基于功能分析的高价值专利判断方法研究
2021-01-11曹国忠王圣坤
郭 烨,曹国忠,王圣坤
(1.河北工业大学机械工程学院;2.国家技术创新方法与实施工具工程技术研究中心,天津 300401 )
功能分析(Functional analysis,FA)是一种直接着眼于产品功能的设计分析方法。功能是对技术系统或产品能完成的任务的抽象描述,能够反映产品所具有的特定用途及各种特性。它是从技术实现的角度对设计系统的一种理解,是指某一系统所具有的能量、物料、信息或其他物理量转化的特性,是其输入量和输出量之间的关系[1]。通过功能分析,可以识别专利产品系统或超系统组件的功能、特点以及成本,便于更好地认识专利产品。
高价值专利一般是指技术含量高、市场效益好、能够引领产业发展、在战略性新兴产业和特色优势产业中形成的具有较强前瞻性的高质量专利或专利组合[2]。不同的学者对高价值专利有不同的定义,但都注意到了技术水平对高价值专利的重要意义[3]。目前已有的专利价值评估方法主要分为基于资产的评估方法与基于指标体系的评估方法两类[4]。
基于资产的评估方法主要以成本法、市场法和收益法为主,这些方法大都源于资产的价值评估,过于注重经济方面的因素,依赖于单一方面的评价,往往不能做出准确的评估。
基于指标体系的评估方法通过选取与专利价值密切相关的指标,并建立评估指标与专利价值之间的联系,为各项指标打分,将各项指标加权求和得出专利价值度。评估指标一般分为定量指标以及定性指标两类。其中;定量指标受限于数据信息的可采集性具有一定局限性;而定性指标受人为因素影响、对评估人员的专业性要求较高。
价值专利的核心在于其技术水平的高低,但目前的专利价值评估方法中,很少有从专利技术自身拥有的特征属性出发进行价值分析。此外,对专利进行功能和结构的分析,可以进一步进行专利技术的改进及专利规避。因此,从功能分析的角度对专利产品进行价值评估,具有进一步研究的意义。本文提出了一种基于功能分析的专利价值评估方法。首先使用定量指标剔除低价值专利,通过功能分析划分专利技术领域的功能模块,并从功能、性能、成本及有害功能分别对专利进行评价,最终确定专利价值度。区别于传统的价值评估方法,本文更趋向于从专利的技术层面来诠释专利的价值,并且定性评价部分对专业性要求低,除对专利的整体评价外,通过模块划分可了解专利局部技术价值的高低,更有助于企业对专利的筛选利用。
1 专利价值初步筛选
高价值专利在专利总量中只拥有极小的占比,想要在茫茫的专利海洋中挖掘出高价值专利,往往需要巨大的人力物力。为了能够更加快速地挖掘高价值专利,在专利分析前先对专利数据进行筛选,将大部分低价值专利剔除,可以有效提高工作效率及节省成本。客观定量指标拥有数据易获取、分析处理方便、可对大量专利进行评估的特点,本文综合分析专利的技术、法律等相关影响因素[5],选取了如下指标。
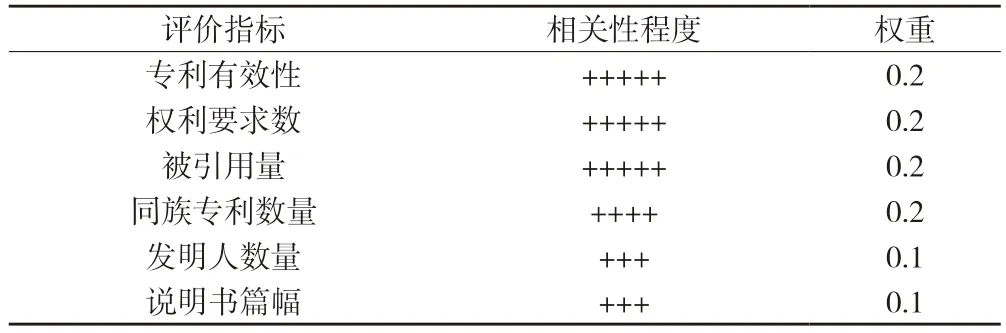
表1 初筛评价指标及其权重
定量指标的价值度为各个指标标准值与对应权重的乘积之和。具体计算公式如下:

专利初步筛选的总体流程如下:
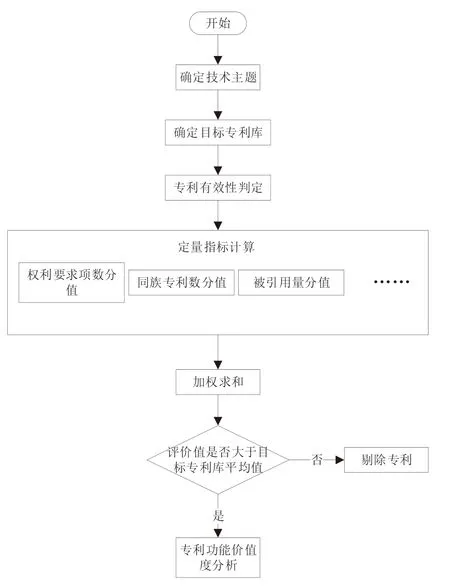
图1 专利筛选流程
2 基于理想化水平的价值评价公式
理想化水平理论是TRIZ 理论中的重要概念之一。TRIZ 理论认为产品进化的过程就是理想化水平提高的过程,专利价值的核心是技术创新,创新的目的是实现产品的进化,最终达到或接近最终理想解[6]。技术创新体现在专利所实现的功能及性能上,专利功能、性能和成本之比又一定程度上代表了专利在市场上的竞争能力和盈利情况。故可用理想化水平作为专利价值判断的依据。以下为 TRIZ 中关于理想化水平的一种表达形式[7],

