一种基于大容量电池驱动的清淤机器人
2021-01-06河北农业大学牛芃涵李耕宇索雪松王崇宇
河北农业大学 牛芃涵 李耕宇 索雪松 王崇宇
引言
中国城市化发展迅速,随着城市化的发展,城市污水管道长度不断增加,而污水管道的日常维护及管道清理工作面临巨大挑战,我们期望将管道清理中的一些危险、费力、费时的重复性工作交由机器来完成,从而减少人工成本,解放人力。污水管道的排污能力对于管道是否正常运行至关重要,它决定着污水管道是否被淤堵。管道清理需要经过一系列的环节才能将附着在管道上的淤泥清除并运至地面进行处理。我们希望管道的清理工作可以交由机器来完成,从而设计了一款针对管道清淤工作的机器人。
1 系统的整体设计
1.1 设计任务和设计需求
1.1.1 设计任务
设计一款机器人对污水管道进行清理。
1.1.2 设计需求
(1)完成对附着在管道内壁及管道内的淤泥进行铲除并搅碎,可以将处理过的淤泥通过运送装置运送至地面。
(2)可以将在地下管道中处理过的淤泥运送至地面。
(3)机器人本身可以自主处理其在地下管道中所面临的各种问题。
(4)在清淤过程中适时拍摄清理过后的管道照片,将处理过后的管道照片与正常管道照片比对,找出管道内壁难以清理的淤泥,并将其备份至机器人储存空间内。
(5)在执行清理任务时,可以进行测距处理,明确机器人在管道内所在位置距离,方便在机器人出现故障时取出。
(6)每一次清理任务,机器人都需要完成5 千米的清淤长度,并且存有备用电源,紧急状态下机器人可以退回至起始点。
1.2 设计方案
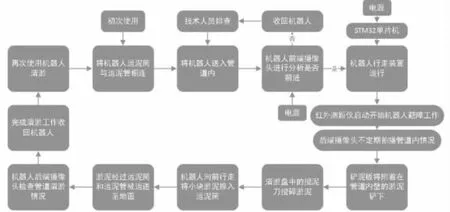
图1 机器人清淤流程图
2 硬件和电路的设计
机器人主体框架材料为钢制,机器人各种形状部位的制作均为保定市当地材料制作公司制作。机器人本身行走轮选自上海屹上脚轮有限公司的铝芯纹路橡胶AGV 机器人驱动轮设备行走主动轮。摄像仪器选取高清摄像头搭配补光装置。红外测距仪选取基恩士公司的CMOS 激光位移传感器IL 系列并搭配其公司软件完成对机器人测距的处理。将摄像仪器、红外测距仪、行走装置、搅泥装置通过数据线与电脑进行连接,STM32 单片机选择STM32103RCT6 即可,选择科尔摩根公司的AKMH 系列不锈钢伺服电机作为行走电机与单片机相连接。单片机对伺服电机进行控制并处理机器人在管道内的行走及清淤问题。机器人电池选用多组连接的12.8V 10Ah 锂电池。以上即为系统的硬件连接。
3 机器工作原理与系统控制
提前将无淤堵管道图像储存在机器人数据库中,机器人可以在清淤过程中适时抓拍,将抓拍图像进行处理,与无淤堵管道图像进行比对,找出淤泥在管道中的附着点,调整机器人行走速度及机器人刀片刀绞速度,通过铲泥板铲下淤泥,刀片进行搅碎和机器人向前推进,完成机器人对管道淤泥的铲除及运出。
机器人在污水管道的运行耗电量极大,因此为了确保机器人在管道行走距离超过5 千米,机器人装带有2 组12.8V10Ah锂电池。机器人在刀绞淤泥时,为防止淤泥块使刀片停转,机器人带有刀片电机电流过大停转功能,停转功能是由单片机控制的,单片机与刀片电机用数据线相连。为了完成对机器人多个行走单元的精确控制,机器人速度系统使用基于模糊PI 算法的控制系统[1]。
4 管道清淤机器人机械系统结构
清淤机器人的结构如图2 所示,其机械主体主要由3 部分组成,分别为1:后行走装置,2:前行走装置,3:清淤装置。

图2 专用型管道清淤机器人总体结构
由图2 可知,前行走装置处于整机的中间位置,是清淤机器人支撑、运泥的主要机构。前行走装置机构与后行走装置分界截面的截面简图如图3 所示,该机构主要由分布在圆周内5 组行走单元组成,各由1 个电机驱动,该清淤机器人采用后行走装置驱动的方式。在理想状态下,5 个独立的驱动电机不会启动,仅起支撑作用,仅在紧急情况下使用。
后行走装置是管道清淤机器人前进的主要动力机构。当清淤机器人在管道内向前推进时,后行走机构的电机启动,后行走装置左右两侧行走轮向前匀速滚动。
清淤装置上主要有清淤盘和铲泥板,铲泥板截面示意图如图4 所示。清淤装置通过铲泥板刮下附着在管道内壁的淤泥,并通过清淤盘中内置电机带动的4 个搅泥刀片,将大块的淤泥搅碎,并运至运泥筒中。
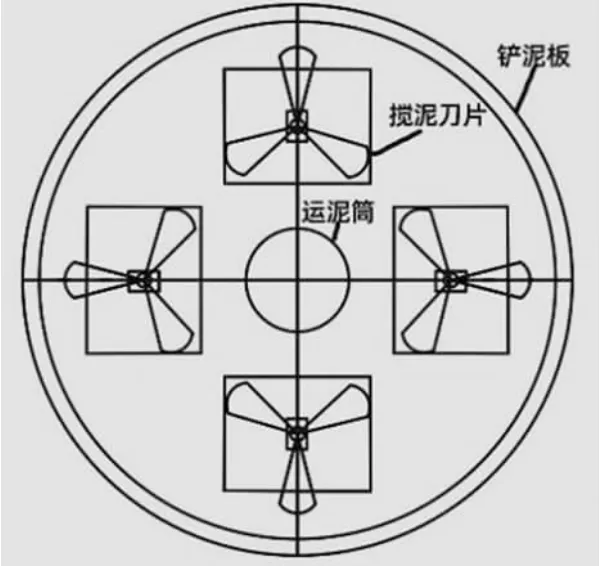
图4 铲泥板截面示意图
5 结语
通过将行走装置、摄像头、大容量电池、单片机等部件组成机器人,在内部软件的支持下实现管道清淤的机械化、智能化。虽然只能完成管道清淤,但是有效降低了管道清掏的人工与时间成本。
