浅析列车自动清洗机端洗仿形刷洗
2021-01-11刘翰林
刘翰林


[摘 要]仿形刷洗是列车自动清洗机的核心部分,关系到电客车端面的清洗效果。文章介绍了成都地铁两种不同的列车自动清洗机仿形刷洗的原理。一种是通过刷毛与车体端面接触的压力传感器反馈的电流信号时时调整电机运行速度,从而形成端洗仿形曲线。另外一种是通过预先计算出电客车端面仿形曲线,设定好变频器参数。从而控制电机运行速度从而形成仿形曲线。通过对比两种仿形原理,及雨刷器的防护措施,可以使以后地铁的洗车工作更加安全快捷。
[关键词]端洗;自动清洗机 ;仿形
[中图分类号]TH16 [文献标志码]A [文章编号]2095–6487(2021)10–0–02
Analysis of the end of automatic cleaning machine
Liu Han-lin
[Abstract]Imitation brush washing is the core part of automatic train washer, which is related to the cleaning effect of electric bus.This paper introduces the principle of two different automatic cleaning machines in Chengdu Metro.One is that the current signal feedback by the pressure sensor in contact with the end surface of the car body adjusts the motor operation speed from time to time to form the end washing imitation curve.The other is to calculate the imitation curve of the electric bus and set the converter parameters.Thus control the motor operation speed to form a imitation curve.By comparing the two imitation principles, and the protective measures of the wiper, you can make the future subway car washing work more safe and faster.
[Keywords]end washing; automatic cleaning machine; imitation shape
列車自动清洗机是对轨道交通车辆外表面进行清洗的一款自动化设备。端洗是列车自动清洗机的重要功能。在处理端洗仿形曲线的问题上,通常有两种方式:①根据刷毛与端面的挤压力而产生不同的电流值,确定刷辊的运动轨迹,形成闭环控制。②通过PLC、变频器预设好的频率、时间等参数而形成的端洗仿形拟合曲线,形成开环控制。
1 工艺流程