式(2)中,Ideality表示理想化水平;F表示有用功能;P表示性能;Cost表示成本;Harms表示有害功能;α、β为调节系数。
在专利价值评价过程中,理想化公式(2)中α为调节系数,只起到放大的作用,在专利比较过程中并无影响。为便于专利间的技术比较,在此提出功能模块的概念,功能模块为专利中实现某一子功能的系统元件集合。考虑到专利自身的特色,将理想化水平公式进行修改,提出专利功能价值度计算公式:
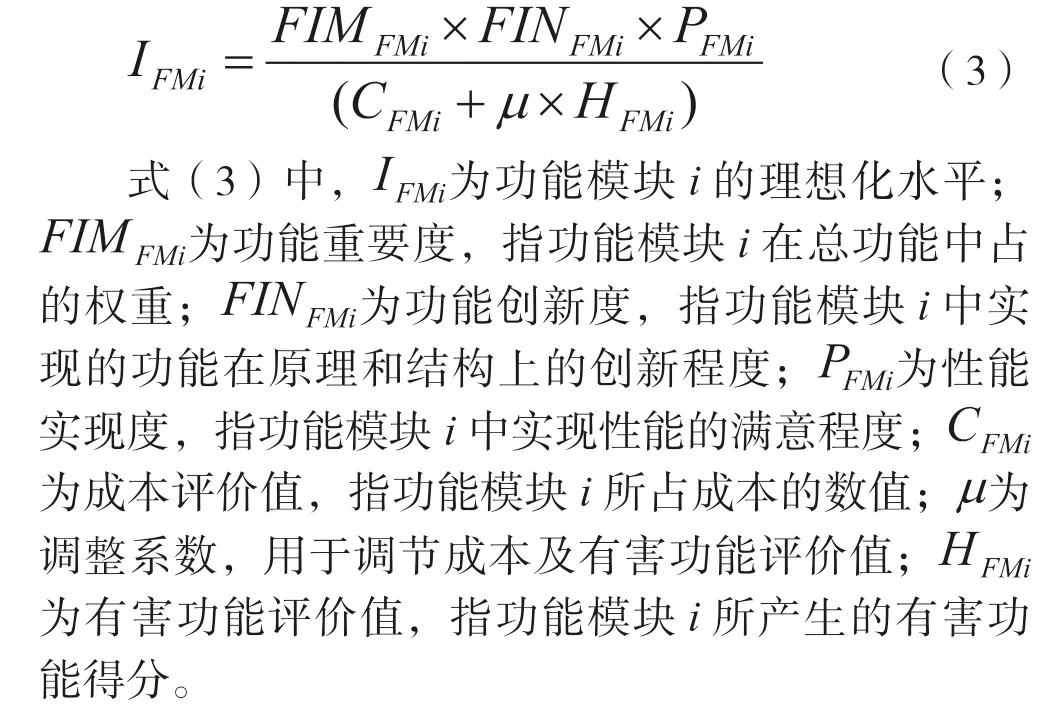
专利所提出的技术方案是否有效,其内在价值是多少,最终可以在理想化水平上体现出来。专利产品实现功能越多,性能越强,而成本越低,产生的危害越少,则说明其越有价值。计算专利的功能价值度,需要对功能重要度、功能创新度、性能实现度、成本评价值以及有害功能评价值进行求解。
3 基于功能分析的评价系数计算
3.1 专利功能模块的提取
对于实现相同或相似目的的专利产品,其对应的底层功能往往是相同或相似的[8],而不同的专利产品又会有不同的性能和特性,从而衍生出独有的功能。因此,本文将专利产品的功能分为两类:共有功能和个性化功能。共有功能为同类专利中都具备的通用功能,其特征是为达成该类专利的使用目的而存在的必不可少的功能;个性化功能为专利技术中所包含的非必要功能,其特征为该功能是为更好地满足用户需求而存在的并非所有专利都存在的功能。根据上述的功能分类可将功能模块分为以下两类:共有功能模块与个性化功能模块。
功能分析可以探究各元件间的相互作用关系与性能表现,进而可以阐述元件在系统中所起到的作用。专利产品的功能分析可以分为以下几个步骤[6]:
(1)确定元件、制品以及超系统。元件是实现功能的重要组成部分,在这里将功能模块视作元件。制品是产品的最终作用目标,例如,果实采摘装置的制品即为果实。超系统是独立于系统之外,却又为实现系统的功能必不可少的外部环境,例如,升降路障的超系统为地面。
(2)进行作用分析。功能体现在制品、元件与超系统之间的作用关系上。根据功能模型中作用关系实现的程度不同,可将其分为标准作用、不足作用、过度作用以及有害作用。
专利文献中隐含着该产品的需求信息,通过对专利文献的题名、摘要与说明书部分的信息提取,进而总结出专利产品的功能需求以及性能需求[9]。在进行功能模块划分时,将实现同一功能相关的零部件视为一个次系统,不考虑该系统内的组件之间的相互作用关系,该次系统即为一个功能模块。功能模块划分方法如下。
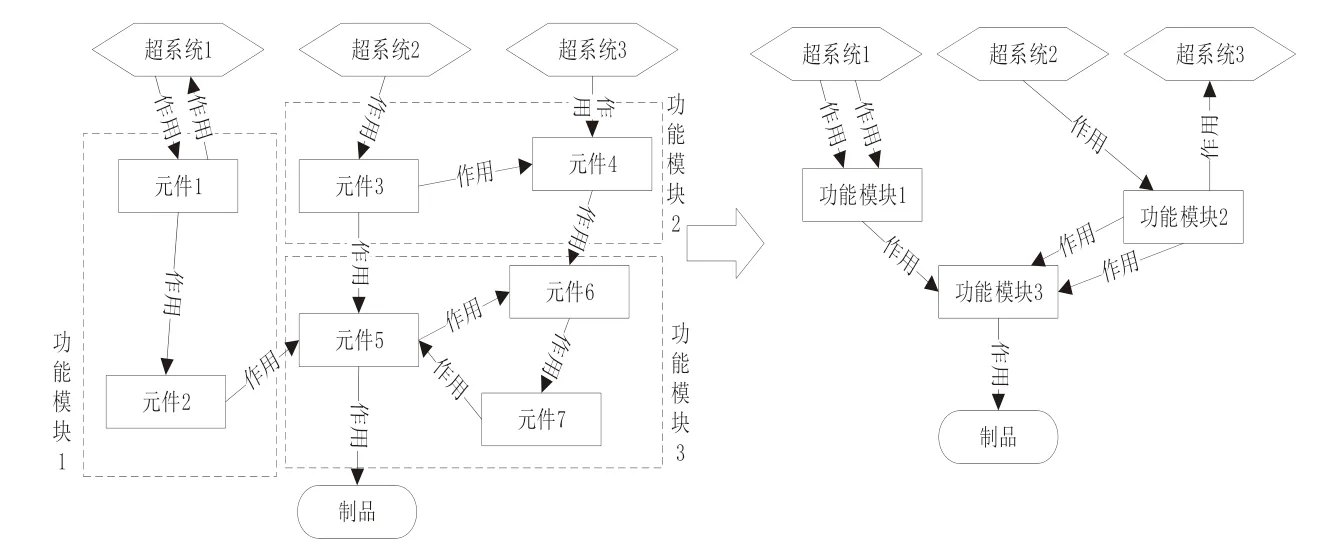
图2 专利功能模型及其模块划分
3.2 专利功能重要度的计算
产品所实现的分功能在地位上一般是不等同的,为此需要对各功能模块所实现的功能进行权重的分配。功能模块为系统元件为实现单一功能的集合,可以将其视为一个整体进行分析,因此可通过功能分析、功能模型求解各功能模块的功能重要度系数。
本文依据创新软件 TechOptimizer 中的功能等级评估方法来确定专利功能重要度。功能等级的定义规则与计算规则如下表2、表3。
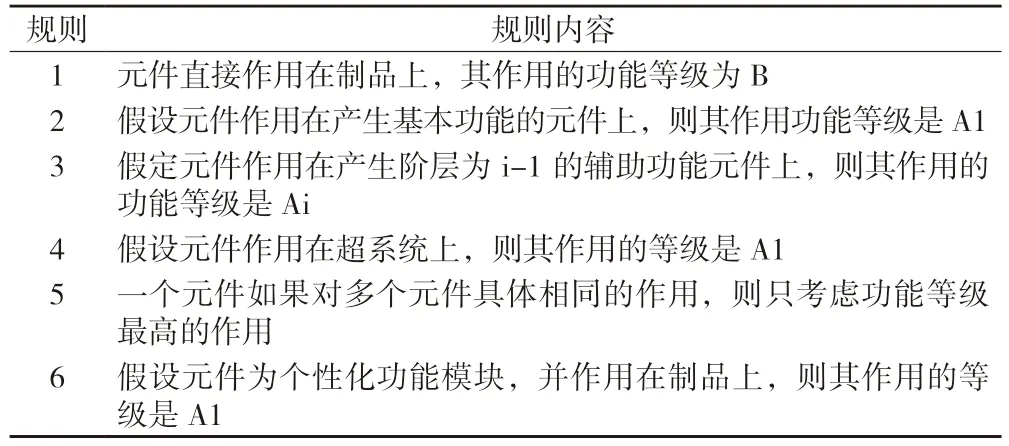
表2 功能等级定义规则
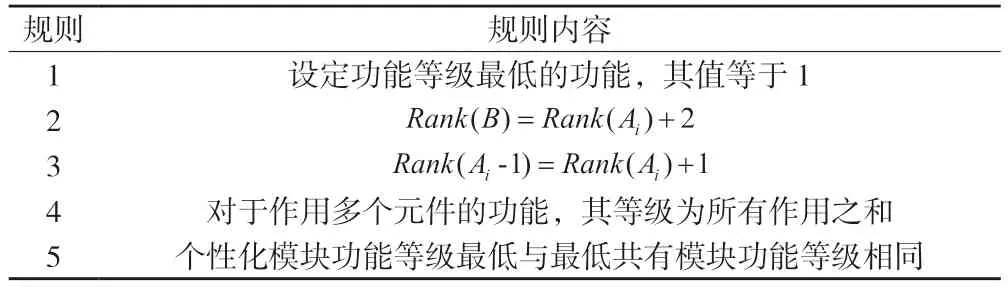
表3 功能等级计算规则
专利功能重要度计算步骤如下:
(1)根据功能模块、制品和超系统及其之间的作用关系建立功能模型;
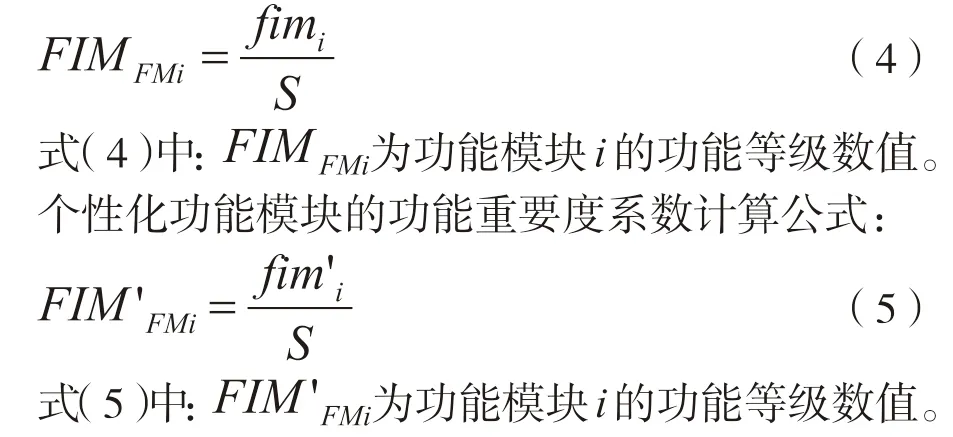
(3)以共有功能模块为标准确定功能等级数值,将所有共有功能模块的功能等级求和,其和记为S。然后计算其功能重要度系数;
共有功能模块的功能重要度系数计算公式:
3.3 功能创新度的计算
大量的技术改进都是基于现有技术基础上进行的,专利技术越是在基础层面上的创新,其与现有技术相比区别越显著,则其越有可能成为某一领域的基础技术,拥有较高价值。因专利技术的整体创新程度较难判断,因此本文以功能模块的角度对各个分功能的创新程度进行逐一分析。创新程度可分为功能层面的创新、原理层面的创新与结构层面的创新,可分别从功能、效应及结构角度判断。功能创新度判断流程如下:
(1)提取各专利该功能模块的功能及效应,并分别将其记入目标专利库的功能库及效应库;
(2)功能分级及对比。依据Kano 模型中的需求分级[10]判断该功能需求是否为期望需求或兴奋需求;
(3)效应对比。效应反映技术的实现原理,通过效应判断原理差异;
(4)提取功能模型中的技术特征。判断技术特征及功能模块间作用关系的创新性。
判断规则如下:

表4 创新程度判断规则
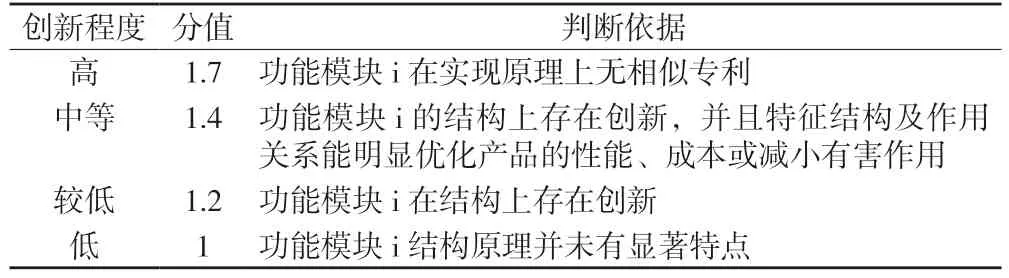
表4 (续)
3.4 性能实现度的计算
产品或系统的性能一般由用户的性能需求来决定。功能模块的性能重要度本质上是元件的参数影响产品性能的程度。
QFD[11](质量功能配置)是一种产品设计过程中辅助形成产品概念的方法,其核心为质量屋(HOQ),通过HOQ 可以探究顾客需求与产品零部件质量特性的关系[12]。基于QFD 可确定性能需求与产品零部件特征的关系,进而计算零件特征属性对产品性能的影响程度。具体步骤如下:
(1)确定产品性能。专利文献中往往隐含着对该产品的需求信息,对专利题目和摘要内容进行需求提取,确定该领域产品的性能需求,并结合需求出现频率,使用层次分析法进行性能的权重赋值。权重记为w={wi}。
(3)建立性能-属性关系矩阵HOQ。在 HOQ 中,每行对应的是产品性能,每列对应的是功能模块的内部对性能产生影响的相关属性,关系矩阵表示产品性能与其影响属性之间关系的定性评价。定性关系用图形符号“空白(无关)、△(弱相关)、○(中等相关)、●(强相关)”表示两者之间影响的强弱关系,见下表5。图形符号根据用户需求以及实际情况判断得出。
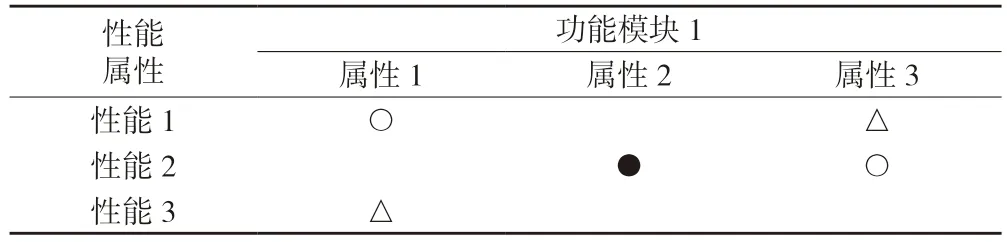
表5 功能模块1 性能-属性关系矩阵
将△、○、●分别赋值为1、3、9,并建立性能-属性关系值矩阵。
(4)计算性能偏向度系数。性能偏向度系数PIMFMi为该功能模块的偏向值对专利所有共有功能模块偏向值之和的比值。
(5)建立属性-特征关系矩阵。在关系矩阵中,每行对应的是产品零部件对性能的影响属性,每列对应的是专利权利要求或说明书中记载的相应技术特征,关系矩阵表示属性与技术特征之间关系的定性评价。定性关系用图形符号“○(特征对属性优化不大)、+(特征对属性产生正面优化)、-(特征对属性产生负面优化)”表示两者之间影响的关系。建立功能模块内部元件间的功能模型图,通过功能模型及专利文件说明判断符号类型。

表6 属性-特征关系矩阵
将-、○、+分别赋值为-0.5、0、0.5,将每行求和得到单个属性j 的特征优化度fj,令bj=fj+1,并建立属性-特征关系值矩阵。
(6)计算性能实现度系数。性能实现度的计算公式如下:

3.5 成本评价值的计算
专利技术产品中的成本往往是难以判定的。专利文件中往往不会对其组成元件进行详细描述,使得其成本的评估变得非常困难。不同专利间,其在现有技术下实现相同功能的元件其成本一般是相近的,可视为同等成本元件。因此,本文将专利中的元件以低成本元件、中成本元件以及高成本元件代替来近似计算。低成本元件判断标准为成本明显低于大部分元件的元件;高成本元件判断标准为成本明显高于大部分元件的元件。
本工作采用不同氮含量保护气氛下熔炼坯料、1 000°C固溶保温1 h并快速淬火的方式研究了N含量对Fe-21Cr-3Ni-1Mo-N双相不锈钢凝固组织的影响,并得出以下结论.
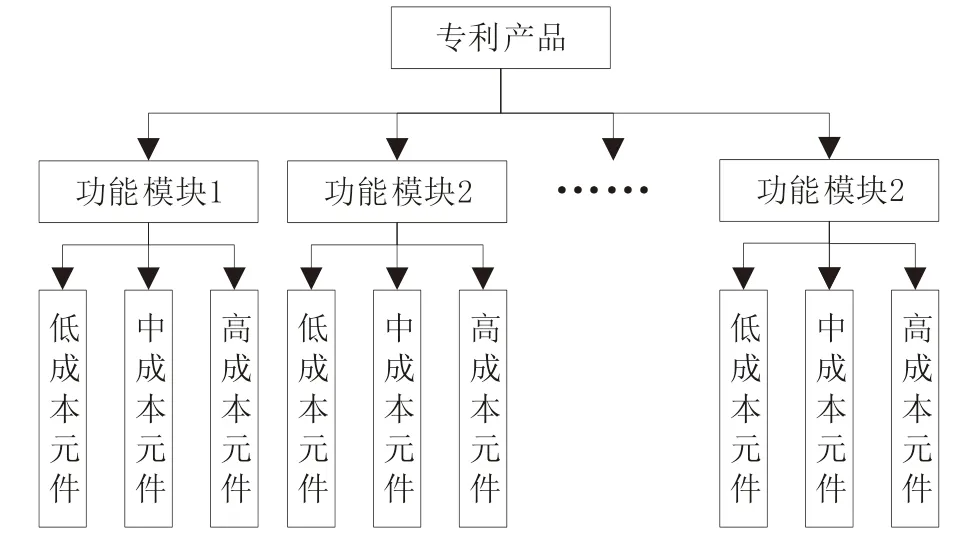
图3 成本分类
专利的成本系数计算如下:

在权利要求项中记载的一些元件独有的特征结构,因其制造过程中会增加成本,因此可将这些结构视为低成本元件。如果某一元件同时属于两个功能模块,则其元件数量规定如下:
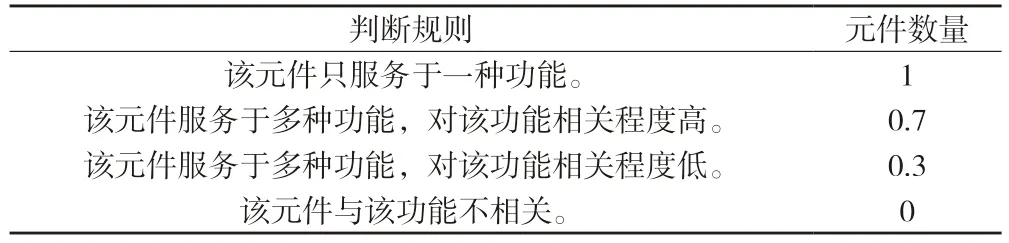
表7 成本元件判断规则
3.6 有害功能评价值的计算
有害功能指所有能够给系统带来负面影响的因素。元件、制品与超系统之间的作用往往并非只有有用作用,有时也会产生不足作用、过度作用以及有害作用[13]。这些负面作用均源于有害功能,有害功能的影响分为两类,一类为对系统的功能或性能产生的负面影响,包括元件间的有害、不足和过度作用;另一类为对系统所在环境产生的负面影响,一般为元件产生的有害作用。通过元件的输出流可判断两元件间的作用关系是否为有害功能,当输出流并非系统实现预期功能所需要的资源时,或输出流沿着设计流向之外的方向流动时,此时的相关作用为有害作用[14]。通过建立元件间的功能模型图,分析系统各组成部分间的作用关系,建立有害功能作用表。两种有害功能需要各自计算其评价值。
第一类有害功能评价值通过功能等级来确定,功能等级计算规则见表2 与表3,并添加以下规则:将有害作用所在的功能模块视为系统,该功能模块的对外功能作用对象视为制品,施加给该功能模块的外部元件视为超系统,重新计算功能等级,并依据功能等级以及有害功能所影响的性能计算有害功能系数。
第二类有害功能按照用户对其产生危害的可接受程度划分,判定规则如下:
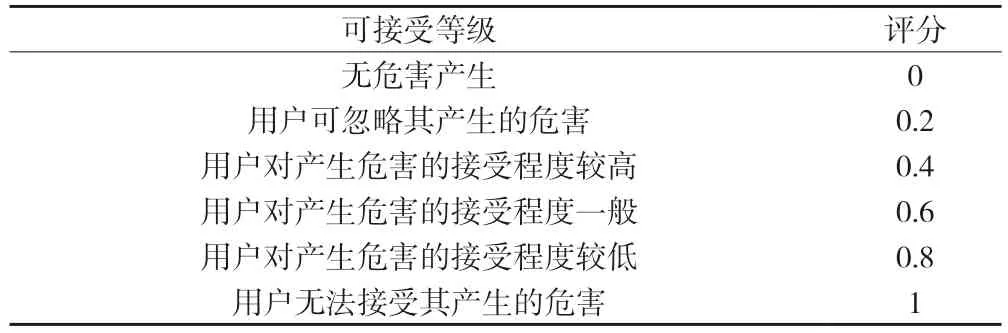
表8 有害功能可接受等级判断规则
有害功能评价值计算公式为:

3.7 调整系数的计算
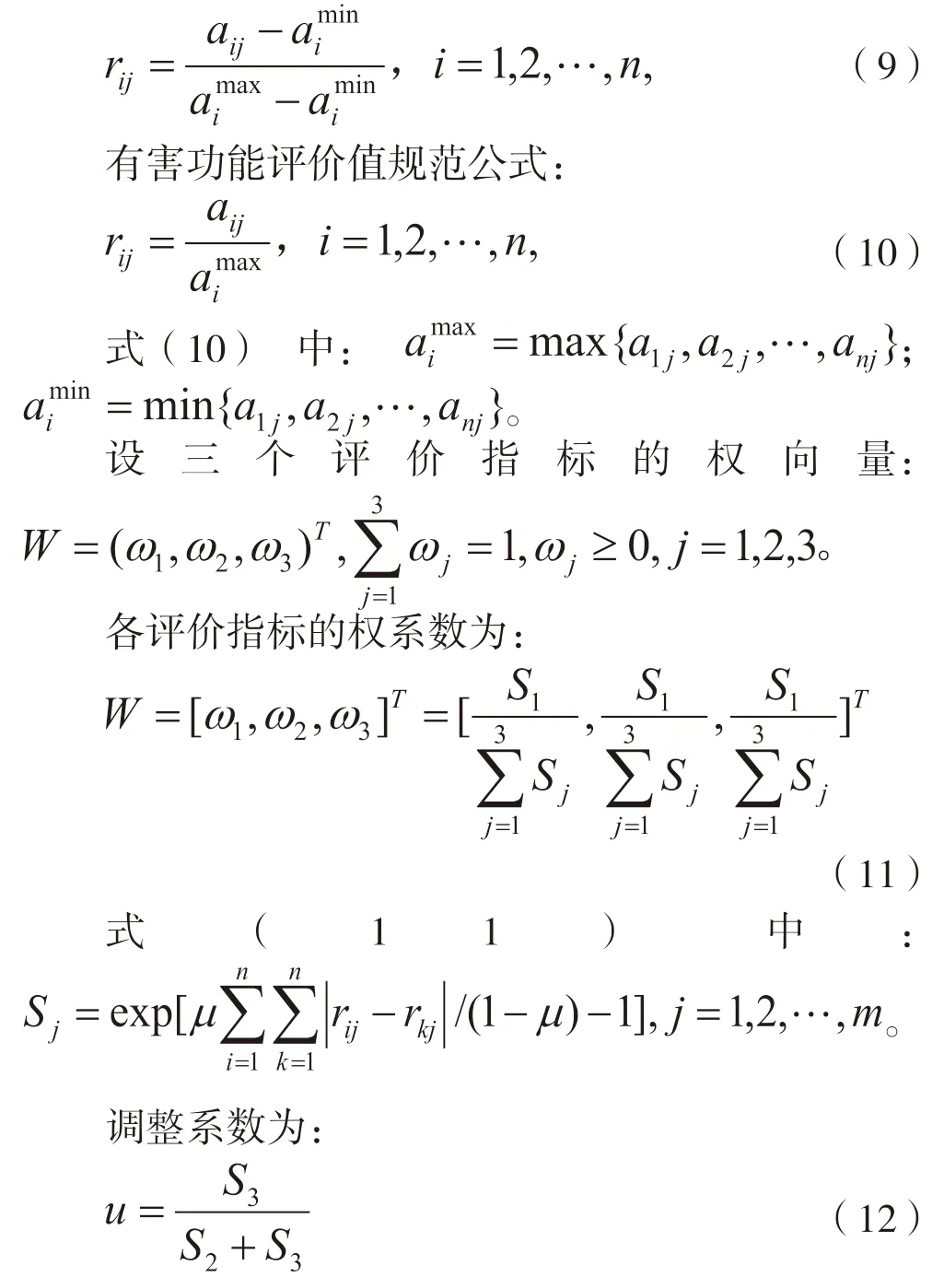
性能、成本和有害功能对系统的影响程度是不同的,对于专利的价值而言,某一指标在不同专利间的差异越大,相对其竞争能力差异就越大,根据评价指标在各评价对象之间的差异性可进行权重赋值[15],因此本文在文献[16]中最大离差和熵法的基础上求解有害功能的调整系数。由于性能、成本及有害功能的评价指标具有不同的量纲及量纲单位,为了消除其差异性而带来的不可共度性,故将评价指标进行无量纲化处理。
设评价样本数为n件,则对于功能模块FMi,其n件样本的性能、成本及有害功能三个评价指标构成评价矩阵。评价矩阵规范化后矩阵R记为。
性能实现度及成本评价值最低值不会为0,二者会有一个基础数值;而有害功能系数最低值可以为0(即有害功能不存在)。故三者的规范公式如下:
性能实现度及成本评价值规范公式:
3.8 专利价值度的计算
3.8.1 共有功能模块价值度计算公式
专利共有功能模块i 的价值度计算公式为:

3.8.2 个性化功能模块价值度计算公式
专利个性化功能模块i 的价值度计算公式为:
3.8.3 最终价值度的计算
专利的最终价值度为初筛价值度和功能价值度之和,计算公式如下:

4 案例分析
管道作为一种重要的物料输送设施,广泛应用于石油、化工等领域,管道机器人是一种可沿管道内部行走,携带一种或多种检测设备及操作机械,在工作人员的遥控操作或计算机自动控制下,进行一系列管道作业的机、电、仪一体化系统[17]。管道检测机器人的主要用途为管网的验收及缺陷检测。下面以管道检测机器人为例对本方法进行验证。
4.1 专利筛选
限定专利筛选范围,使用检索式:(管道 AND机器人 AND (检测 OR 探测)) AND IPC:(F16L55),得到专利787 件,其中发明专利235 件,实用新型专利277 件。由于专利数量较多,工作量大,故本文仅随机挑选10 件筛选后的专利进行分析。
根据公式(1)计算得到10 件专利的初筛价值度如下:
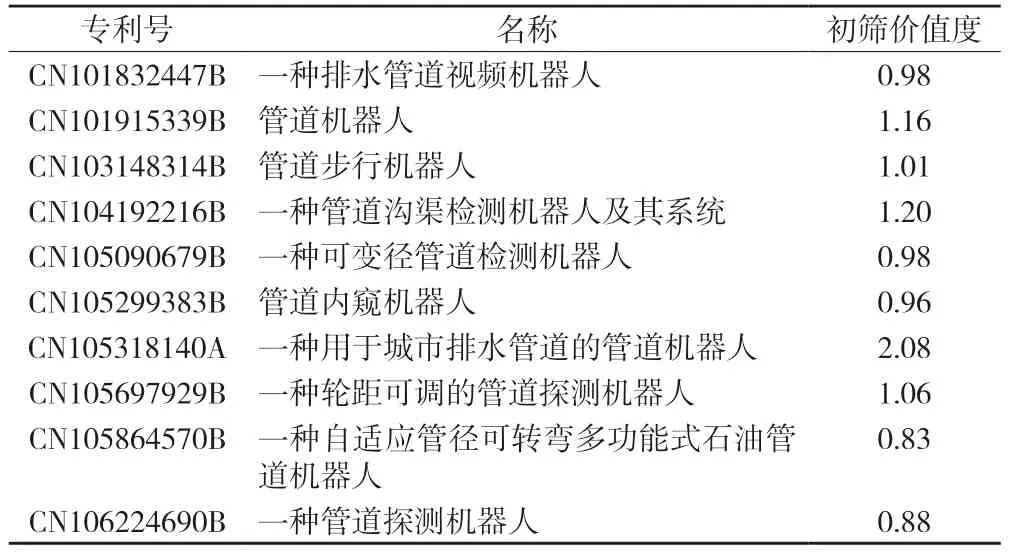
表9 管道机器人初筛价值度
4.2 需求提取及共有功能模块的划分
对其题名及摘要进行信息提取,得到专利功能及性能需求信息:
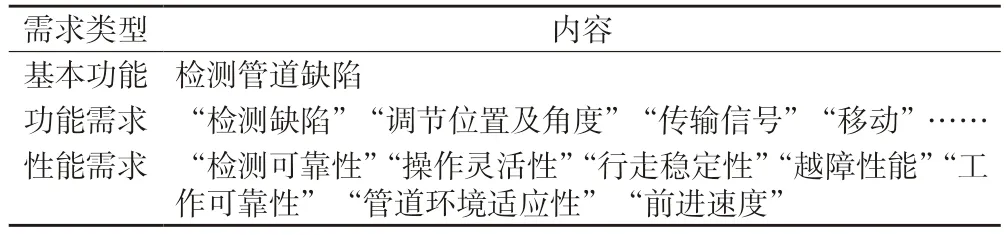
表10 需求信息表
因评价公式(16)中已考虑成本要素,故“成本”需求不需考虑。
根据功能需求,将管道机器人的技术系统的共有功能模块划分如下:移动模块FM1、检测模块FM2、传输模块FM3、镜头调节模块FM4 以及控制模块FM5。
4.3 功能重要度计算
系统的制品为拍摄到的管道,超系统为地面、操作员等。根据各模块间的相互作用关系,建立如下功能模型图:
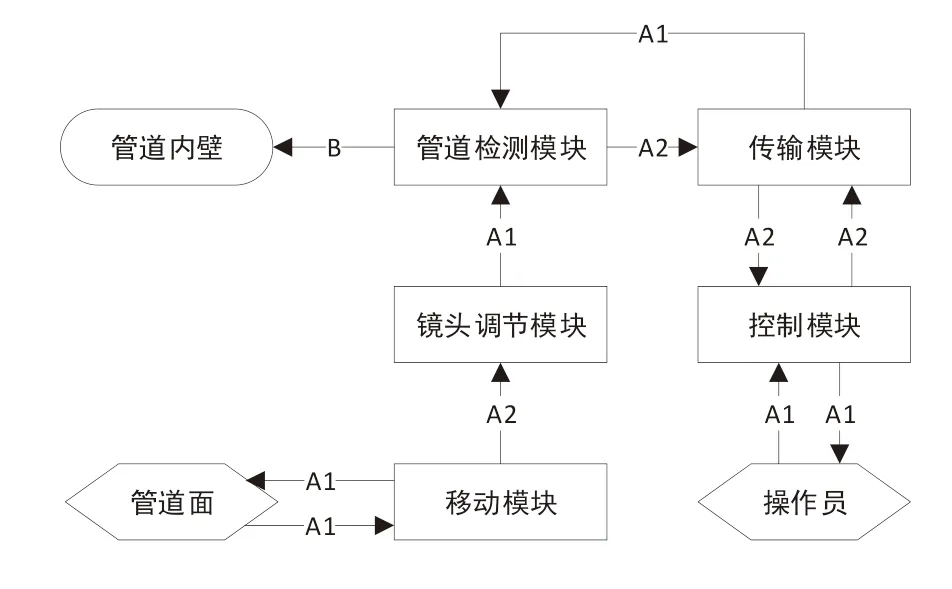
图4 管道机器人共有功能模块分析模型
管道机器人的功能重要度见下表:

表11 功能重要度
4.4 功能创新度计算
对筛选后专利的功能模块进行检索对比,根据判定条件确定各功能模块的创新程度。
以专利CN101832447B[18]的移动模块为例,首先分析其效应,其驱动子功能的效应为“旋转-扭矩力”,无创新性;移动子功能效应为“移动-摩擦”,无创新性;传动子功能效应为“旋转-扭矩力”,无创新性,该模块在原理上无创新。然后建立实现移动功能的功能-结构映射及移动模块关系表。

表12 移动模块关系表
在本专利中,通过前后电机的分别控制来实现转向来代替转向机构;通过锥齿轮及铰链传动具有一定创新性;通过检索“双电机”“锥齿轮”“铰链”等关键词,确定专利CN101832447B 移动模块的创新等级为1.2 级。
其各个模块的功能创新度为:
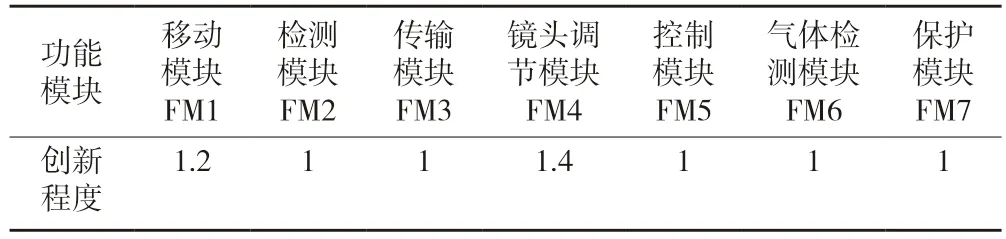
表13 功能模块创新程度
4.5 性能实现度计算
(1)性能指标权重计算。管道机器人的相关性能指标包括:检测可靠性、操作灵活性、行走稳定性、越障性能、工作可靠性、管道适应性、前进速度。利用层次分析法得到各指标权重:

表14 性能权重
(2)性能-属性关系矩阵。以专利CN101832447B[18]的移动模块为例,建立移动模块性能-属性关系矩阵。
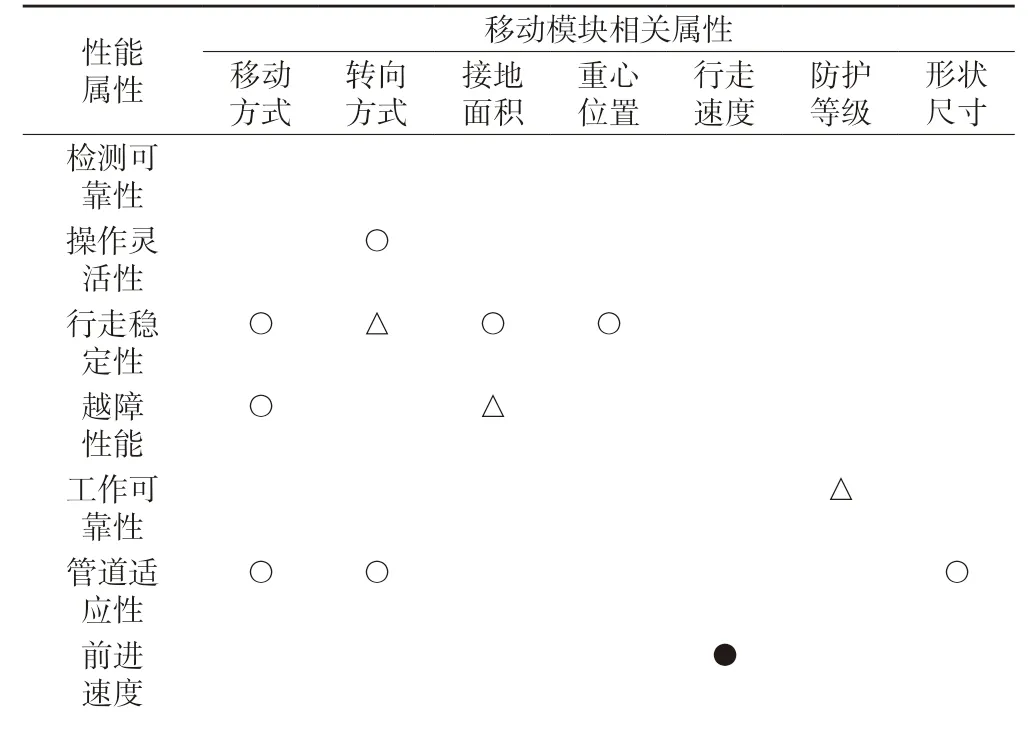
表15 移动模块性能-属性关系矩阵
得到性能-属性关系值矩阵A。
(3)性能偏向值。由性能-属性关系值矩阵得到管道机器人的移动模块性能偏向值为3.982 4;管道机器人其他模块性能偏向值如下:

表16 性能偏向度
(4)属性-特征关系矩阵。建立移动模块的属性-特征关系矩阵:
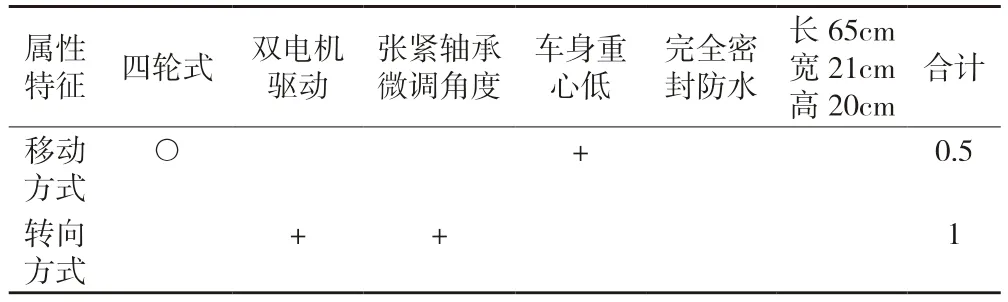
表17 移动模块属性-特征关系矩阵
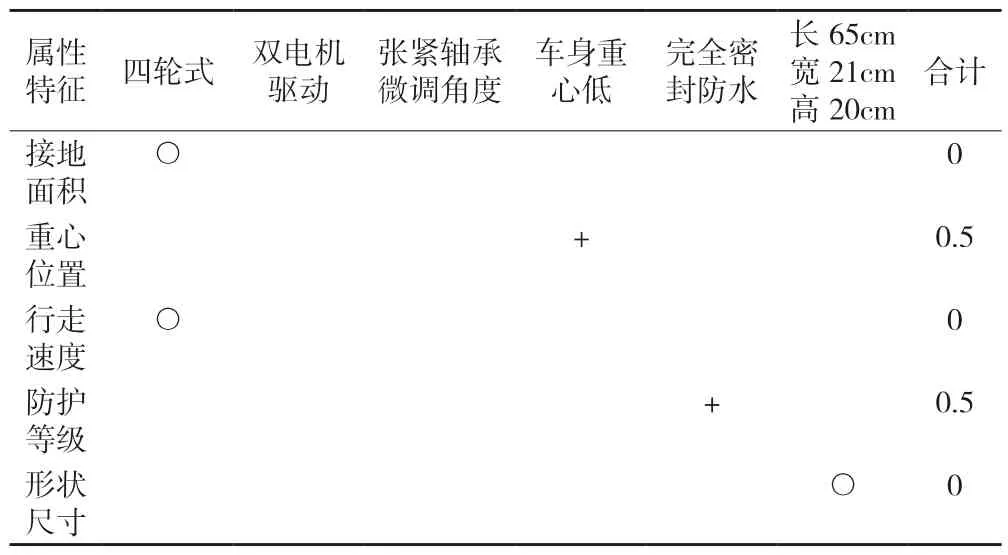
表17 (续)
得到属性-特征关系值矩阵B。由此计算出移动模块的性能实现度为5.817 8。同理得到专利各模块的性能实现度如下:

表18 性能实现度
4.6 成本评价值计算
对专利文件中记载的元件进行分类统计,得到管道机器人的成本评价值如下:

表19 成本评价值
4.7 有害功能评价值计算
以专利CN101832447B[18]为例,对其进行功能分析;
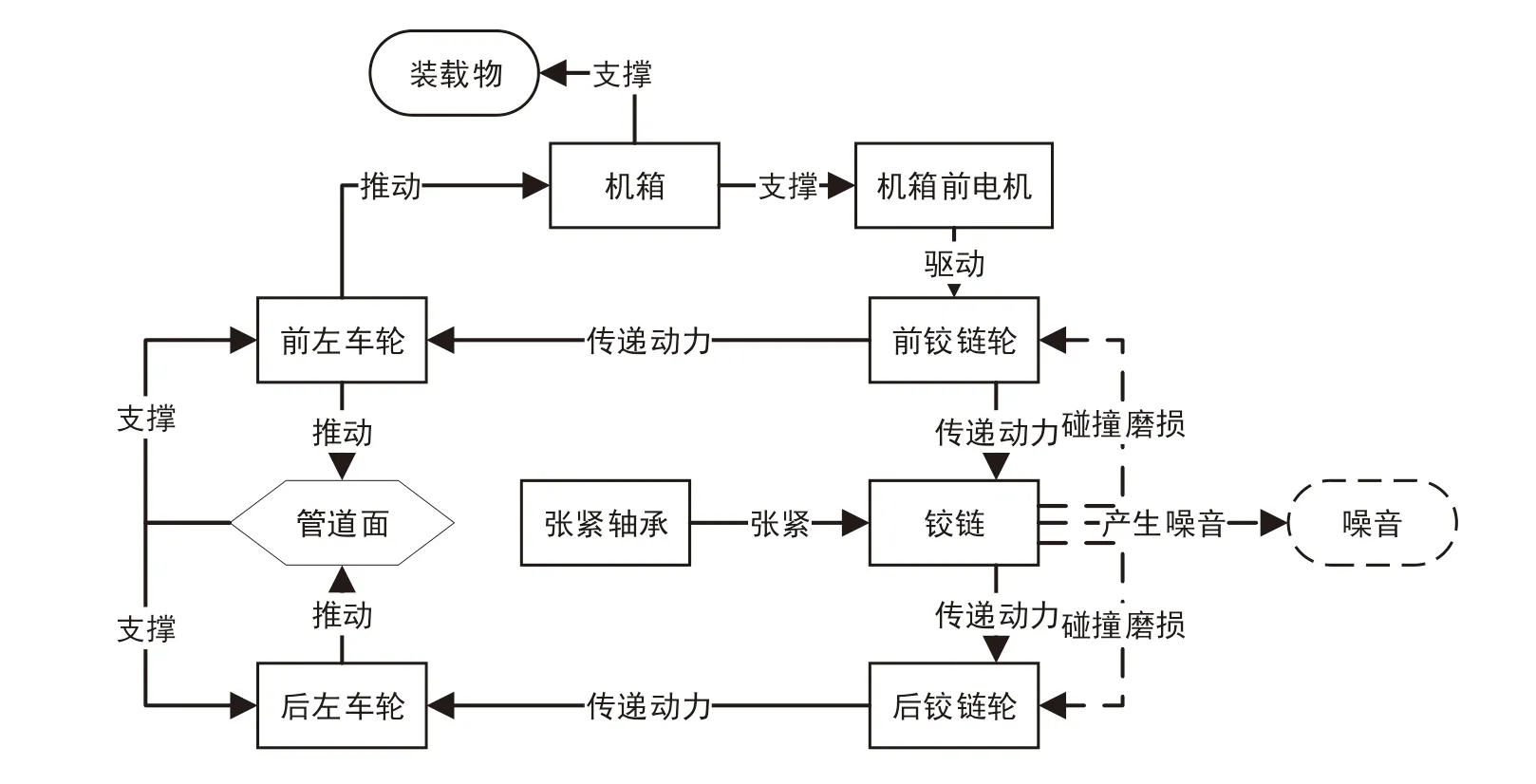
图5 专利CN101832447B 的移动模块有害功能分析
图中实线为有益功能,虚线为有害用哪个。从功能模型中不同元件之间的相互作用关系可以看出,该专利存在以下问题:
(1)铰链轮与铰链之间存在磨损,长时间使用会导致其可靠性下降,该危害从第一类有害功能中产生;
(2)铰链传动会发出较大噪音,该危害从第二类有害功能中产生。
对于第一类有害功能,其影响的性能为工作可靠性,作用关系的功能等级与该系统中最大功能等级的比值为0.2,其评价值为0.022 9。该模块的平均评价值为0.035 4。对于第二类有害功能,噪音对用户属于可忽略的危害,故其评价值为0.2。
由公式(8)计算得该专利的有害功能评价值为0.523 2。
4.8 调整系数计算
将前面得到的数据进行汇总,并求出平均性能实现度以及成本评价值,使用公式(11)进行计算,处理得到移动模块三个评价指标的权系数为:S=[0.432 5 0.421 6 0.145 9]。
调整系数u=0.346 1。专利CN101832447B 移动模块功能价值度为:0.530 9。
4.9 个性化功能模块价值度计算
作为专利样本库的十件专利其各功能模块的平均性能及平均成本如下:

表20 各功能模块的平均性能及平均成本
得到该专利样本库的平均性能成本比为0.136 4。
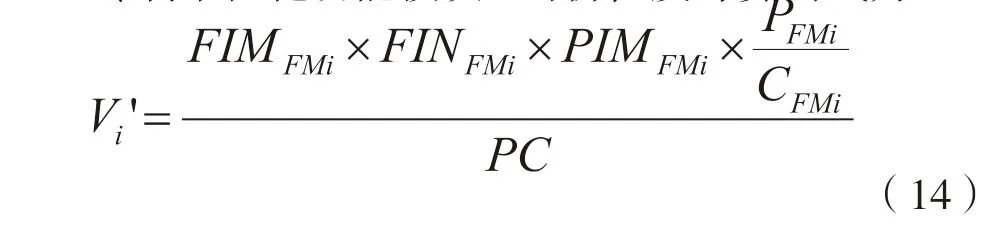
以专利CN104192216B 为例,其个性化模块为环境检测模块,作用是检测管道内的气体组成、温度等多种环境信息及管道机器人的倾斜情况,可提高检测准确性及工作可靠性。将该模块加入到功能模型中得到其功能重要度为0.13;根据性能实现度求解过程,得到其性能实现度为1.201 5;成本评价值为6。由于专利样本库中只有该专利有此功能,故环境检测模块的性能偏向度与该专利环境检测模块的性能实现度相等,即值为1.201 5。
由个性化功能模块的计算公式(14)求得环境检测模块的技术水平为0.152 9,其对专利整体价值影响度为0.019 1。
4.10 专利价值度的计算
(1)功能模块价值度。基于功能分析的高价值专利判断方法可以对单个技术模块进行价值评价,以下是移动模块的评价分析:
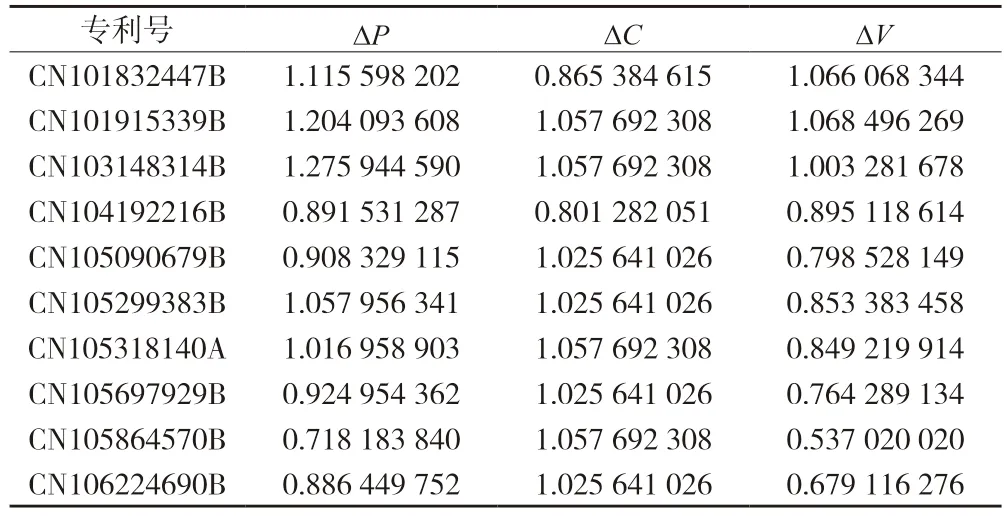
表21 移动模块价值分析表
从上表中可以看出,相对性能水平较高的专利有CN101832447B、CN101915339B、CN103148314B;相对成本较低的专利有CN101832447B、CN104192216B;专利CN101832447B、CN101915339B、CN103148314B 的移动模块在技术上存在优势。企业可根据对性能、成本及综合情况对专利进行取舍。
(2)综合价值度。将初筛价值度与功能价值度的权重比值设为0.2:0.8,最终得到十件专利的价值度计算结果及如下:
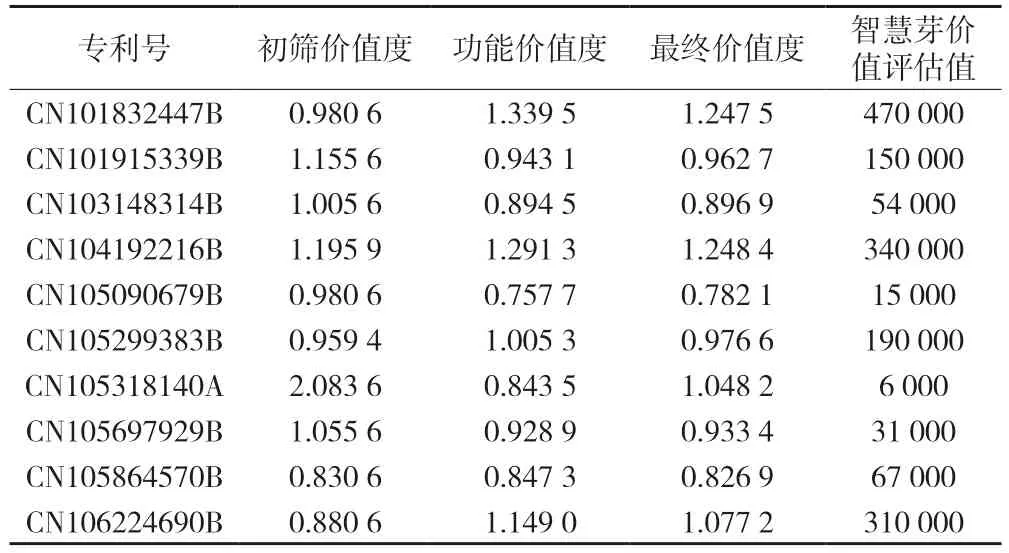
表22 各专利价值度
结果分析:
初筛价值度用于评价专利在法律与战略层面的价值高低,功能价值度用于评价专利技术水平的高低。专利CN101832447B 与专利CN104192216B的综合价值度较高。技术价值最高的专利为CN101832447B,专利CN105318140A 在法律及战略层面具有较高的价值,而技术层面价值相对不高。
移动模块与镜头调节模块是管道机器人专利设计创新的重点。专利CN106224690B 的移动模块具有较高的创新性,但相对理想化水平不高。检测模块及传输模块各专利间差别不大,检测模块的改进倾向于使用多种检测方式提高准确率;传输模块方面专利CN106224690B 设计了一种防止电缆线干扰的方法。控制模块方面,专利CN104192216B 与CN101915339B 进行了设计。镜头调节模块方面,专利专利CN101832447B 拥有较高的性能实现度。
从结果看,本方法计算得出的专利价值评价值与专利检索网站智慧芽中给出的专利评估结果相差不大,部分专利因评价角度不同略有差别。
5 结论
本文依据TRIZ 理论中的功能分析法与理想度理论,提出了一套技术领域通用的专利价值评价方法。该方法先通过定量指标进行筛选,剔除低价值专利,之后对专利技术进行功能分析,得到其关于功能、性能、成本以及危害的评价指标。该方法不仅可以帮助研究人员快速筛选高价值专利,降低评估人员的专业要求,而且还能针对某一专利的局部技术优势和缺陷进一步分析。通过对实例的分析,表明该方法具有一定的理论意义和实用价值。
