负载换流逆变器驱动电励磁同步电机无速度传感器模型预测控制方法
2021-01-11寇佳宝滕咏哮徐殿国
寇佳宝 高 强 滕咏哮 徐殿国
负载换流逆变器驱动电励磁同步电机无速度传感器模型预测控制方法
寇佳宝 高 强 滕咏哮 徐殿国
(哈尔滨工业大学电气工程及自动化学院 哈尔滨 150001)
负载换流逆变器(LCI)驱动电励磁同步电机控制系统广泛应用于中高压场合,在应对干扰和负载变化上,较大的系统惯性系数和较低的开关频率导致其动态响应性能欠佳。该文提出一种基于LCI驱动电励磁同步电机的无速度传感器模型预测控制方法。首先根据LCI的数学模型建立预测状态方程,同时给出合适的代价函数和约束条件;然后分析负载换相模式下的控制矢量模型,给出速度观测器的设计方法和参数选择依据,并针对负载变化对速度观测产生的影响进行分析和补偿。同时该观测器还能够同时实现逆变桥输入电压和端电压相位的观测;最后,通过3.75kW的LCI驱动电励磁同步电机实验平台对提出的无速度传感器模型预测控制方法进行实验验证。结果表明所提出的控制方法能够有效提升系统的动态响应性能,所设计的观测器具有可行性,速度观测结果在额定阶跃负载下误差小于13°。
负载换流逆变器 电励磁同步电机 无速度传感器 模型预测控制
0 引言
负载换流逆变器(Load Commutated Inverter, LCI)驱动电励磁同步电机具有容量大、成本低、可靠性高和控制简单等特点,因此该驱动系统被广泛应用于高速精轧机、大型燃气轮机、抽水蓄能电站及其他风机泵类等中高压场合[1-4]。在高速精轧机的工况应用中,驱动系统需要在钢材加入后快速稳定在预定转速上,这就要求所采用的控制算法在负载快速变化时有着较好的动态响应特性。如果稳定转速效果不佳,会导致轧制钢材的堆积和产品加工失败。而好的动态响应能力能够有效减小变载时的速度变化,缩短速度恢复时间,从而直接提高成品率和钢品质量。在大型燃气轮机、抽水蓄能电站及其他风机泵类工况应用中,更高的动态响应速度能够使系统更好地应对干扰和负载变化,从而提高机组起动的成功率和系统的稳定性[5]。
模型预测控制由于建模难度低、鲁棒性和稳定性较高、动态响应性能好等优势逐渐开始取代传统控制方法。但它同时存在稳态波动大、计算量大等问题[6-10]。而LCI驱动电励磁同步电机系统惯性系数高,这可以抑制模型预测控制带来的稳态波动问题。由于LCI采用半控型晶闸管器件作为其电力电子器件,因此其控制频率通常仅为几百赫兹,不过较低的开关频率相比其他驱动系统来说,为算法在线运行留出了更充足的计算资源。文献[10-11]提出了一种基于LCI的模型预测控制方法,该方法采用多级控制,但只有部分采用了模型预测控制,因此所采用的模型预测控制实际应用效果受到了其他控制器的限制。
