基于机器视觉的金属结构变形测量
2021-01-11谢柳辉冯晓蕾王进举任泓宇
谢柳辉,冯晓蕾,周 晓,王进举,任泓宇
(1.广东省特种设备检测研究院 东莞检测院,东莞523003;2.武汉理工大学 机电工程学院,武汉430070)
随着我国基础设施的不断建设,金属结构的应用场景越来越多。金属结构受到外力会发生形变,因此须要检测大型结构的塑性变形参数,目前的测量大多采用仪器测量法、 传感器测量法、GPS 测量方法等来实现[1-6]。仪器测量法存在测量速度慢、无法同时测量多点以及测量精度易受操作人员影响等问题[1-2];传感器测量法会对测量对象本身造成干扰[4];GPS 测量方法设备体积大,精度不高[7]。
因为基于机器视觉的图像测量技术具有非接触、远距离、高精度、测量范围大等[8]优点,近年来被广泛应用于医学诊断、工业测量、航空航天等领域[9]。然而视觉图像测量系统的精度受光源、待测目标特征、相机的抖动等影响较大[8],难以在远距离测量时达到亚像素测量精度。
为了提高测量精度,在此设计出一种特殊的靶标系统,与光源进行无缝贴合,解决了其他视觉测量方案中光源不稳定,采集的图像噪声大等问题,然后通过将特殊靶标和亚像素边缘检测算法结合在一起,构建成亚像素精度测量系统。
1 金属结构变形测量系统组成及工作原理
基于机器视觉的金属结构变形测量系统由光源靶标系统、图像采集及处理系统组成,如图1 所示。
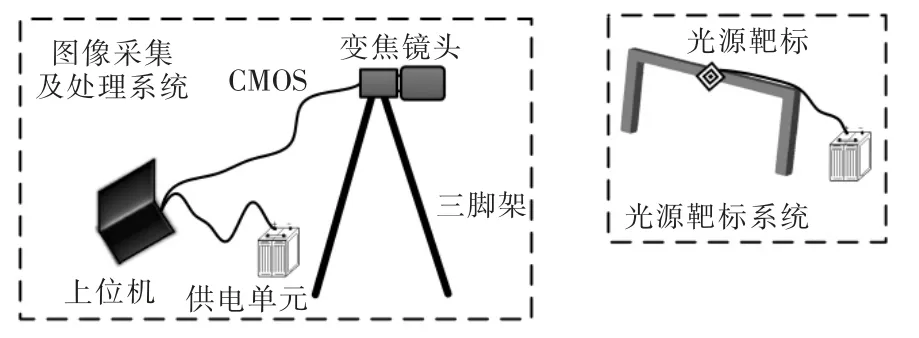
图1 基于机器视觉的金属结构形变测量系统组成Fig.1 Composition of metal structure deformation measurement system based on machine vision
首先将光源靶标固定于待测点,再将图像采集系统固定于测量位置,利用图像处理系统求出待测点的位移。
系统的工作原理如下:测量时,光源发射出均匀的光线,经过由菲林制作的靶标。由于菲林的特性,光线一部分透过靶标的透明区域,其余部分被黑色区域遮挡,图像采集系统获取到与靶标图案一致的图像。当待测位置发生形变时,固定在上面的光源靶标会产生相同的位移。图像处理系统首先对获取到的靶标图像进行预处理;利用传统边缘检测算法获取靶标白色区域的最外侧像素边缘点坐标;利用亚像素边缘检测算法进行校正;通过菱形约束算法获取相机坐标系中靶标的中心亚像素坐标;通过坐标转换算法得到靶标的物理水平和垂直位移量。整个测量系统的流程如图2 所示。
2 系统设计与实现
光源靶标系统由光源、靶标、供电单元构成,如图3 所示。光源采用菱形LED 面灯,如图3a 所示;靶标的制作利用菲林输出技术,在菲林片上形成黑色和透明相邻的区域,如图3b 所示;利用菲林靶标的单面黏性,无缝贴合在光源面板上组成光源靶标系统,如图3c 所示。
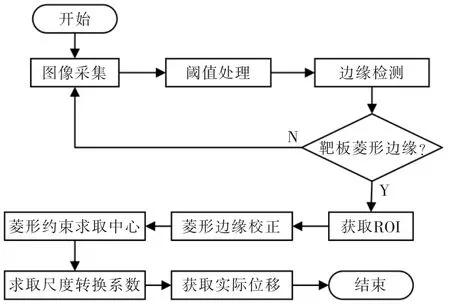
图2 系统测量流程Fig.2 System measurement flow chart
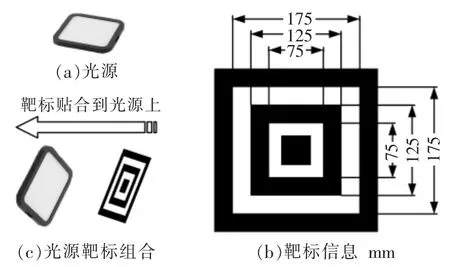
图3 光源靶标系统组成Fig.3 Composition of light-target system
图像采集系统主要由工业相机、镜头、上位机、相机驱动软件、供电单元及三脚架等组成。相机和镜头固定在三脚架上,与上位机相连接;利用上位机软件采集处理图像,其安装过程相比于其他测量系统简单、省时。
3 图像处理系统研究
图像处理系统通过对靶标图像进行处理,得到靶标中心在像平面的位置。通过大型结构变形前后的靶标中心位置之差以及尺度转换系数,就可以获取到待测点的形变量。
图像处理系统主要由3 个部分组成:图像去噪、靶标中心定位追踪、坐标转换。
3.1 图像去噪
由于光电系统的基本特性,图像采集系统获取的图像是真实图像与随机噪声的叠加。因此,为了获取质量更好的图像,需要对图像进行滤波操作。图像高斯滤波是在二维空间利用正态分布计算平滑模板,并利用该模板与灰度图像做卷积运算,对于图像中随机噪声的处理具有很好的效果。对试验中获取的图片中ROI 区域进行高斯滤波前后对比,处理结果如图4 所示。
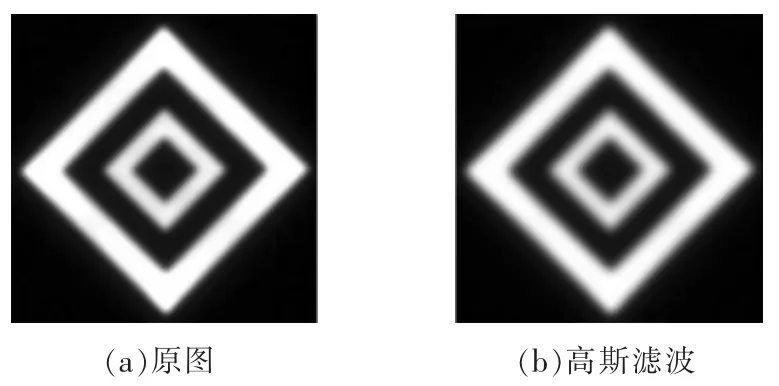
图4 图像噪声处理Fig.4 Image noise processing
3.2 靶标中心定位追踪
靶标中心定位追踪有3 个步骤:菱形边缘粗定位;菱形边缘亚像素定位;利用菱形约束计算中心。各步骤操作结果如图5 所示。
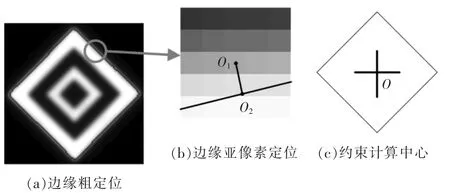
图5 靶标定位追踪Fig.5 Target location and tracking
步骤1菱形边缘点粗定位。图像处理系统采用阈值处理和区域边缘追踪来定位像素边缘点,图像处理系统的边缘点粗定位结果如图5a 所示。
在靶标中,同心菱形之间的黑色和透明区域相等,但是由于数字相机特性的影响,获取到的图像中亮环比暗环宽,如图6a 所示。为获取菱形的真实边缘,对图像进行了阈值处理。在阈值处理后的图像中,对应的亮环和暗环宽度相等,如图6b 所示。
对阈值处理前后图像中对应相同的区域,进行灰度值绘制。x1x2和x2x3分别为阈值处理后的亮环、暗环的宽度,如图6c 所示。有

