全自动追踪污染源移动净化器
2021-01-06德州学院机电工程学院孔明王志坤
德州学院机电工程学院 孔明 王志坤
目前大多数家庭净化器为大型定点式,笨重、占地率高且净化效率低。根据这些缺点,我们提出制造可折叠追踪净化器,为方便使用,在净化空气的时候,顺便解决家庭卫生情况,为此加入扫地功能,两者功能结合,无需人为管理,自动对家庭环境进行全面清洁。
本文在stm32 单片机的基础上,安装气体检测模块,通过空气中浓度的变化,以及定位系统进行移动,安装光电开关以及感应模块,实现自动避障,防止碰撞,以防损坏家具。全自动追踪污染源移动净化器具有普通扫地机器人的功能,安装电机和麦克纳姆轮,可以随时前后左右灵活运动。将整个净化器进行机械结构改造,实现工作时净化器展开,闲置时净化器折叠,节省家庭空间。通过手机app 控制,实现互联网连接,随时监测家中的空气质量,根据家中情况,灵活选择净化器运行或停止,合理利用资源,当空气质量优时净化器将自动关闭。这些功能体现了该净化器的多重优越性,可以满足家庭需求。
1 基于stm32 单片机的追踪系统的设计
设计系统总体思路,如程序框图1。
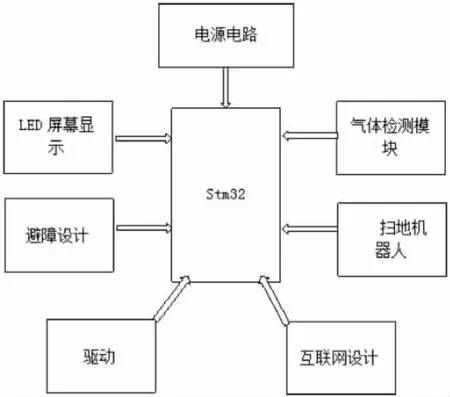
图1
1.1 监测系统的设计
用stm32 单片机作控制系统,在此基础上安装空气检测模块,空气检测模块是由TGS2600 气体传感器、PM2.5 传感器DN7C3JA001 和QM1H0P0073 温湿度传感器MQ 系列传感器五合一组成的。采用ES485 数据总线和UART 串口TTL 电平两种输出模式,同时检测CO2,甲醛,TVOC,PM2.5,温湿一体。并对空气检测模块的灵敏度进行调节,达到最佳平衡状态。采用1024×600 电容触摸显示屏,3.3v 电源可以控制,GND 接负,SDI、SCL、CS 分别接入SPI 数据输入、时钟信号输入、选片信号输入。RST、RS、BLK 分别为复位、输入选择和输出,电容触摸显示屏如图2。实现产品的智能化,在线监测和数据收集,逐渐实现无人操作的全智能设备。

图2
1.2 运动系统的设计
运用NE0-07 GPS MINI 模块定位净化器,以及引导净化器移动。通过浓度变化,单片机安装TB6612FNG 电机驱动模块,启动步进电机,带动麦克纳姆轮移动。对浓度进行PWM采集,通过变化,控制驱动,驱动有PWM引脚,以及AIN 控制正反停转,AO连接电机的脚,控制电机的运动,实现自主移动。净化器移动过程中,空气更多地进入净化器内,更好地净化空气。加上手机APP 控制利于对净化器的精准控制,当空气中存在有毒气体,蜂鸣器发出警报,蜂鸣器通过IO 口,高低电平控制蜂鸣器,并向手机发送信号,实现互联网设计。图3 为APP 软件图。可实现平面中任何地方的移动,在回家之前可以观察家庭状况,详细了解家庭情况后,有更多的选择。
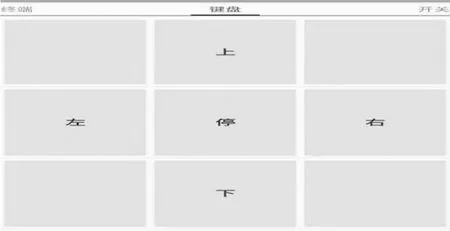
图3
1.3 扫地设计
在普通的扫地机器人基础上,对机器人外壳进行设计,实现扫地和净化一体机,无缝连接。在净化空气的时候,可以选择让扫地功能工作,也可以选择停止扫地工作,可以视家庭情况而定。该一体机节省家庭空间,功能多样化,对家庭清洁工作做到效率最大化。
2 外型设计
采用总体是长方形倒角结构,上方开孔,中间有屏幕显示和开孔,进行空气交换,下方小车设计,四轮模式,方便转动。如图4、图5。
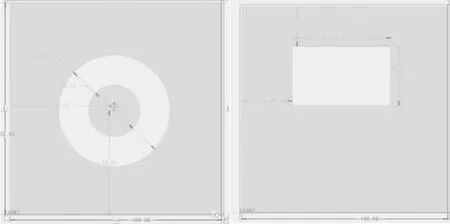
图4
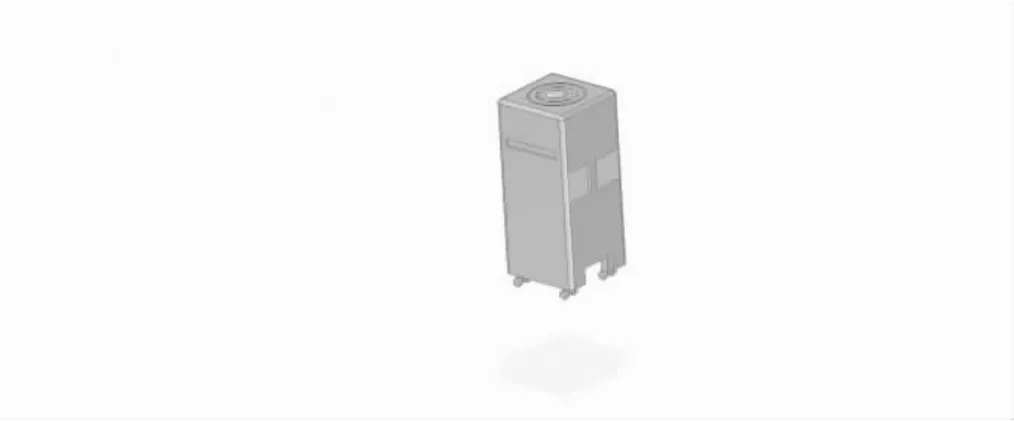
图5
3 总结
该产品将空气净化器进行了设计,如果将净化器固定位置,净化器的效率和效果会大大降低,该产品将在空气净化器上加入自动追踪空气净化检查技术,自动追踪空气中的污染源,追踪污染源然后将空气净化器进行移动,保证了转化的效率以及效果。除了自动追踪,我们还将智能显示空气质量,自动避障,手机APP 远程操控等技术集于一体,从而达到高效率,以及针对性地寻找污染源,满足了人们的需求,大大降低了空气中的污染物含量,让人们有好的身体以及心情。
