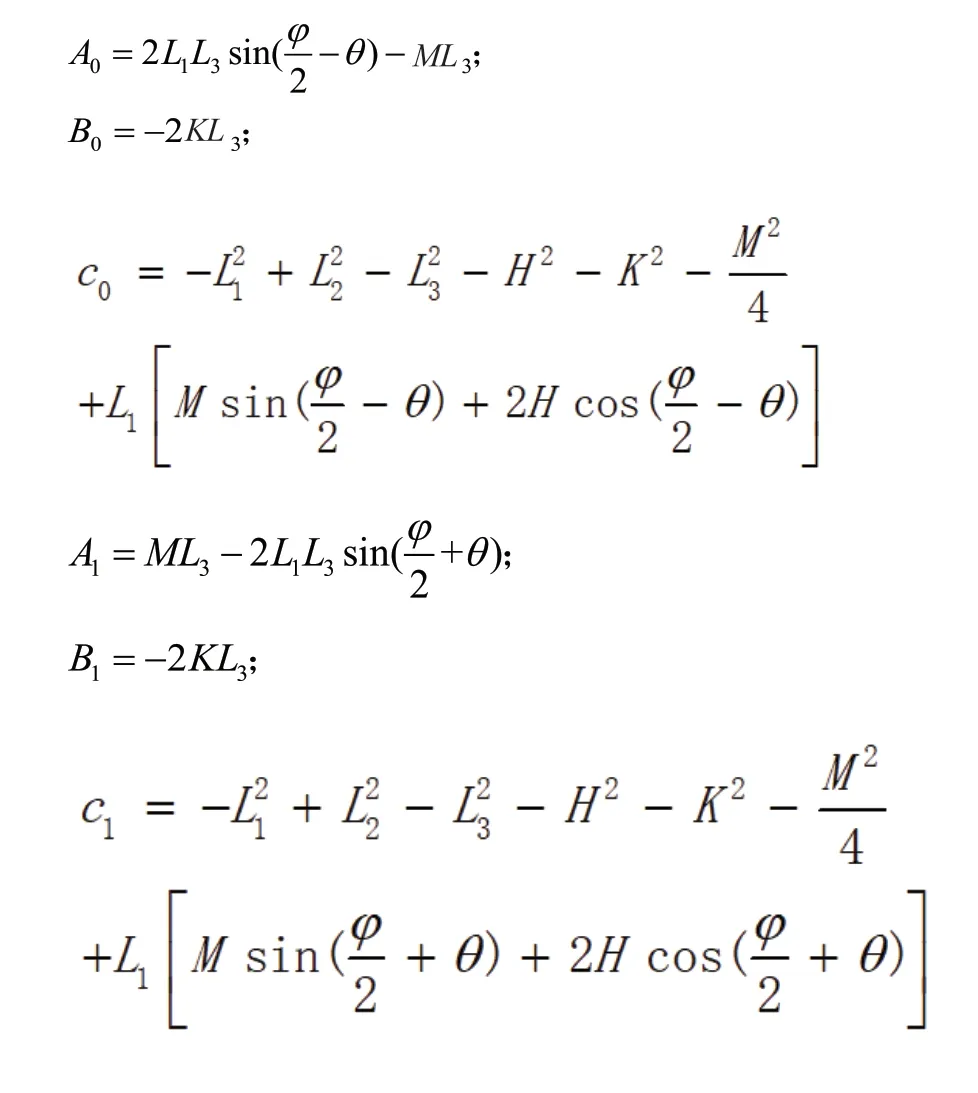
从式(1-4)、式(1-5)中可知,左、右轮转向轴β和α仅与转向轴输入θ和转向机构参数有关。运用万能公式并求解式(1-4)、式(1-5)可得:
式(1-6)和(1-7)中正负号根据实际情况确定。
当转向机构的转向轴θ不产生输入时,左、右轮转向节臂OA和ED与x、x0轴存在夹角ω,则此时后置双梯形转向机构的左、右转向轮实际转角φin和φ out分别为:

整理式(1-8)、式(1-9),消去转向轴输入角θ,得到后置双梯形转向机构左、右轮转角关系:

由式(1-10)关系知,输入左轮转角φin,后置双梯形转向机构输出一个对应的右轮转角φout,车辆转弯时φout应尽可能接近理论期望值δout。

故可以建立优化目标函数[4]:L3、K、H、M、ω系统已知,因此需优化变量X=[L1,L2,φ]。运用
确定一组机构参数使得目标函数值最小。建立约束条件,且MATLAB的优化计算函数对优化目标函数式进行优化计算,最终得到最优初始参数为:L1=34mm,L2=52.1mm,φ=25.5°,经过试验测试证明优化效果较好,如图3所示。实际和期望转角最大误差不超过2°,满足智能车系统控制的精度要求。
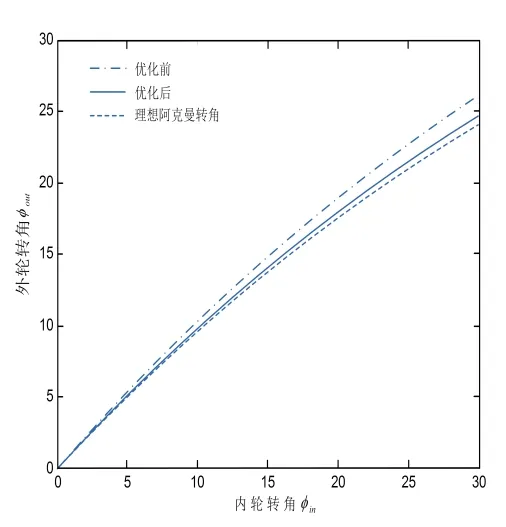
图3 梯形优化图
2 舵机安装及优化
经过前面的理论分析,得知智能车采用后置双梯形转向结构,且初始机构参数为:L1=34mm,L2=52.1mm,φ=25.5°。舵机的安装应尽量降低重心并保证安装结构的左右对称,使转向具有较高的灵敏性和对称性。综合考虑,舵机采用立式安装,舵机安装结构如图4所示。
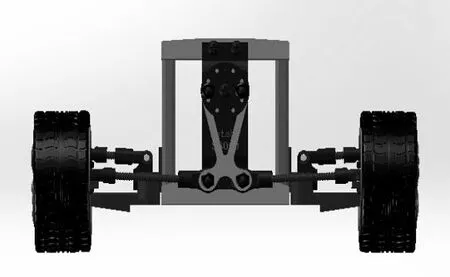
图4 舵机立式安装结构
3 摄像头安装位置
摄像头是智能车的“眼睛”,作为系统的前馈输入用来感知赛道的信息,摄像头安装的位置影响着摄像头前瞻的远近(如图5),而前瞻的远近决定着智能车提速空间的大小。由图5易知,摄像头安装位置越高视场越大,越靠近车身前部视场盲区越大,综合考虑后,摄像头安装在车身中心线偏后,距离车身高度合理的位置,此时摄像头视场距离车头最近为5cm,最远150mm,具有较小的盲区和足够大的视场,但是由于摄像头与竖直方向夹角较大,产生了较严重的图像畸变,故需要后续算法实行校正。
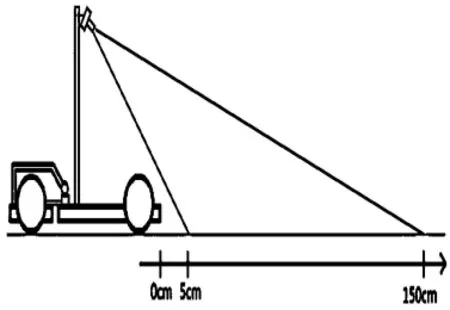
图5 摄像头位置与前瞻的关系
为了减少摄像头产生自身的震荡,一方面需要减轻摄像头支架的重量,另一方面需要增加摄像头支架的刚度,最终采用碳纤维杆作为摄像头支架的主桅和支撑杆,摄像头支架的结构固定件也采用铝制材料。最后,摄像头安装的方式如图6所示。

图6 摄像头安装图
4 后悬架及其它部分优化设计
4.1 后悬架优化设计
优化后悬架,一方面是因为智能车所行驶的赛道相对平坦,不会出现路面高低不平现象;另一方面,智能车相对速度较高,如果采用原模型车的被动悬挂结构,其智能车会在连续弯道行驶过程中车身产生不必要的震荡,影响图像采集的稳定性。最终采用硬连接方式,直接将车身与后桥相连,增加其刚度,如图7所示。
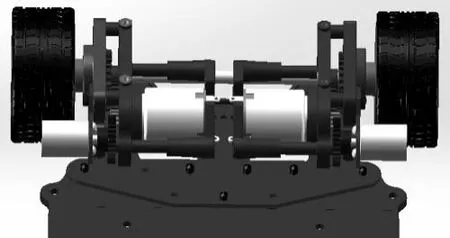
图7 后悬架优化
4.2 其他部分优化设计
其它部分的优化主要围绕齿轮啮合程度的调节、结构间隙的消除、重心的调整进行。左、右后齿轮箱齿轮较多,且啮合程度不合适,存在传动误差,需要调节齿轮啮合程度,直到齿轮间没有明显间隙且齿轮之间传递平顺;结构间隙主要存在梯形转向结构部分,需要添加适当的垫片以减小结构间隙;通过降低电池安装高度、降低主板固定高度等来降低整车的重心,同时需要保证整车结构的左右对称,即整车重心尽量靠近整车几何中心,优化完成后的智能车如图8所示。

图8 优化后智能车
5 小结
文中采用阿克曼原理及梯形结构设计了智能车机械部分,对后置双梯形转向结构建立数学模型,通过MATLAB优化其结构参数,在此基础上,确定采用立式方式安装舵机,并设计了舵机的安装结构。对摄像头安装结构、后悬架等其它部分都进行了优化,优化完成后制作了实车模型,在实验室搭建了智能车竞赛跑道,与之前没有经过优化的车采用相同的控制软件进行了实验,实验结果表明经过优化之后的车辆,在图像采集、转向、以及弯道加减速等方面具有良好的稳定性和附着力,实车能够取得更快的运行速度。