阈值处理后,应用区域边缘追踪算法提取最外侧菱形的像素边缘点,在此采用文献[10]提出的边缘追踪算法。
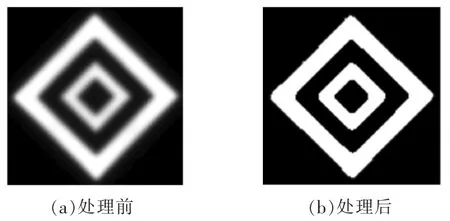
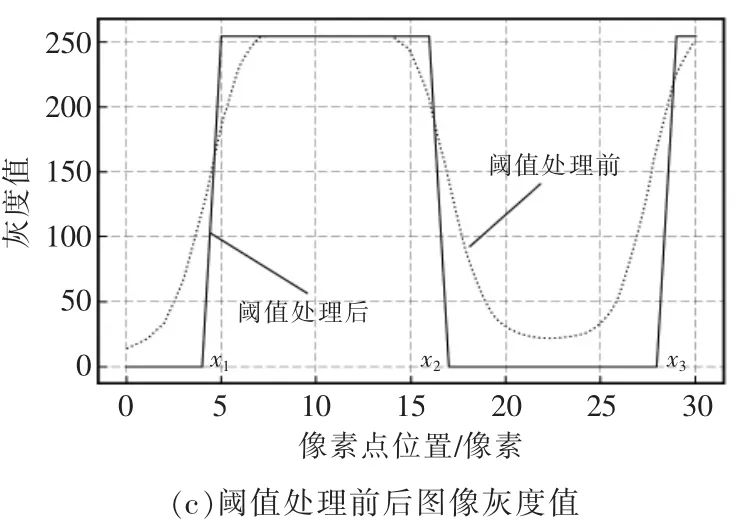
图6 阈值处理Fig.6 Threshold processing
步骤2菱形边缘亚像素定位。在图像采集系统获取图像时,像素的灰度值由对照射像素区域上的光照进行积分得到。因此,获取到的像素边缘,实际上是一块包含真实边缘的区域。文献[11]提出利用以像素边缘点为中心,周围5×5 像素区域的空间矩来计算相应的真实边缘,即亚像素边缘。像素边缘点O1和定位的亚像素边缘点O2如图5b 所示。
步骤3菱形中心计算。定位出菱形四条边的亚像素边缘后,利用菱形的对边平行特征对边缘线进行约束,设两平行对边的方程分别为