电客车进入端洗区域后,司机通过端洗对位指示灯来判断电客车是否已到位。到位后,洗车操作人员开启端洗装置。端洗机构自行动作,伸出刷辊,龙门架水平移动并靠近电客车端面。当龙门架到达指定位置时,刷辊旋转电机开始启动,刷辊开始旋转,并且提升电机启动,刷辊开始向上运动。刷辊垂直方向的匀速运动和龙门架水平方向的变速运动,一起构成了端洗仿形曲线。前端洗完成后,电客车通过侧洗,然后当后端面到达指定位置时,再进行一次后端洗。
2 机构简介
海德列车自动清洗机端洗机构是由左右两个沿轨道纵向移动的龙门架、可垂直摆动90°的刷组、提升机构、走行机构、摆动/
旋转机构、喷水装置等组成。水平方向由变频减速电机驱动行走,垂直方向由减速电机驱动。由水平的变速运动和垂直方向的匀速运动合成仿形曲线。
哈威克列车自动清洗机端刷洗机构由左右两个沿轨道纵向移动的龙门架、可垂直摆动90°的刷组、提升机构、走行机构、摆动/旋转机构、喷水装置等组成。通过PLC自动控制,使刷轴中心线运动轨迹拟合车体端部轮廓,来实现列车前后流线型车头两端表面的仿形刷洗,做到对流线型车头实施无死角刷洗。龙门架采用标准型钢焊接而成,经热浸锌防腐处理后表面喷日本关西涂料厂生产的重防腐底漆和面漆,既防腐又美观。刷轴采用铝合金拉成标准方管,表面氧化处理,强度高、重量轻,同轴度和直线度好,运行平稳且耐腐蚀,其他件为不锈钢材料;刷毛的成分由PE、PA组成,断面呈X形,表面可含清洗液,耐磨损且不伤油漆。列车走行至端刷洗工位后,司机根据指示信号停车,系统自动检测车辆停位是否准确。如果车辆停在允许范围之外,系统将提示司机重新调整位置;当车辆停在允许范围内,刷轴旋转90°后呈水平状态,通过提升系统的匀速运动与经变频调速后的水平走行运动合成,使端刷运动轨迹拟合车体端部轮廓,并通过传感器监控刷子旋转时刷毛与车体的接触压力,以达到最佳清洗效果。刷洗过程中喷淋管路按设定程序喷出洗涤剂和水,完成对端部表面的清洗。
3 仿形工艺
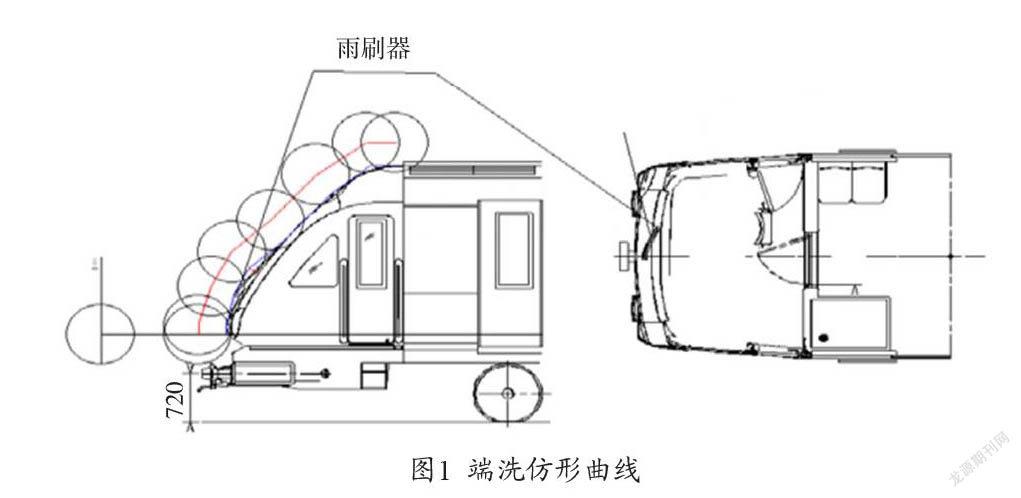
端洗机构主要用于列车前后端部的清洗。哈威克列车自动清洗机采用电流采样仿形技术,由电流模块及变频技术控制端洗刷辊的水平运动和垂直运动合成仿形曲线,如图1所示。刷毛与车体间的接触压力,可通过负载工作的电流反映出来。图2为哈威克洗车机人机界面,其中显示端洗刷辊空转时电流检测值分别为66和64。随着刷毛与电客车端面的接触,吃毛量不断地增加,电流检测值不断增大,当到达70时,说明刷毛与端面接触压力最大,然后变小。
为了保证清洗效果良好且对车体端面不造成损害,每一点的参考速度都可以通过控制系统软件根据车头的轮廓曲线计算出来,并根据端洗刷辊实际的负载电流和实际的吃毛深度的函数关系,预设相关参数,PLC与变频器进行通信,与实时传输过来的电流值进行比较、计算,从而控制、调整刷辊与车头端面的相对速度,通过进行升降运动的水平端刷及进行走行运动的端洗机构拟合成车头的轮廓曲线。
其仿形技术主要是通过PLC与变频器间的反馈控制实现的。PLC采用西门子S7-300系列,与上位机wincc系统采用工业以太网相连,与变频器采用Profibus总线连接,通信线路高速响应,高数据传输率,高可靠性。
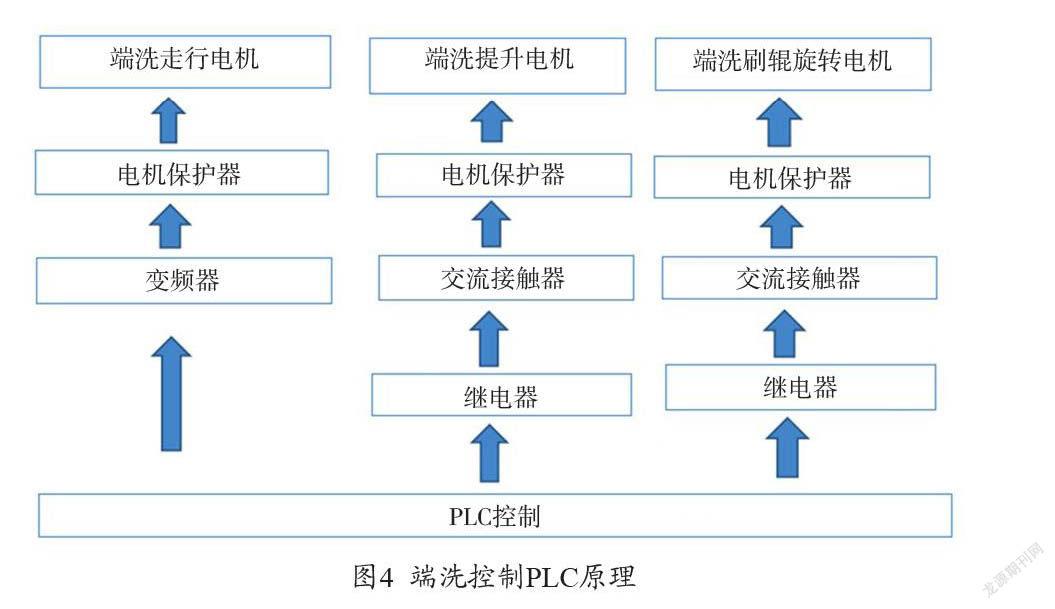