此外,传统的机械式传感器安装繁琐,难以保证其安装同轴度,可靠性也较低。在一些特殊工况下,如高温易爆和水下场合,甚至无法完成机械式传感器的安装。目前无传感器控制方法已有丰富的研究成果,但大多都集中在永磁同步电机、异步电机及开关磁阻电机等[12-15]。文献[16]设计了一种基于电励磁同步电机的速度观测器,但并未考虑负载变化给观测带来的影响。文献[17]设计了一种速度观测器,但负载换相模式给速度观测带来的影响未被考虑。
本文基于LCI驱动电励磁同步电机控制系统提出了一种无速度传感器模型预测控制方法。提出的单级模型预测控制方法能够避免多级控制带来的木桶效应,提高系统的动态响应性能,降低硬件成本并提高系统运行的可靠性。本文首先分析了LCI模型,推导了系统的预测状态方程,并给出相应的代价函数和参数约束。然后分析负载换流模式下的矢量模型,设计了一种适用于高速阶段的多参数观测器并给出了参数选择依据,同时针对负载换相模式运行特点和负载变化给观测带来的影响进行了补偿。最后通过3.75kW的LCI驱动电励磁同步电机实验平台对提出的无速度传感器模型预测控制方法进行了实验验证。
1 LCI驱动电励磁同步电机模型预测控制
1.1 LCI驱动拓扑数学模型
图1为LCI驱动器拓扑结构。该结构主要包括整流桥、逆变桥及平波电抗器三部分。图1中rec为整流输出电压,inv为逆变输入电压,dc为直流母线电流,dc为平波电抗器电感,dc为直流母线等效电阻。
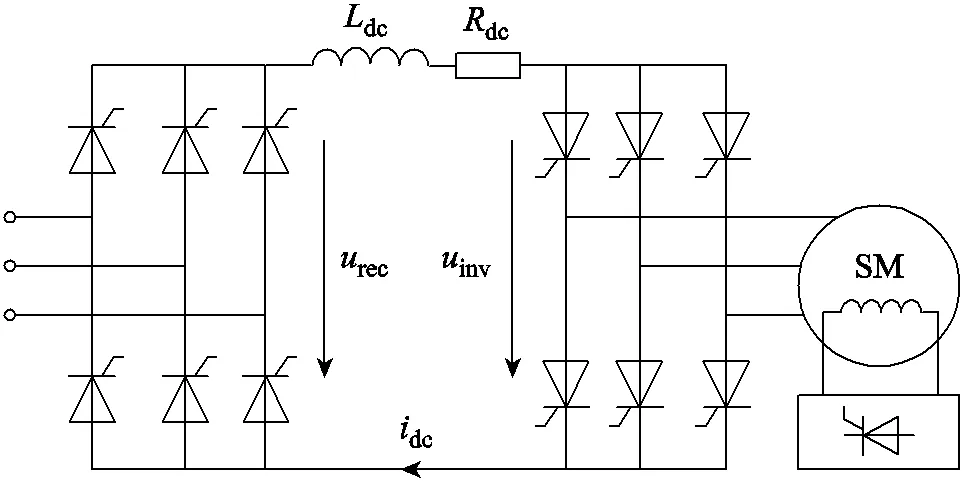
图1 LCI驱动器拓扑结构
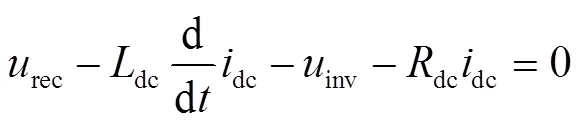
以LCI回路建立等效电压模型,其表达式为
对于其中的三相全控整流桥来说,其输出电压与网侧电压的数学关系为

式中,s为网侧相电压有效值;为整流桥的触发延迟角。
在LCI驱动器中,整流桥与逆变桥具有完全相同的拓扑结构,仅有能量流向相反。在控制策略上,整流和逆变通过改变触发延迟角即可实现相互切换。为了实现与整流桥相反的能量流向,逆变桥的触发延迟角需要大于90°。因此,逆变输入电压数学表达式可表示为

将式(2)和式(3)代入式(1)中,则LCI回路电压方程可表示为

电机的机械运动方程为
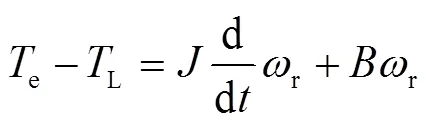
式中,e为电机的电磁转矩;L为负载转矩;为轴系转动惯量;为粘滞系数;r为转子的机械转速。
忽略逆变桥的能量损耗,电机的电磁转矩可以表示为
当电励磁同步电机采用恒励磁电流控制时,uinv/idc可近似为定值。将式(6)代入式(5)中,电机的机械运动可表示为