式中:k为边缘线的斜率;b1,b2分别为对边边缘在y向上的截距,像素。
然后,利用菱形的亚像素边缘点坐标,进行对边边缘线的最小二乘拟合,即

式中:(xi,yi),(xj,yj) 分别为2 条对边的亚像素边缘点坐标;n,m分别为2 条对边的边缘点个数。
利用最小二乘拟合求解出菱形的4 条边的方程后,可以求出4 条边的4 个交点(x1,y1),(x2,y2),(x3,y3),(x4,y4)。根据这4 个交点即可求出菱形的中心坐标(x,y),即

3.3 坐标转换
经过靶标定位追踪,得到的靶标中心是在像平面中的坐标,需要经过转换系数将其转换为物理世界中的坐标。坐标转换原理如图7 所示,尺度转换系数s为

式中:s为尺度转换系数,mm/像素;A2B2为物体物理尺寸,mm;A1B1为物体像平面尺寸,像素。
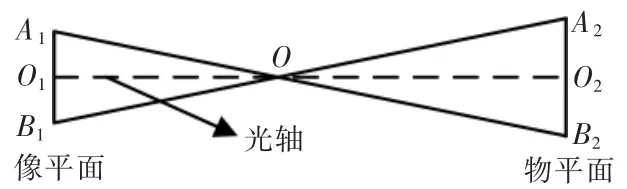
图7 坐标转换Fig.7 Coordinate transformation
对应到该系统中,有

式中:l为菱形物理边长,mm;L为对应的菱形图像边长,像素。
4 结语
基于机器视觉的金属结构变形测量系统,在理论上具有亚像素测量精度,且抗干扰性强,在远距离测量物体变形领域具有较好的应用场景和研究价值。
