广义互相关时延估计法声源定位研究
2021-01-11董晓红
董晓红,康 平
(包头职业技术学院 人文与艺术设计系,内蒙古 包头 014030)
1 问题分析
假定在一个全部由光滑大理石组成的大厅里,只有一个走动的人,发出清晰的脚步声,在大厅里放一个麦克风树。通过建立合理的数学模型,设计一个成本尽量低,能够达到使用要求的麦克风树。设计每只麦克风的相对位置以及相对于地面的高度。根据声源定位,确定人的位置和测量大厅轮廓尺寸。
2 问题的求解
2.1 算法
“广义互相关(GCC)时延估计法”可以看作麦克风阵列的一种声音定位法[1],该算法定位精确度高,应用性强。步骤有:定位和时间延迟估计,如图1如示。

图1 算法原理
本文研究的是麦克风线性阵列,然后估计各个TDOA的时延,最后进行麦克风声源定位[2]。在实际应用中,基于时延估计法进行麦克风声源定位的方法有很多,广义互相关应用的比较多。
2.2 互相关延时估计方法
建模如下:
X1(n)=S1(n-ψ1)+n1(n)X2(n)=S2(n-ψ2)+n2(n)
(1)
S(n)为声源信号,n1(n),n2(n)是一对互不相关的高斯白噪声,二者与s(n)互不相关。τ1,τ,2为声波传导时间,τ12=τ1-τ2,两麦克风阵列间时延为τ12。
x1(n)和x2(n)的相关函数R12(τ)可表示为:
R12(τ)=E[x1(n)x2(n-τ)]
(2)
将式(1)带入,得:
R12(τ)=E[s(n-τ1)s(n-τ1-τ)+E(s(n-τ1)n2(n-τ))]+E(s(n-τ2-τ)n1(n))+E[n1(n)n2(n-τ)]因为s(n),n1(n)和n2(n)三者互不相关,从上面可知
R12(τ)=E[s(n-τ1)s(n-τ1-τ)]=Rs(τ-(τ1-τ2))
(3)
根据上面的函数性质可知,当这个时延条件τ-(τ1-τ2)=0成立时,R12(*)达到峰值,可得出R12(τ)最大值,此最大值所对的τ即两麦克风间时延τ12。此方法简单明了,假设不同信号间、不同噪声间互不相关的条件,实际不容易做到[3]。因此采用广义互相关函数时延估计法,来减轻或消除噪声干扰的影响,提高精度。原理如图2所示。
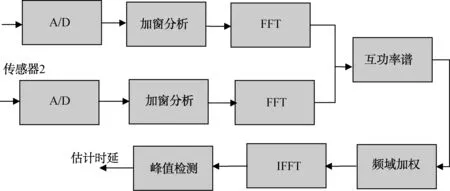
图2 广义互相关GCC求时延估计原理
其中G12(w)是传感器接收信号的x1(n)与x2(n)的互功率谱。
声源信号的广义互相关函数,即:
其中Ψ12(w)为加权的广义互相关函数,主要由噪声与反射情况来选择广义互相关加权函数。
2.3 声源定位的模型分析
本文主要研究平面的声源定位,只要测出θ即可。首先在MATLAB中先定义一个声源是s(θ,r),然后用N-1来定义下一个信号的来源,计算出其中的时延。下面是均匀线阵远场模型:声源s(θ,r)。

2.4 时延估计的测量与计算

3 模型评价与推广
3.1 模型的优点
(1)本文运用了数字、表格和文字说明,以及MATLAB分析图软件等来说明如何通过麦克风树“远场定位模型”与“广义互相关时延估计法”来确定声源的位置这一实际问题,解决了单个麦克风无法分辨声源方向的难题。
(2)本文所建立的模型与实际紧密联系,推广性较强。
3.2 模型的缺点
(1)本文建模时,将某些变量忽略不计,可能会出现一些误差。
(2)本文所建立的模型,忽略了空气的湿度、气压、噪声等因素对结果的精确度影响,还应加强这些因素的研究。
3.3 模型的改进
在本文所用的模型中,主要研究对单个声源的定位,今后还需进一步对多目标的声源定位展开研究。
4 结论
(1)声源定位远场模型中麦克风收集到的声波为平面波,所以每个麦克风接收到的信号相位相同,便于研究。
(2)本文使用基于GCC的算法对声源进行定位研究,该算法计算量小,定位较为准确。
(3)麦克风树排列麦克风的方法很多,有一维、二维和三维麦克风阵列,通过本文的研究,发现使用线性阵列,其阵元之间距离相等、相位及灵敏度一致,更利于研究。
(4)本文用MATLAB的仿真实验,求出时延TDOA,然后进行反向推导就可以求出θ,从而确定声源的位置。
(5)与单个麦克风相比,麦克风树由多个麦克风构成,具有拾音范围广,性价比高,受环境影响小等优点,在语音信号处理中更占优势。
文章运用了数字、表格和文字说明,以及Matlab分析图软件等来说明如何通过麦克风树“远场定位模型”与“广义互相关时延估计法”来确定声源的位置这一实际问题,解决了单个麦克风无法分辨声源方向的难题,所建立的模型与实际紧密联系,推广性较强。