海德洗车机是通过预设PLC和变频器的频率、时间等参数来形成模拟仿形曲线程序,存储在PLC中。与哈威克洗车机不同,海德的端洗是开环控制,没有反馈信号,即需要提前在PLC中存储模拟曲线,根据实际车型进行调用。通过不断对某一种车型进行试验,确定龙门架的水平方向和垂直方向的运动速度和时间,从而形成针对某一种车型的端洗仿形曲线。其PLC采用西门子S7-200系列224 cn,变频器采用台达VFD007E43A。端洗PLC与主站PLC采用RS485通讯。当电客车进入端洗区域,触发光电开关,PLC端洗程序执行,端洗机构按设置好的仿形曲线进行动作(图3、图4)。
通过对比哈威克洗车机和海德洗车机两种端洗模式,可以看出哈威克洗车机端洗模式适应的车型更加广泛。因为哈威克洗车机是通过刷毛与车体端面相接触的压力来得到电机运行的速度和时间,有反馈信号。而海德洗车机的端洗模式适应性较窄,通过预先调试好的电机运行参数进行模拟端面曲线。
4 雨刷器的保护措施
列车端面的雨刷器主要由刷臂和刷片构成。雨刷臂的一端连接在端面的转动轴上,另一端连接在雨刷片上。在列车端清洗时,刷毛有可能对雨刷器造成损伤。原因:①刷毛在高速旋转下,与雨刷器紧密接触,对雨刷器产生较大的压力,有可能被刷毛打坏。②刷毛进入雨刷器的间隙中,由于高速旋转,发生缠绕进而拉伤整个雨刷器。
為了防止对雨刷器的损害,采取了以下3种措施:①前端清洗和后端清洗时,改变刷辊的旋转方向。当前端清洗时,刷辊的旋转方向为列车前进方向的逆时针方向。后端清洗时,刷辊的旋转方向为列车前进方向的顺时针方向,减少刷毛卷住雨刷器的可能性。②采用进口材料的刷毛,如PE、PA等多重合成材料,强度高、韧性好、耐磨损,能适应各种不同洗涤液;而且材料的韧性很好,如果和雨刷器发生缠绕,会产生弹性变形,给人员充足的反应时间按下急停按钮,停止刷辊运转。③在端洗位置安装无线网络摄像机,并通过路由器连入洗车机控制室的监控电脑屏幕。在端洗时,由洗车值守人员分别在现场和控制室进行监控,一旦出现雨刷器和刷毛发生干涉,立即按下急停按钮,保证设备安全。
5 常见故障及解决措施
常见故障及解决措施包括以下几个方面:①端洗刷辊不能推出。检查空压机是否正常运行,显示面板上压力是否已达到0.6 MPa。如果小于0.6 MPa,并且压力一直上不去,检查进气阀是否打开。若高于0.6 MPa,检查储气罐出去阀是否打开。若压力正常,检查PLC是否正常输出电磁阀打开的信号。②端洗刷辊推出不到位。检查端洗接近开关是否正常,PLC程序是否正确。③刷辊不转动。检查端洗刷辊的电机保护器是否跳闸,接触器触点是否正常闭合。PLC工作是否正常,有无输出信号,与主站通讯是否良好。检查电机是否正常运转。④端洗不能提升,走行运动。检查变频器是否正常,PLC是否正常。走行和提升电机是否正常工作。⑤自动模式下不能端洗。检查光电开关、端洗机构各接近开关是否工作正常,检查PLC是否有AC220 V输入,DC24 C输出。若都正常,最后检查PLC程序是否正确。
6 结束语
随着地铁线路越来越多,线网化运营,区域化运作模式将代替单一线路模式,实现车辆段资源的高效利用。因此,列车清洗机需要具备对不同车型的清洗能力。而且电客车端面的设计更加流线化,多样化,轮廓曲线也更加复杂。因此,自动化仿形技术在电客车清洗中起到了很重要的作用。
参考文献
[1] 铁道客车清洗技术条件:TB/T 2405—1993[S].
[2] 地下铁道设计规范:GB 50157—2003[S].
[3] 钟鸣,仿形技术在车辆端洗中的运用[J].中国新技术新产品,2010(4):17.
[4] 刘富强.基于PLC的地铁列车外皮清洗机研究[D].西安:长安大学,2014.